


Combining local and metro continuous availability with out-of-region disaster recovery
In this chapter, we discuss the capabilities and considerations for implementing GDPS/Metro Global Mirror (GDPS/MGM) and GDPS/Metro z/OS Global Mirror (GDPS/MzGM). It is of interest to clients that have requirements for both continuous availability locally and regional disaster recovery protection.
GDPS/MGM and GDPS/MzGM combine the continuous availability attributes of GDPS/PPRC HM, GDPS/PPRC, or GDPS/MTMM with the out-of-region disaster recovery capabilities of GDPS/GM or GDPS/XRC to protect critical business data during a wide-scale disruption. They also provide for fast automated recovery under various failure conditions.
|
Note: Both GDPS/PPRC and GDPS/PPRC HyperSwap Manager can be combined with Global Mirror or z/OS Global Mirror, as described in this chapter. To aid in readability, only GDPS/PPRC is used in the text for most of the descriptions. If a particular function is not supported by GDPS/PPRC HyperSwap Manager, it is specifically mentioned.
Also, GDPS/MTMM can only be combined with Global Mirror, it cannot be combined with z/OS Global Mirror.
|
The following functions are provided by GDPS/MGM and GDPS/MzGM:
•Three-copy disk mirroring using GDPS/PPRC or GDPS/MTMM to support zero data loss for day-to-day disruptions at metropolitan distances, and GDPS/GM or GDPS/XRC for long distance, out-of-region data protection, with limited data loss during a wide-scale disruption.
•Four-copy1 disk mirroring combining GDPS/PPRC or GDPS/MTMM in the production region to support zero data loss for day-to-day disruptions at metropolitan distances, GDPS/GM or GDPS/XRC between the two regions, and another instance of GDPS/PPRC or GDPS/MTMM in the recovery region to manage Global Copy (PPRC-XD) that can be switched to synchronous-mode while moving production to the recovery region in a planned or unplanned manner.
•Multisite management of the remote copy environment to maintain data integrity and data consistency across all disk copies.
•Support for transparent switching to secondary disks if there is a primary disk storage subsystem failure by using GDPS/PPRC or GDPS/MTMM with HyperSwap.
This support offers the ability to incrementally resynchronize the GDPS/GM2 or GDPS/XRC mirror after a PPRC HyperSwap.
•Fast, automated recovery for RTO of less than an hour for site and regional disasters.
•Zero data loss protection for both open systems and z Systems by using GDPS/PPRC and GDPS/GM, assuming that only one site is lost during a disaster.
•Use of FlashCopy to facilitate nondisruptive functions (such as backups, data mining, application testing, disaster recovery testing), and to provide a consistent copy of the data during remote copy synchronization to ensure disaster readiness is maintained at all times.
•Planned switch to run production in the recovery region and then return home.
11.1 Introduction
Enterprises running highly critical applications have an increasing need to improve the overall resilience of their business services and functions. Enterprises already doing synchronous replication have become accustomed to the availability benefits of relatively short distance synchronous replication. This is especially true in mainframe environments where the capabilities of HyperSwap provide the ability to handle disk subsystem failures without an outage and to use server capacity in both sites.
Regulatory bodies (both governmental and industry-based) in various countries are requiring enterprises to maintain a significant distance between their primary and disaster locations to protect against wide-scale disruptions. For some organizations, this can result in a requirement to establish backup facilities well outside the range of synchronous replication capabilities, thus driving the need to implement asynchronous disk mirroring solutions.
From a business perspective, this could mean compromising continuous availability to comply with regulatory requirements. With a three-copy disk mirroring solution, the availability benefits of synchronous replication can be combined with the distance allowed by asynchronous replication to meet both the availability expectations of the business and the requirements of the regulator. Further extension to four-copy configurations allows for equivalent high availability characteristics when running in either region.
11.2 Design considerations
In the following sections we describe design considerations including three-copy solutions versus 3-site solutions, multi-target and cascading topologies, four-copy solutions, and cost considerations.
11.2.1 Three-copy solutions versus 3-site solutions
It is not always the case that clients implementing a three-copy mirroring solution will have three independent data centers (as shown in Figure 11-1), each with the capability to run production workloads.

Figure 11-1 Three-site solution
Having three distinct locations with both the connectivity required for the replication and connectivity for user access is expensive and might not provide sufficient cost justification. As the distance between the locations connected with synchronous mirroring increases, the ability to provide continuous availability features such as cross-site disk access, HyperSwap, or CF duplexing diminishes.
Having a production location with two copies of data within a single data center (shown in Figure 11-2), along with a third copy of the data at a remote recovery location, provides you with many of the benefits of a full 3-site solution while allowing for a reduced overall cost. Disk subsystem failures are handled as local failures and if the single site has some degree of internal resilience, then even minor “disaster-type” events can perhaps be handled within the single location.

Figure 11-2 A 2-site solution
Another benefit of the two-data center solution, especially in a z Systems environment, is that you can realize the full benefit of features such as HyperSwap and coupling facility duplexing to provide continuous availability features without provisioning significant additional and expensive cross-site connectivity, or having concerns regarding the impact of extended distance on production workloads.
Figure 11-3 illustrates another variation of this scenario, in which the primary data center is a campus location with separate machine rooms or buildings, each with the ability to run production workloads.

Figure 11-3 A 2-site solution: Campus and Recovery site
In the past, clients often used the bunker topology (as shown in Figure 11-4) to create a solution that could provide mirroring at extended distances, but still handle a primary site failure without data loss.

Figure 11-4 Two sites and an intermediate bunker
There are several arguments against this approach:
•For guaranteed zero data loss you need a policy in which, if the mirroring stops, the production applications are also stopped. There are clients who have implemented such a policy, but it is not a common policy. If production is allowed to continue after a local mirroring failure, then zero data loss cannot be guaranteed in all situations.
•If the disaster event also affects the bunker site or affects the bunker site first, then zero data loss is again not guaranteed. If the reason for the extended distance to the recovery site was to handle regional events, then this possibility cannot be excluded.
•The networking and hardware costs of the bunker site are probably still considerable despite there being no servers present. Further investment in the availability characteristics of the primary location or in a campus-type solution in which the synchronous secondary disk subsystems can be used for production services might provide a greater return on investment for the business.
11.2.2 Multi-target and cascading topologies
Multi-target and cascading topologies are similar in terms of capabilities in that both provide a synchronous and an asynchronous copy of the production data. Certain failure scenarios are handled more simply by multi-target solutions and other scenarios by cascading solutions.
The key requirements for either topology are as follows:
•A viable recovery copy and recovery capability is available at all times in a location other than where production is running. It is possible that regulatory requirements will demand this. This requirement implies that no situations exist in which both offsite copies are compromised.
•Any single site failure will result in only at most a short outage of the replication capability between the surviving sites to ensure minimal exposure where there might be increased data loss for a second failure.
With this requirement, being able to do incremental resynchronization between any two copies of the data is extremely desirable. Not having this can result in an extended period of exposure to additional data loss in case of a second failure.
11.2.3 Four-copy solutions
Many parallels can be drawn between 4-site solutions and the 3-site solutions presented in the previous section. That is, clients are unlikely to have four discrete physical data centers, because of cost implications. In all probability, the four-copy solution is most likely to be implemented in two physical locations where each location has two “hardened” data center facilities in the one location. For example, in two adjacent buildings on a campus, or even two separate data center halls within a single building where the halls are separated by fire resistant barriers and are independently provided with power and so on.
11.2.4 Cost considerations
The third and potentially fourth locations are, in many situations, regarded as an insurance copy and as mainly providing regulatory compliance. This might imply that costs for this location are kept to an absolute minimum.
Reducing the network bandwidth to remote locations can provide significant cost savings for the overall cost of the solution. Given that a synchronous copy is already available ‘locally’, trading off the RPO versus the cost of the network might be a useful compromise especially if the times of increased RPO are during periods of batch processing or database maintenance where the transactional data loss would be smaller.
Using a disaster recovery service provider such as IBM BCRS is one method of reducing the costs of the third location, fourth location, or both. Shared hardware assets and the removal of the requirement to invest in additional physical locations can provide significant cost benefits, and with the majority of events expected to be handled in the two main locations, the disadvantages of a shared facility are reduced.
11.2.5 Operational considerations
When running in multiple locations and combining different techniques together to provide an overall solution, there can be the requirement to do synchronized actions in both regions. To facilitate this from an operational standpoint, GDPS provides a Remote Script Execution function, so that from a single point of control you are able to initiate actions in any of the individual GDPS environments that make up the overall solution.
11.3 GDPS Metro/Global Mirror 3-site solution
This section describes the capabilities and requirements of the GDPS Metro/Global Mirror 3-site (GDPS/MGM 3-site) solution.
GDPS provides two configurations for the GDPS/MGM 3-site solution:
•The first configuration is a cascading data replication solution that combines the capabilities of GDPS/PPRC and GDPS/GM. This variation is referred to as a cascaded-only GDPS/MGM 3-Site configuration.
•The second configuration is an extension of the cascaded-only GDPS/MGM 3-Site configuration that can dynamically switch between a cascaded topology and a multi-target topology as necessary to optimize recovery scenarios such as HyperSwap. This configuration combines GDPS/MTMM with GDPS/GM, and is referred to as a GDPS/MGM Multi-Target 3-Site configuration.
For both configurations, synchronous replication between a primary and secondary disk subsystem that is within a single data center, or between two data centers within metropolitan distances, is implemented with GDPS/PPRC or GDPS/MTMM.
GDPS/GM is used to asynchronously replicate data to a third disk subsystem in a recovery site that is typically out of the local metropolitan region.
Because both Metro Mirror and Global Mirror are hardware-based remote copy technologies, CKD and FB devices can be mirrored to the recovery site, which protects both z Systems and distributed system data3. For enterprises that require consistency across both distributed systems and z Systems data, GDPS/MGM provides a comprehensive three-copy data replication strategy to protect against day-to-day disruptions, while protecting critical business data and functions if there is a wide-scale disruption.
11.3.1 GDPS/MGM 3-site overview
The GDPS/MGM 3-site configuration that is shown in Figure 11-5 on page 339 is a 3-site continuous availability and DR solution. In this example, Site1 and Site2 are running an Active/Active workload (for more information see 3.2.3, “Multisite workload configuration” on page 72) and are within metropolitan distances to ensure optimal application performance. All data that is required to recover critical workloads is on disk and is mirrored. Each site is configured with sufficient spare capacity to handle failed-over workloads during a site outage.
The third site, or recovery site, can be at virtually unlimited distance from Site1 to Site2 to protect against regional disasters. Asynchronous replication is running between Site2 and the recovery site. Redundant network connectivity is installed between Site1 and the recovery site to provide continued disaster recovery protection during a Site2 disaster or a failure of the disk subsystems in Site2. For more information, see “Incremental resynchronization for GDPS/MGM 3-site” on page 339.
There is sufficient CPU capacity installed to support the R-sys. CBU is installed and GDPS will invoke CBU on z Systems to provide the additional capacity needed to support production workloads if disaster recovery is invoked.
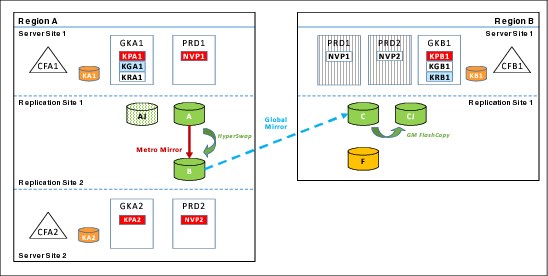
Figure 11-5 GDPS Metro Global Mirror cascaded configuration
The A disks are synchronously mirrored to the B disks in Site2 using Metro Mirror. The
B disks are then asynchronously mirrored to a third (C) set of disks in the recovery site using Global Mirror. A fourth set of disks (CJ), also in the recovery site, are the FlashCopy targets used to provide the consistent data (“journal”) for disaster recovery. A fifth (F) and optional set of disks are used for stand-alone disaster recovery testing or, in the event of a real disaster, to create a “golden” or insurance copy of the data. For more detailed information about Global Mirror, see Chapter 6, “GDPS/Global Mirror” on page 163.
B disks are then asynchronously mirrored to a third (C) set of disks in the recovery site using Global Mirror. A fourth set of disks (CJ), also in the recovery site, are the FlashCopy targets used to provide the consistent data (“journal”) for disaster recovery. A fifth (F) and optional set of disks are used for stand-alone disaster recovery testing or, in the event of a real disaster, to create a “golden” or insurance copy of the data. For more detailed information about Global Mirror, see Chapter 6, “GDPS/Global Mirror” on page 163.
Because some distance is likely to exist between the local sites, Site1 and Site2, running the PPRC leg of MGM, and the remote recovery site that is the GM recovery site, we also distinguish between the local sites and the remote site using region terminology. Site1 and Site2 are in one region, Region A, and the remote recovery site is in another region, Region B.
Incremental resynchronization for GDPS/MGM 3-site
The incremental resynchronization function of Metro Global Mirror enables incremental resynchronization between Site1 and the recovery site when the intermediate site, Site2, or the disk subsystems in the intermediate site are not available.
Without this capability, if the intermediate site becomes unavailable, the data at the recovery site starts to age because data could no longer be replicated. Instead of requiring a new Global Mirror session from the production site to the recovery site (and a full copy), incremental resynchronization capability with GDPS/MGM 3-site supports a configuration where only incremental changes must be copied from Site1 to the recovery site.
Figure 11-6 shows how GDPS/MGM 3-site can establish a Global Mirror session between the production site, Site1, and the recovery site when it detects that the intermediate site is unavailable.

Figure 11-6 GDPS Metro Global Mirror configuration after Site2 outage
After the session is established, only an incremental resynchronization of the changed data needs to be performed, which allows the disaster recovery capability to be restored in minutes, instead of hours, when the intermediate site is not available.
Figure 11-7 shows a GDPS/MGM Multi-Target 3-site configuration when it is in a multi-target topology. GDPS/MGM Multi-Target 3-site configurations can dynamically switch between a cascaded topology and a multi-target topology to optimize processing of various recovery scenarios.

Figure 11-7 GDPS/MGM Multi-Target 3-site configuration
Assume that your GDPS/MGM Multi-Site 3-Site configuration started out in a cascaded topology, as shown in Figure 11-5 on page 339. If you execute a planned HyperSwap to the B disk, followed by a reverse and resynchronization of Metro Mirror from the B disk back to the A disk, you would wind up in the multi-target topology that is shown in Figure 11-7. As shown in Figure 11-7, the B disk is now the primary copy of data that application systems are currently accessing and the A disk is the Metro Mirror secondary disk to the B disk. HyperSwap has been reenabled to provide high availability for the Region A data. This synchronous relationship is managed by GDPS/MTMM in Region A. The B disk is also the Global Mirror primary disk, being copied to the C disk that is the Global Mirror secondary disk. This asynchronous relationship is managed using GDPS/GM. Incremental resynchronization is still enabled from the A disk to the C disk to protect from a failure of the B disk and allow the Global Mirror copy to be re-established without the need for a full copy.
The advantage of the multi-target capability in this scenario is that, following the HyperSwap, Global Mirror from the B disk to the C disk can remain active and maintain your DR position, while Metro Mirror in Region A is being resynchronized from the B disk back to the A disk. In the same situation with cascaded-only MGM 3-Site, Global Mirror from the B disk to the C disk must be suspended while Metro Mirror in Region A is being resynchronized from the B disk, back to the A disk, which results in your DR position aging while Metro Mirror is being resynchronized.
GDPS/MGM Procedure Handler
The GDPS/MGM Procedure Handler is a fully integrated component of GDPS for use in 3-site IR or 4-site configurations. The Procedure Handler, along with the provided procedures, can be used to drive several complex scenarios with a single script invocation, as shown in the following examples:
•To incrementally reintroduce the Site2 intermediate disk if GM had been incrementally resynchronized from Site1 to the recovery site.
A supplied procedure provides the ability to return to an A-B-C configuration when running in an A-C configuration. Without the procedure, returning to an A-B-C configuration would have required full initial copy for both PPRC (A-disk to B-disk) and for GM (B-disk to C-disk). Thus, the procedure provides significant availability and disaster recovery benefit for IR environments.
The procedure can be used for this purpose only if the B-disk is returned “intact,” meaning that metadata on the disk subsystem pertaining to its status as a PPRC secondary and GM primary disk is still available. If you need to introduce a new disk subsystem into the configuration, this is going to require full initial copy of all the data.
•To perform a planned toggle between the A-disk and the B-disk.
If you intend to perform periodic “flip/flops” of Site1 and Site2 (or A-disk and B-disk), another procedure allows you to go from an A-B-C configuration to a B-A-C configuration and then back to an A-B-C configuration in conjunction with A-disk to B-disk planned HyperSwap and B-disk to A-disk planned HyperSwap.
•To incrementally “return home” after recovering production on C-disk, or after you have switched production to C-disk by reintroducing both the A-disk and the B-disk.
This is a C to A-B-C (or B-A-C) transformation. It assumes that both the A-disk and the B-disk are returned intact. Although the MGM mirror can be incrementally reinstated, a production outage is necessary to move production from running on the C-disk in the recovery site back to either the A-disk or the B-disk in one of the local sites.
The Procedure Handler supports only CKD disks. Incremental Resynchronization is not supported with GDPS/PPRC HM.
11.3.2 GDPS/MGM Site1 failures
The primary role of GDPS is to protect the integrity of the B copy of the data. At the first indication of a failure in Site1, GDPS/PPRC or GDPS/MTMM will freeze all B disks, both CKD and FB, to prevent logical contamination of data that is on the B devices. For more information about GDPS/PPRC processing, see Chapter 3, “GDPS/PPRC” on page 53.
At this point, the GDPS/GM session between Site2 and the recovery site is still running, and both locations most likely will have the same set of data after a brief amount of time. The business focus is now on restarting the production systems in either Site2 or the recovery site, depending on the failure scenario. If the systems are started in Site2, the GDPS/GM solution is already in place.
11.3.3 GDPS/MGM Site2 failures
In this situation, the production systems are still running, so the business requirement is to ensure that disaster recovery capabilities are restored as fast as possible. The GDPS/GM session should be restarted as soon as possible between Site1 and the recovery site using incremental resynchronization. See “Incremental resynchronization for GDPS/MGM 3-site” on page 339 for more details. If incremental resynchronization is not configured, a full copy is required.
This scenario has possibly less impact to the business than a failure of the production site, but this depends on the specific environment.
11.3.4 GDPS/MGM region switch and return home
It is possible to switch production from running in Region A (in either Site1 or Site2) to Region B. Many GDPS/MGM 3-site customers run Site1 and Site2 in the same physical site or on a campus where these two sites are separated by little distance. In such configurations, there might be planned outage events, such as complete power maintenance, that are likely to affect both sites.
Similarly, an unplanned event that impacts both sites will force recovery in Region B.
While production runs in Region B, the disk subsystems in this region track the updates that are made. When Region A is available again, assuming that all disks configured in the region come back intact, it is possible to return production back to Region A using the appropriate supplied procedure without requiring fully copying the data back. Because the updates have been tracked, only the data that changed while Region A was down are sent back to the Region A disks to bring them up to date. Then production is shut down in Region B. The final updates are allowed to be drained to Region A and production can then be restarted in Region A.
Because Region A and Region B are not symmetrically configured, the capabilities and levels of protection offered when production runs in Region B will be different. Most notably, because there is no PPRC of the production data in Region B, there is no HyperSwap protection to provide continuous data access. For the same reason, the various operational procedures for GDPS will also be different when running in Region B. However, even if no outage is planned for Region A, switching production to Region B periodically (for example, once or twice a year) and running live production there for a brief period of time is the best form of disaster testing because it will provide the best indication of whether Region B is properly configured to sustain real, live production workloads.
11.3.5 Scalability in a GDPS/MGM 3-site environment
As described in “Addressing z/OS device limits in GDPS/PPRC and GDPS/MTMM environments” on page 25, GDPS/PPRC allows defining the PPRC secondary devices in alternate subchannel set 1 (MSS1), which allows up to nearly 64 K devices to be mirrored in a GDPS/PPRC configuration. The definitions of these devices are in the application site I/O definitions.
Similarly, “Addressing z/OS device limits in a GDPS/GM environment” on page 34 describes how GM allows defining the GM FlashCopy target devices in alternate MSS1 in the recovery site I/O definitions and not defining the practice FlashCopy target devices at all to the GDPS/GM R-sys, again, allowing up to nearly 64 K devices to be mirrored in a GDPS/GM configuration.
In a GDPS/MGM 3-site environment where the PPRC secondary devices defined in MSS1 are the GM primary devices, there is additional support in GDPS/GM that allows the GM primary devices to be defined in MSS1. With the combined alternate subchannel set support in GDPS/PPRC (or GDPS/MTMM) and GDPS/GM, up to nearly 64 K devices can be replicated using the MGM technology.
11.3.6 Other considerations in a GDPS/MGM 3-site environment
With Global Mirror, deliberately underconfiguring the bandwidth provided to reduce the total cost of the solution is possible. If significant peaks exist, then this cost savings might be considerable because the network costs are often a significant portion of ongoing costs. The drawback with under-configuring bandwidth can be that this could affect the recovery point that can be achieved. If a disaster affects the entire production region, both Site1 and Site2, during any peak when the GM mirror is running behind, there is likely to be more data loss.
11.3.7 Managing the GDPS/MGM 3-site environment
GDPS provides a range of solutions for disaster recovery and continuous availability in a z Systems-centric environment. GDPS/MGM 3-site provides support for Metro Global Mirror within a GDPS environment. GDPS builds on facilities provided by System Automation and NetView and uses inband connectivity to manage the Metro Global Mirror relationships.
GDPS/MGM 3-site runs two services to manage Metro Global Mirror, both of which run on z/OS systems, as explained here:
•GDPS/PPRC (or GDPS/MTMM) services run on every z/OS image in the production sysplex and the controlling systems, K1 and K2, in Site1 and Site2. Each controlling system is allocated on its own non-mirrored disk and has access to the primary and secondary disk subsystems.
During normal operations, the master function runs in the controlling system located where the secondary disks reside. This is where the day-to-day management and recovery of the PPRC mirroring environment is performed. If Site1 or Site2 fails, the Master system manages the recovery of the PPRC disks and production systems.
•The second controlling system is an alternate that takes over the master function if the Master controlling system becomes unavailable or a Master switch takes place as result of, for example, a HyperSwap.
The GDPS/GM services run in the Kg and R-sys controlling systems. Kg runs in the production sysplex and is responsible for controlling the Global Mirror environment and sending information to the R-sys running in the recovery site. The R-sys is responsible for carrying out all recovery actions during a wide-scale disruption that affect both Site1 and Site2.
In addition to managing the operational aspects of Global Mirror, GDPS/GM provides facilities to restart z Systems production systems in the recovery site. By providing scripting facilities, it provides a complete solution for the restart of a z Systems environment in a disaster situation without requiring expert manual intervention to manage the recovery process.
GDPS supports both z Systems and distributed systems devices in a cascaded-only GDPS/MGM 3-Site environment. Only z systems devices are supported in a GDPS/MGM Multi-Target 3-site environment.
11.3.8 Flexible testing in a GDPS/MGM 3-site environment
To facilitate testing of site failover and failback processing, consider installing additional disk capacity to support FlashCopy in Site1 and Site2. The FlashCopy can be used at both Site1 and Site2 to maintain disaster recovery checkpoints during remote copy resynchronization. This ensures there is a consistent copy of the data available if a disaster-type event should occur while testing your site failover and failback procedures. In addition, the FlashCopy could be used to provide a copy to be used for testing or backing up data without the need for extended outages to production systems.
GDPS/MGM 3-site supports an additional FlashCopy disk device, referred to as F disks. These are additional FlashCopy target devices that might optionally be created in the recovery site. The F disks might be used to facilitate stand-alone testing of your disaster recovery procedures while the Global Mirror environment is running. This ensures that a consistent and current copy of the data is available at all times. In addition, the F disk can be used to create a “gold” or insurance copy of the data if a disaster situation occurs.
Currently, GDPS/MGM 3-site supports the definition and management of a single F device for each Metro-Global Mirror triplet (B, C, and CJ disk combinations) in the configuration. To reduce management and operational complexity, support exists in GDPS/GM to support the F disk without adding a requirement for these disks to be defined to the I/O configurations of the GDPS systems managing them. Known as “No UCB” FlashCopy, this support allows for the definition of F disks without the need to define additional UCBs to the GDPS management systems.
In addition to the ability to test on the F disks, GDPS/MGM 3-site configurations also support testing using X-disk support in GDPS/GM as described in 6.7.2, “Creating a test copy using GM CGPause and testing on isolated disks” on page 184.
11.3.9 GDPS Query Services in a GDPS/MGM 3-site environment
GDPS/PPRC provides Query Services, allowing you to query various aspects of the PPRC leg of a GDPS/MGM 3-site environment. Similarly, GDPS/GM provides Query Services, allowing you to query various aspects of the GM leg of a GDPS/MGM 3-site environment.
The GDPS/GM query services also have awareness of the fact that a particular environment is a GDPS/MGM 3-site environment enabled for Incremental Resynchronization (IR) and returns additional information pertaining to the IR aspects of the environment. In a GM environment, at any time, the GM session could be running from Site2 to the recovery site (B disk to C disk) or from Site1 to the recovery site (A disk to C disk). If GM is currently running B to C, this is the Active GM relationship and the A to C relationship is the Standby GM relationship. The GM query services in an MGM 3-site IR environment return information about both the active and the standby relationships for the physical and logical control units in the configuration and the devices in the configuration.
11.3.10 Prerequisites for GDPS/MGM 3-site
GDPS/MGM 3-site has the following prerequisites:
•GDPS/PPRC or GDPS/PPRC HM is required for cascaded-only GDPS/MGM 3-Site. If GDPS/PPRC HM is used, the Incremental Resynchronization function is not available. GDPS/MTMM is required for GDPS/MGM Multi-Target 3-Site.
•GDPS/GM is required and the GDPS/GM prerequisites must be met.
•Consult with your storage vendor to ensure that the required features and functions are supported on your disk subsystems.
|
Important: For the latest GDPS prerequisite information, see the GDPS product website:
|
11.3.11 GDPS/Active-Active disk replication integration with GDPS/MGM
It is possible to use cascaded-only GDPS/MGM 3-Site to provide local high availability and remote disaster recover for the sysplexes that run GDPS/Active-Active workloads. For such an environment, GDPS/Active-Active provides special facilities to manage the disk replication aspects of specific planned and unplanned scenarios using the GDPS/Active-Active Controller system as the single point of control. For more information, see 8.6, “GDPS/Active-Active disk replication integration” on page 267 for details.
This support is not provided with GDPS/MGM Multi-Target 3-Site.
11.4 GDPS Metro/Global Mirror 4-site solution
GDPS provides two configurations for the GDPS/MGM 4-site solution:
•The first configuration is an extension to the cascaded-only 3-site configuration described in “GDPS Metro/Global Mirror 3-site solution” on page 338, in that it is a cascaded configuration made up of a combination of GDPS/PPRC and GDPS/GM. This variation is referred to as a cascaded-only GDPS/MGM 4-Site configuration.
•The second configuration is an extension of the multi-target 3-Site configuration also described in “GDPS Metro/Global Mirror 3-site solution” on page 338, in that it can dynamically switch between a cascaded topology and a multi-target topology as necessary to optimize recovery scenarios such as HyperSwap. This configuration combines GDPS/MTMM with GDPS/GM, and is referred to as a GDPS/MGM Multi-Target 4-site configuration.
The critical difference between the 3-site configurations and the 4-site configurations, is that with the two GDPS/MGM 4-site configurations, a second copy of data is available in the recovery region that can provide a high-availability (HA) copy if you perform either a planned or unplanned switch of production to the recovery region. These 4-site configurations can also be described as symmetrical 4-site configurations because the same capabilities, from a data high-availability perspective, are available whether you are running your production services in Region A or Region B.
This fourth copy of data is created using non-synchronous Global Copy (also known as PPRC-XD) that can be switched to synchronous-mode during a planned or unplanned region switch, thus providing the HA copy in that region.
Figure 11-8 shows a cascaded-only MGM 4-site configuration that consists of the four copies of data, labeled A, B, C, and D. The Global Mirror FlashCopy target device (or “journal device”) is shown in Figure 11-8 as CJ.

Figure 11-8 Cascaded-only GDPS/MGM 4-site configuration
In Figure 11-8, which shows a steady state when running in Region A, the A disk is the primary copy of data that application systems are currently accessing. The B disk is the Metro Mirror secondary disk to the A disk, and HyperSwap is enabled to provide high availability for the Region A data. This relationship is managed by GDPS/PPRC in Region A. The B disk is also the Global Mirror primary disk, being copied to the C disk that is the Global Mirror secondary disk. This is managed using GDPS/GM. Incremental resynchronization is also enabled from the A disk to the C disk to protect from a failure of the B disk and allow the Global Mirror copy to be re-established without the need for a full copy. This, as you see, is the same as a 3-site configuration. Where it differs is that the D disk is present and is a Global Copy secondary to the C disk. This relationship, which is managed by GDPS/PPRC running in Region B, can be converted to fully synchronous Metro Mirror when you perform a switch of production to Region B for whatever reason. This is referred to as an A-B-C-D configuration.
If you switch production to Region B, you then use the C disk as the primary copy, with the D disk now being the Metro Mirror secondary, and GM primary disk and the A disk are the GM secondaries. The B disks are then the Global Copy secondary disk to the A disk. This is referred to as a C-D-A-B configuration.
Figure 11-9 depicts a GDPS/MGM Multi-Target 4-site configuration when it is in a multi-target topology. As previously stated, GDPS/MGM Multi-Target 4-site configurations can dynamically switch between a cascaded topology and a multi-target topology to optimize processing of various recovery scenarios.

Figure 11-9 GDPS/MGM Multi-Target 4-site configuration
Assume that your GDPS/MGM Multi-Site 4-Site configuration started out in a cascaded topology as depicted in Figure 11-8 on page 347. If you execute a planned HyperSwap to the B disk, followed by a reverse and resynchronization of Metro Mirror from the B disk back to the A disk, you would wind up in the multi-target topology depicted in Figure 11-9. In the figure, the B disk is now the primary copy of data that application systems are currently accessing and the A disk is the Metro Mirror secondary disk to the B disk. HyperSwap has been reenabled to provide high availability for the Region A data. This relationship is managed by GDPS/MTMM in Region A. The B disk is also the Global Mirror primary disk, being copied to the C disk that is the Global Mirror secondary disk. This is managed using GDPS/GM. Incremental resynchronization is still enabled from the A disk to the C disk to protect from a failure of the B disk and allow the Global Mirror copy to be re-established without the need for a full copy. Finally, in Region B, the D disk is a Global Copy secondary to the C disk. Again, this relationship, which is managed by GDPS/MTMM running in Region B, can be converted to fully synchronous Metro Mirror when you perform a switch of production to Region B for whatever reason.
The advantage of the multi-target capability in this scenario is that, following the HyperSwap, Global Mirror from the B disk to the C disk can remain active, maintaining your DR position, while Metro Mirror in Region A is being resynchronized from the B disk back to the A disk. In the same situation with cascaded-only MGM 4-Site, Global Mirror from the B disk to the C disk must be suspended while Metro Mirror in Region A is being resynchronized from the B disk, back to the A disk, resulting in your DR position aging while Metro Mirror is being resynchronized.
The MGM 4-site configurations, as mentioned, remove the single point of failure of disk when you switch to the recovery region. As with GDPS/MGM 3-site, precoded procedures are provided by GDPS to manage the following scenarios in the 4-site environments:
•Moving the GM session if there is an intermediate disk subsystem failure.
•Reintroduction of the intermediate disk subsystem.
•Planned Region switch to move production to the opposite region.
However, several additional considerations exist for an MGM 4-site configuration over those previously mentioned for MGM 3-site configurations:
•DR testing can be done on the D disk (when production is in Region A) without affecting your DR position.
•Managing devices defined in an alternate subchannel set is not supported.
•The use of asymmetric devices in the remote copy configuration is not supported.
•The use of X-disk for creating a test copy is not supported (it is not required, because testing can be done on the D disk or B disk, depending on the region where production is currently running).
•Use of GDPS/PPRC HM is not supported in a 4-site configuration because the Incremental Resynchronization function is required.
11.4.1 Benefits of a GDPS/MGM 4-site configuration
You can probably see that in effect, a 4-site configuration is managed as two somewhat separate 3-site MGM configurations, where the fourth copy is most relevant when you perform a region switch, or when you want to perform a DR test. The key advantages of a 4-site MGM configuration can be summarized as follows:
•HA capability when running production in either region.
•Retention of DR capability following a region switch. In a 3-site MGM configuration your DR position ages while running on the C-disk.
•Nearly identical operational procedures when running in either region.
11.5 GDPS Metro z/OS Global Mirror 3-site solution
This section describes the capabilities and requirements of the GDPS Metro/z/OS Global Mirror (GDPS/MzGM) solution.
GDPS Metro/z/OS Global Mirror is a multi-target data replication solution that combines the capabilities of GDPS/PPRC and GDPS/XRC.
GDPS/PPRC or GDPS/PPRC HyperSwap Manager is used to manage the synchronous replication between a primary and secondary disk subsystem located either within a single data center, or between two data centers located within metropolitan distances.
GDPS/XRC is used to asynchronously replicate data from the primary disks to a third disk system in a recovery site, typically out of the local metropolitan region. Because z/OS Global Mirror (XRC) supports only CKD devices, only z Systems data can be mirrored to the recovery site.
For enterprises that want to protect z Systems data, GDPS/MzGM delivers a three-copy replication strategy to provide continuous availability for day-to-day disruptions, while protecting critical business data and functions during a wide-scale disruption.
11.5.1 GDPS/MzGM overview
The solution that is shown in Figure 11-10 is an example of a 3-site GDPS/MzGM continuous availability and DR implementation. In this example, Site1 and Site2 are running an Active/Active workload (see 3.2.3, “Multisite workload configuration” on page 72) and located within metropolitan distances to ensure optimal application performance. All data that is required to recover critical workloads is resident on disk and mirrored. Each site is configured with sufficient spare capacity to handle failover workloads if there is a site outage.

Figure 11-10 GDPS z/OS Metro Global Mirror
The third or recovery site can be located at a virtually unlimited distance from Site1 and Site2 locations to protect against regional disasters. Because of the extended distance, GDPS/XRC is used to asynchronously replicate between Site1 and the recovery site.
Redundant network connectivity is installed between Site2 and the recovery site to provide continued data protection and DR capabilities during a Site1 disaster or a failure of the disk subsystems in Site1. For more information, see “Incremental resynchronization for GDPS/MzGM” on page 351. Sufficient mainframe resources are allocated to support the SDMs and GDPS/XRC controlling system. In a disaster situation, GDPS invokes CBU to provide the additional capacity needed for production workloads.
The A disks are synchronously mirrored to the B disks in Site2 using Metro Mirror. In addition, A disks are asynchronously mirrored to a third (C) set of disks in the recovery site using z/OS Global Mirror (XRC). An optional, and highly recommended, fourth (F) set of disks in the recovery site is used to create FlashCopy of the C disks. These disks can then be used for stand-alone disaster recovery testing, or in a real disaster, to create a “gold” or insurance copy of the data. For more information about z/OS Global Mirror, see Chapter 5, “GDPS/XRC” on page 137.
Because some distance is likely to exist between the local sites, Site1 and Site2, running the PPRC leg of MzGM, and the remote recovery site, which is the XRC recovery site, we also distinguish between the local sites and the remote site using Region terminology. Site1 and Site2 are in one region, Region A and the remote recovery site is in another region, Region B.
Incremental resynchronization for GDPS/MzGM
With the incremental resynchronization (IR) function of Metro z/OS Global Mirror, you should be able to move the z/OS Global Mirror (XRC) primary disk location from Site1 to Site2 or vice versa without having to perform a full initial copy of all data.
Without incremental resynchronization, if Site1 becomes unavailable and the PPRC primary disk is swapped to Site2, the data at the recovery site starts to age because updates are no longer being replicated. The disaster recovery capability can be restored by establishing a new XRC session from Site2 to the recovery site. However, without incremental resynchronization, a full copy is required and this could take several hours or even days for significantly large configurations. The incremental resynch allows restoring the XRC mirror using the Site2 disks as primary and sending to the recovery site only the changes that have occurred since the PPRC disk switch.
Figure 11-11 shows how GDPS/MzGM can establish a z/OS Global Mirror session between Site2 and the recovery site when it detects that Site1 is unavailable.

Figure 11-11 GDPS Metro z/OS Global Mirror configuration after Site1 outage
After the session is established, only an incremental resynchronization of the changed data needs to be performed, thus allowing the disaster recovery capability to be restored in minutes, instead of hours, when the intermediate site is not available. GDPS can optionally perform this resynchronization of the XRC session using the swapped-to disks totally automatically, requiring no operator intervention.
11.5.2 GDPS/MzGM Site1 failures
At the first indication of a failure, GDPS will issue a freeze command to protect the integrity of the B copy of the disk. For a more detailed description of GDPS/PPRC processing, see Chapter 3, “GDPS/PPRC” on page 53.
If the freeze event were part of a larger problem in which you could no longer use the A-disk or Site1, you must recover the B-disk and restart production applications using the B-disk. After the production systems are restarted, the business focus will be on establishing z/OS Global (XRC) mirroring between Site2 and the recovery site as soon as possible. You can perform incremental resynchronization from the B-disk to the C-disk and maintain disaster recovery readiness.
If the failure was caused by a primary disk subsystem failure, and Site1 systems are not impacted, GDPS/PPRC will use HyperSwap to transparently switch all systems in the production sysplex to the secondary disks in Site2, and the production systems will continue to run. In this case also, GDPS can perform incremental resynchronization from the B-disk to the C-disk and maintain disaster recovery readiness.
11.5.3 GDPS/MzGM Site2 failures
In this situation, the production systems in Site1 will continue to run and replication to the remote site is still running. GDPS, based on user-defined actions, will restart Site2 production systems in Site1. No action is required from an application or disaster recovery solution perspective. This scenario has less impact to the business than a failure of the Site1 location. When Site2 is recovered, if the disks have survived, an incremental resynchronization can be initiated to resynchronize the A and B disks.
11.5.4 GDPS/MzGM region switch and return home
It is possible to switch production from running in Region A (in either Site2 or Site2) to Region B. Many GDPS/MzGM customers run Site1 and Site2 in the same physical site or on a campus where these two sites are separated by little distance. In such configurations there could be planned outage events, such as complete power maintenance, that is likely to affect both sites.
Similarly, an unplanned event that impacts both sites will force recovery in Region B.
When Region A is available again, assuming that all disks configured in the region come back intact, it is possible to return production to Region A using a step-by-step procedure provided by GDPS to accomplish this return home operation.
To move data back to Region A, the z/OS Global Mirror (XRC) remote copy environment must be designed to allow the mirroring session to be reversed. Production will be running in Region B, and Region A will need to run the GDPS/XRC SDM systems. This means you need to ensure that the proper connectivity and resources are configured in both regions to allow them to assume the recovery region role.
Because Region A and Region B are not symmetrically configured, the capabilities and levels of protection offered when production runs in Region B will be different. Most notably, because there is no PPRC of the production data in Region B, there is no HyperSwap protection to provide continuous data access. For the same reason, the various operational procedures for GDPS will also be different when running in Region B.
However, even if no outage is planned for Region A, switching production to Region B periodically (for example, once or twice a year) and running live production there for a brief period of time is the best form of disaster testing because it will provide the best indication of whether Region B is properly configured to sustain real, live production workloads.
11.5.5 Management of the GDPS/MzGM environment
GDPS/MzGM provides management functions for a Metro/z/OS Global Mirror in a GDPS environment. The GDPS/PPRC management functions described in 11.3.7, “Managing the GDPS/MGM 3-site environment” on page 344, are also provided by GDPS/MzGM.
GDPS/XRC services run on the Kx controlling system in the recovery site along with the SDM systems. The SDM and Kx systems must be in the same sysplex. The Kx controlling system is responsible for managing the z/OS Global Mirror (XRC) remote copy process and recovering the production systems if a disaster occurs. It does not detect what is happening in Site1 and Site2.
If a wide-scale disruption that impacts both Site1 and Site2 occurs, the operator must initiate the recovery action to restart production systems in the recovery site. At this point, the Kx system activates the production LPARs and coupling facilities, and is able to respond to certain z/OS initialization messages. However, it cannot automate the complete start of the production systems. For this, the K1 or K2 systems can be used to automate the application start and recovery process in the production sysplex.
11.5.6 Flexible testing of the GDPS/MzGM environment
To facilitate testing of site failover and failback processing, consider installing additional disk capacity to support FlashCopy in Site1 and Site2. The FlashCopy can be used at both sites to maintain disaster recovery checkpoints during remote copy resynchronization. This ensures that a consistent copy of the data will be available if a disaster-type event should occur while testing your site failover and failback procedures. In addition, the FlashCopy could be used to provide a copy to be used for testing or backing up data without the need for extended outages to production systems.
By combining z/OS Global Mirror with FlashCopy, you can create a consistent point-in-time tertiary copy of the z/OS Global Mirror (XRC) data sets and secondary disks at your recovery site. The tertiary devices can then be used to test your disaster recovery and restart procedures while the GDPS/XRC sessions between Site1 and the recovery site are running, which ensures that disaster readiness is maintained at all times. In addition, these devices can be used for purposes other than DR testing; for example, nondisruptive data backup, data mining, or application testing.
With the addition of GDPS/XRC Zero Suspend FlashCopy, enterprises are able to create the tertiary copy of the z/OS Global Mirror (XRC) data sets and secondary disks without having to suspend the z/OS Global Mirror (XRC) mirroring sessions. This GDPS function prevents the SDM from writing new consistency groups to the secondary disks while FlashCopy is used to create the tertiary copy of the disks.
The time to establish the FlashCopies will depend on the number of secondary SSIDs involved, the largest number of devices in any SSID, and the speed of the processor. Zero Suspend FlashCopy will normally be executed on the GDPS K-system in the recovery site, where there should be limited competition for CPU resources.
Because SDM processing is suspended while FlashCopy processing is occurring, performance problems in your production environment might occur if the SDM is suspended too long. For this reason, Zero Suspend FlashCopy should be evaluated by testing on your configuration, under different load conditions, to determine whether this facility can be used in your environment.
For enterprises that have requirements to test their recovery capabilities and maintain the currency of the replication environment, you will need to provide additional disk capacity to support FlashCopy. By providing an additional usable copy of the data, you have the flexibility to perform on-demand DR testing and other nondisruptive activities, while maintaining up-to-date DR readiness.
11.5.7 Prerequisites for GDPS/MzGM
GDPS MzGM has the following prerequisites:
•GDPS/PPRC or GDPS/PPRC HM is required.
•GDPS/XRC is required and the GDPS/XRC prerequisites must be satisfied.
•Consult with your storage vendor to ensure required features and functions are supported on your disk subsystems.
|
Important: For more information about the latest GDPS prerequisites, see the following GDPS product website:
|
11.6 GDPS Metro z/OS Global Mirror 4-site solution
A GDPS/MzGM 4-site configuration is an extension to the 3-site configuration described in the previous section. The critical difference from the 3-site configuration is that in the recovery region, a second copy of data is available that can provide a high-availability (HA) copy if you perform either a planned or unplanned switch of production to the recovery region. This can also be described as a symmetrical 4-site configuration because the same capabilities, from a data high-availability perspective, are available whether you are running your production services in Region A or Region B.
This fourth copy of data is created using synchronous PPRC and managed by GDPS/PPRC, thus providing the HA copy in that region.
Figure 11-12 shows a 4-site configuration consisting of the four copies of data, labeled A1, A2, B1, and B2.

Figure 11-12 GDPS/MzGM 4-site configuration
In the figure, which shows a steady state when running in Region A, the A1 disk is the primary copy of data that application systems are currently accessing. The A2 disk is the Metro Mirror secondary disk to the A1 disk, and HyperSwap is enabled to provide high availability for the Region A data. This relationship is managed by GDPS/PPRC in Region A. The A1 disk is also the XRC primary disk, being copied to the B1 disk that is the XRC secondary disk. This is managed using GDPS/XRC. Incremental resynchronization is also enabled from the A2 disk to the B1 disk to allow the XRC session to be re-established, without the need for a full copy, in the event of a planned or unplanned HyperSwap in Region A.
This, as you see, is the same as a 3-site configuration. Where it differs is that the B2 disk is present and is a PPRC (aka Metro Mirror) secondary disk to the B1 disk. This relationship, which is managed by GDPS/PPRC running in Region B, is kept in a fully synchronous Metro Mirror state so that when you perform a switch of production to Region B for whatever reason, you are immediately protected by HyperSwap.
If you switch production to Region B, you then use the B1 disk as the primary copy, with the B2 disk now being the Metro Mirror secondary. The B1 disk is also the XRC primary disk with the A1 disk being the XRC secondary disk. The A2 disks are then the Metro Mirror secondary disk to the A1disk.
Several other considerations exist for an MzGM 4-site configuration over those previously mentioned for MzGM 3-site configurations:
•DR testing can be done on the B2 disk (when production is in Region A) without affecting your DR position.
•Use of GDPS/PPRC HM is not supported in a 4-site configuration.
•xDR management for Native Linux on z Systems is not supported in a 4-site configuration.
•Managing XRC on behalf of multiple GDPS/PPRC environments is not supported in a 4-site configuration.
11.6.1 Benefits of a GDPS/MzGM 4-site configuration
You can probably see that, in effect, a 4-site configuration is managed as two somewhat separate 3-site MzGM configurations, where the fourth copy is most relevant when you perform a region switch, or when you want to perform a DR test. The key advantages of a 4-site MzGM configuration can be summarized as follows:
•HA capability when running production in either region
•Nearly identical operational procedures when running in either region
1 Incremental Resynchronization of GDPS/GM and management of four copy configurations are not supported in conjunction with GDPS/PPRC HM.
2 Incremental Resynchronization of GDPS/GM and management of four copy configurations are not supported in conjunction with GDPS/PPRC HM.
3 This capability is available with the cascaded-only GDPS/MGM 3-Site configuration only.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.