
8
Electrostrictive Polymer Nanocomposites: Fundamental and Applications
Shenghong YAO and Jinkai YUAN
Centre de Recherche Paul Pascal, CNRS – University of Bordeaux, Pessac, France
8.1. Introduction
All dielectric materials have electroactivity, that is, the ability to changing their dimension or shape in response to an applied electric field (Dang et al. 2012). The electroactive polymer (EAP) and its polymer nanocomposites are particularly interesting for applications that range from actuators or sensors to generators, due to their low moduli, high strain capabilities and the ease of processing at low cost and customizable electromechanical coupling properties.
Generally, EAPs have the ability to induce strains that are two orders of magnitude greater than the rigid and fragile electroactive ceramics. They show higher response speed as compared with the shape memory alloys and polymers (Yuan et al. 2019). Because of these features, EAPs can be strongly comparable to biological muscles and have been long named “artificial muscles” (Bar-Cohen 2002). A challenge to the community has even been made: to develop a robotic arm actuated by artificial muscles to win an arm wrestling match against a human opponent.
In addition to actuators, EAPs have also revealed their potential in sensory applications such as haptic sensing, blood pressure and pulse rate monitoring and chemical sensing (Wang et al. 2016). Furthermore, EAPs even act as key active materials in generators. With ever-increasing functionalities of portable electronics (e.g. wireless sensors and transmitters) and wireless micro-systems, their energy requirements have been dramatically elevated. The use of batteries is troublesome due to the environmental concern and limited lifespan, necessitating their periodic replacement. The obvious solution to this challenge is to develop self-powered systems that completely rely on the energy harvested from the human body or the ambient environment. EAPs have been demonstrated to be able to scavenge vibrational mechanical energy (Lallart et al. 2012) and ocean wave energy (Jean et al. 2012).
EAPs can be divided into different subgroups based on the crystal class (i.e. centrosymmetric or non-centrosymmetric) that they belong to. As a dielectric material with a center of symmetry is stimulated by an electric field, the symmetry will cancel the movements of cations and anions and does not lead to a net deformation in the crystal. Nevertheless, the chemical bonds are not harmonic and the anharmonicity of the bonds gives rise to second-order effects resulting in a small amount of net deformation of the lattice (Vijaya 2013). The deformation is found to be proportional to the square of the electric field and independent of the direction of the field. This effect is called electrostriction. Because such an anharmonic effect exists in all dielectrics, all dielectrics are electrostrictive materials.
On the other hand, as a non-centrosymmetric dielectric material is subjected to an external electric field, the asymmetric movement of the neighboring ions results in much more significant deformation of the crystal. Such deformation dominates the net deformation induced by the anharmonicity of the chemical bonds (Vijaya 2013). Moreover, it is linearly proportional to the magnitude of the electric field. Reversing the applied field will change the direction of deformation. These materials are called piezoelectrics. A detailed classification of electroactive (dielectric) materials is shown in Figure 8.1.
In this chapter, we focus on electrostrictive polymeric materials. The fundamental issues and promising applications will be addressed. The recent progress toward giant-electrostriction EAPs in the field will be reviewed and some long-standing challenges for their practical applications will be also discussed.
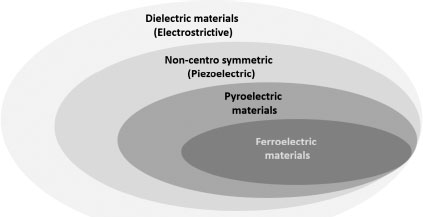
Figure 8.1. Classification of dielectric materials
8.2. Electrostriction relations
Electrostriction represents the ability of materials to change their dimensions in response to an applied electric stimulus. As previously mentioned, it is present in all materials, regardless of the symmetry. It is generally defined as a quadratic coupling between strain (Sij) and polarization (Pm) (Damjanovic 1998; Lallart et al. 2012).
where Qijki and Qklmn are the polarization-related electrostriction coefficients, ![]() is the elastic compliance, Tkl is the stress, Em is the electric field and
is the elastic compliance, Tkl is the stress, Em is the electric field and ![]() is the inverse of the linear dielectric permittivity.
is the inverse of the linear dielectric permittivity.
The polarization P that is induced in a polarizable material by an applied electric field vector E is given by:
where χ is the second-rank tensor, known as the dielectric susceptibility of the material. This relation is valid only for linear materials or in a linear limit for nonlinear materials. The dielectric susceptibility χ is a proportionality constant that describes the degree of polarization of a dielectric material in response to an applied electric field. The greater the dielectric susceptibility, the greater the polarization of a material in response to a given field, and therefore more significant reduction of the total electric field inside the material. The dielectric susceptibility can be expressed as
where ε0 = 8.854 × 10–12 F m–1 is the dielectric permittivity of free space and εr is the relative dielectric permittivity of the material. Combining equations [8.3] and [8.4] with [8.1], we get
where ![]() is the elastic compliance under constant electric field, Mijkl is the electric field-related electrostriction coefficient and it relates with Qijmn by
is the elastic compliance under constant electric field, Mijkl is the electric field-related electrostriction coefficient and it relates with Qijmn by
On the other hand, the total surface charge density that is induced in the materials by the applied field is given by the dielectric displacement vector Di,
Combining with equation [8.3], one can deduce

where εij is the dielectric permittivity of the material and δij is Kronecker’s symbol.
For most of the ferroelectric materials, ε0δij ≪ χij, therefore εij ≈ χij (Damjanovic 1998). On the basis of above equations, we can obtain
where ![]() is the linear dielectric permittivity of materials under constant mechanical stress.
is the linear dielectric permittivity of materials under constant mechanical stress.
8.3. Determination of the electrostriction coefficient
Experimental determination of the electrostriction coefficient M is typically performed in the actuator mode. The polymer samples are coated with conducting metallic or organic layers on the two opposite surfaces to form a sandwiched capacitor structure. The electrostriction coefficient is therefore characterized by measuring the induced thickness variation under certain magnitudes of high electrical field. In this case, the global strain S is the sum of two distinct contributions, that is, SE and SMax. The former, SE, corresponds to the true electrostriction that originates from direct coupling between the polarization and mechanical response, while the latter, SMax, is a result of Maxwell stress that originates from the Coulomb interaction between oppositely-charged compliant electrodes. Therefore, the apparent electrostriction coefficient, Mapp, is given by
Plenty of previous research has evaluated the electrostriction coefficients of various EAPs based on the actuator method. For example, Wongtimnoi et al. (2011) studied the electrostrictive properties of a polyether-based polyurethane (PU) elastomer and its corresponding composites filled with conductive carbon black (CB) by measuring the thickness strain induced by external electric fields (Figure 8.2). Near the percolation threshold, the composite demonstrated an electrostriction coefficient as high as –1.2 × 10-14 m2/V2 Park et al. (2008) reported a novel electroactive single-walled carbon nanotube (SWNT)–polyimide composite. This composite intrinsically forms a unimorph during the fabrication process in order to actuate bending deformation in response to an applied electric field. A strain of 2.6% can be obtained at low driving voltages (<1 MV/m). It was claimed that such strong actuation capabilities of the EAPs were gained from the incorporation of SWNTs into these polymers. The electrostriction coefficients (M33) of the EAP composites were estimated from –3.8 × 10–15 to –1.2 × 10–13 m2/V2. The high end of these values represent the state of the art.
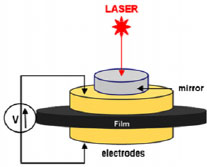
Figure 8.2. A sandwiched structure used to evaluate the electrostrictive coefficient by measuring the thickness variation in response to the electric field (Wongtimnoi et al. 2011). © 2011, Elsevier. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
The actuator approach can be easily implemented experimentally and is highly efficient to characterize the global electrostriction. Nevertheless, it necessitates the application of a voltage of about several hundred volts. At high voltage, assumptions are needed to determine whether the deformation is dominated by true electrostriction or by the Maxwell stress (Figure 8.3). In practice, it is very difficult to differentiate the true electrostriction from the Maxwell stress experimentally, particularly for heterogeneous dielectric systems. Both of these stresses induce bulk deformations that display a quadratic dependence with the electrical field.
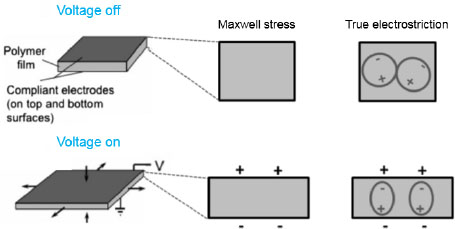
Figure 8.3. An illustration demonstrating the different mechanisms for the actuation of the materials in response to an applied electric field. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
According to the literature, the actuation for elastomeric materials with low permittivity (![]() ), such as silicones, natural rubber latex and acrylates, results mainly from Maxwell stress. On the other hand, for high permittivity (
), such as silicones, natural rubber latex and acrylates, results mainly from Maxwell stress. On the other hand, for high permittivity (![]() ) polar polymers, such as polyvinylidene fluoride (PVDF) and PU, the actuation is dominated by the electrostriction mechanism and Maxwell stress as well.
) polar polymers, such as polyvinylidene fluoride (PVDF) and PU, the actuation is dominated by the electrostriction mechanism and Maxwell stress as well.
The electrostriction also describes the ability of materials to change their dielectric properties with deformation applied upon them, as shown in equation [8.12]. By replacing the Di with equation [8.9], one can obtain
where Y is the Young’s modulus and φj is the mechanical strain. In contrast to the actuator mode widely used in previous studies, we have developed a new method based on equation [8.16], that is, measuring the permittivity variation with applied mechanical deformation. This method allows for direct measurements of the true electrostriction coefficients with a negligible contribution of the Maxwell stress. In our measurements, a voltage of only 1 V is applied, which corresponds to an electrical field below 10–3 V/μm. The significance of Maxwell stress can be estimated by comparing the strain resultant from Maxwell stress and the strain mechanically applied by the tensile test mechanical instrument. The strain SMax resulting from Maxwell stress is given by
where E and Y, respectively, are the electrical field and the Young’s modulus of the material. This strain (~10–6%) is totally negligible compared to the strain mechanically applied (~10%). In the case of an isotropic electrostrictive polymer film subjected to a stress τ11 and to an electrical field along its thickness direction E3 (Figure 8.4(a)), the electrostriction coefficient can be expressed as
While in an isotropic electrostrictive polymer film subjected to a stress τ33 and to an electrical field along its thickness direction E3 (Figure 8.4(b)), the electrostriction is caculated as
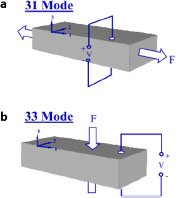
Figure 8.4. Two modes used to characterize the electrostriction coefficient by measuring the permittivity variation with mechanical deformation. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
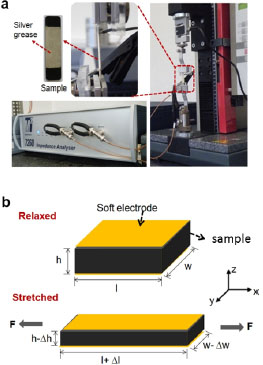
Figure 8.5. a) Setups for the measurement of permittivity variation during mechanical stretching. b) The mechanism by which a parallel plate capacitor changes its capacitance in response to a mechanical stretching (Yuan et al. 2018). © 2018, American Chemical Society. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
So the question arises: How can we measure the variation of dielectric permittivity? We have combined dielectric spectroscopy with the tensile test to meet this end (Figure 8.5(a)) (Yuan et al. 2018). The change in capacitance of a parallel plate capacitor relies on Poisson contraction as well as permittivity variation (Figure 8.5(b)). Longitudinal stretching of the capacitor causes elongation in length yet shrinkage in width and thickness due to Poisson’s effect.
The linear mechanics of the mechanical stretching process can be described as
where v is Poisson’s ratio; φx is the strain; and l, w and h are the dimensions of the capacitor in a relaxed state. Considering the dimensions of the capacitor in its stretched state, one can deduce the value of the capacitance Cstretch:

where ε0 is the permittivity of free space and εstretch is the relative permittivity in the stretched state. This electromechanical equation directly relates the capacitance to the permittivity, applied strain and initial geometry of the capacitor. Despite the fact that this equation is derived from Poisson contraction, it does not depend on the value of Poisson’s ratio in the case of isotropic dielectric materials. Therefore, by measuring the capacitance at different strains, we can directly determine the permittivity variations (Δε) of the material in response to mechanical deformations. This allows for calculation of true electrostrictive coefficients of a material directly through the aforementioned equation [8.18] or [8.19].
8.4. The route to high electrostriction materials
Electrostrictive materials have been widely used to efficiently convert electrical and mechanical energy (Zhang et al. 2002). As previously mentioned, all dielectric materials exhibit electrostriction. However, certain materials, known as relaxor ferroelectrics, have a high electrostriction coefficient (Zhang et al. 1998). Today, the most used electrostrictive ceramics are lead-based materials such as lead magnesium niobate (PMN), lead magnesium niobate-lead titanate (PMN-PT) and lead lanthanum zirconate titanate (PLZT). In spite of the high electrostrictive performances, they exibit several drawbacks, such as high sintering temperaure, brittleness and lead-related environmental concerns. Lead-free and flexible electrostrictive materials are always in high demand, particularly for large-stroke actuation applications. In this regard, the polymeric materials, such as dielectric elastomers (Pelrine et al. 2000; Lehmann et al. 2001; Brochu and Pei 2010; Luna et al. 2015, 2017; Yuan et al. 2015), high-k elastomer composites (Clarke et al. 2001; Huang et al. 2009; Kohlmeyer et al. 2009; Molberg et al. 2010; Wongtimnoi et al. 2011; Kuang et al. 2015; Romasanta et al. 2015) and PVDF and its copolymers (Zhang et al. 1998; Li 2003; Huang et al. 2004; Minh Quyen et al. 2015), are more promising. However, most of the current electrostrictive polymers suffer from a low electromechanical coupling coefficient (M~10–18 m2/V2 at 100 Hz) (Zhang et al. 1997; Guillot and Balizer, 2003; Huang et al. 2004) due to their weak intrinsic polarization response, which severely restricts their applicability for practical devices. A major challenge facing the community is the development of electromechanically-active polymeric materials with giant electrostriction (Yuan et al. 2018).
As discussed in the previous section, the electrostriction is a result of the change of the polarization in materials in response to the external mechanical or electrical stimuli. The electromechanical properties can thus be optimized by improving the polarization response in polymers through designing structures on different scale levels.
NASA has developed a new electrostrictive graft elastomer (Su et al. 2000, 2002) which is approximately 30 times stiffer than classic PU. These strong elastomers have potential employment as an actuator that provides much higher mechanical energy and power output than soft neat elastomers. As illustrated in Figure 8.6, the graft elastomer contains flexible backbone chains and grafts that are the side chains of each backbone. The grafts physically cross-link with each other and eventually form crystal units. Both the backbone chain and the crystal graft units have polarized monomers. These monomers contain atoms with electric partial charges, giving rise to dipole moments. These dipole moments will rotate to align with the external electric field and therefore stimulate backbone chain reorientation and induce a much larger electrostrictive strain than neat PU (Wang et al. 2004).
Another example could be the dielectric elastomer gel. Kim et al. (2011) introduced periodic nanoscale interfaces to dielectric elastomer gels and achieved an unexpected high electrostriction coefficient by creating numerous interfaces between dielectric mismatched nanostructured domains, resulting in a large electromechanical strain response at a relatively low electric field. A TEM picture showed the nanostructured domains in a thermoplastic elastomer gel composed of 20 wt% poly(styrene-block-ethylbutylene-block-styrene) (SEBS) and 80 wt% white mineral oil. The strong electrostrictive effect is attributed to the inhomogeneous electric field in the film thickness direction because of the high density of interfaces between dielectric mismatched periodic nanoscale domains. The demonstrated electrostrictive coefficient can be two orders of magnitude higher than that of neat PU.
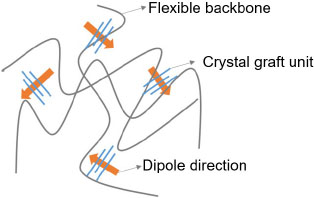
Figure 8.6. Illustrative structure of the electrostrictive graft elastomer (Wang et al. 2004). For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
Normal ferroelectric poly(vinylidene fluoride-trifluoroethylene) P(VDF-TrFE) polymers have excellent piezoelectric properties. However, after the introduction of non-polar molecular structure in the ferroelectric phase (Zhang et al. 1998) or the chemical copolymerization of a third bulky monomer (Xia et al. 2002), it can be converted to relaxor ferroelectric polymers with large electrostriction. The improved electrostriction is due to the difference in the lattice constant between the polar and non-polar phases and to the gradual increase in field-induced polarization in the relaxor P(VDF-TrFE) polymer.
Though improvements of the electrostriction effect have been achieved based on changing the polymer composition, a versatile strategy actually relies on the composite approach, that is, mixing electroactive nanofillers with polymer matrices. It allows for a large tunability by varying the identity, shape and content of nanoadditives.
Giant permittivity can actually be obtained in electrically heterogeneous systems composed of conducting particles and insulating polymer matrices (Yuan et al. 2011, 2014, 2017; Luna et al. 2015, 2017) The permittivity of a composite material diverges at the percolation threshold (Dang et al. 2012, 2013; Luna et al. 2015, 2017; Yuan et al. 2015, 2017, 2018; Yuan 2017). Systems become critically sensitive at this point, thereby providing the possibility for giant electrostriction (Luna et al. 2017).
A large amount of research have been conducted by randomly mixing conducting particles, such as metal nanoparticles and carbon-based nanomaterials, with polymers to reach a high permittivity. The improved electromechanical performance can be associated with the variation of the local electrical field as well as the strong interfacial polarization as a result of charge accumulation (Lallart et al. 2012). Typical solution methods were used to randomly mix the nanoparticles with polymer matrices. Unfortunately, the electrostriction coefficient experimentally achieved until now remains low. This is likely due to a lack of optimization of the morphology of the near-percolated networks formed by the particles.
Recently, we reported a soft electrostrictive elastomer nanocomposite composed of reduced graphene oxide (rGO) in a polydimethylsiloxane (PDMS) matrix. The advantage of using graphene is based on the essential feature of its large surface area, which is critical to achieve large polarization in composites. A diblock copolymer aminopropylmethylsiloxane-b-dimethylsiloxane (PAPMS-b-PDMS) was chosen to adsorb onto graphene oxide (GO) nanosheets and stabilize their dispersion in composite precursor solutions. Such interaction is based on the electrostatic attraction between negative charges of GO nanosheets and positive charges of the copolymer (Figure 8.7(a)). As such, the GO nanosheets continuously transferred from water phase into diethyl ether phase as this interaction at the water/oil interface proceeded (Figure 8.7(b)) (Yuan et al. 2015).
The obtained GO suspension is well suited to preparing PDMS matrix composites without showing any reaggregation of GO nanosheets during the process. Moreover, with increasing concentration of such a GO suspension, a nematic liquid crystal (LC) phase can form even with a low GO content (Figures 8.7(c) and (d)).
Experimentally, we assessed the percolation transition in rGO/PDMS composites. The margin improvement of conductivity at 1.0 wt% indicates that this loading is well below the percolation threshold. However, at this rGO-PDMS mass ratio, LC transition has already taken place (Figure 8.7(d)), indicating that the flakes with large anisotropy tend to self-assemble into nematic LCs before they form a percolated path along the direction of the conductivity measurement. This phenomenon would fundamentally change our views on the interest of graphene for conductive composites. Such competition can, nevertheless, be positively exploited to develop dielectric composites. The ordered liquid crystalline graphene structure is expected to promote the formation of effective microcapacitors to afford a very high permittivity (~2000 at 0.1 Hz) (Yuan et al. 2015).
It is found that graphene-doped PDMS exhibits very large variations of permittivity within a very small strain range due to the liquid crystalline alignment of the graphene sheets within the polymer. Such large variations yield an ultralarge electrostriction coefficient (M~10–14 m2/V2 at 0.1 Hz), superior to those (from 10–18 m2/V2 to 10–15 m2/V2 at 0.1 Hz) obtained in conventional polymer nanocomposites (Guiffard et al. 2006; Park et al. 2008; Wongtimnoi et al. 2011, 2013; Guyomar et al. 2012; Lallart et al. 2012; Jaaoh et al. 2015, 2016).

Figure 8.7. a) Schematic illustration of the electrostatic attraction between negative charges of GO nanosheets and positive ones of the PAPMS-b-PDMS copolymer. b) Photograph shows the phase transfer of GO flakes from the aqueous to the organic phase. c) Photograph of soft PDMS composites with GO (brown) and rGO (black) nanosheets at a loading of 1 wt%. d) Optical micrographs between crossed polarizers of GO suspensions in PDMS monomer at a concentration of 1 wt% (Yuan et al. 2015). For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
8.5. Applications of electrostrictive materials
Electrostrictive polymeric materials have been well-known for their significant advantages of facile proccessibility, short response times (less than milliseconds), low hysteresis and the ability to generate high strain levels (>7%), which is far above those of traditional inorganic electrostrictive materials or piezoceramics. Therefore, ever-increasing research attention has been paid to the community of electrostrictive polymers during recent decades because of their promising applications, ranging from functional actuators and capacitive sensors to integrated microelectromechanical systems. Recently, electrostrictive polymers have even been shown to be potentially useful for harvesting energy from vibration sources to power electronic devices.
8.5.1. Actuators
Dielectric elastomer, as one type of EAP, has been widely used to develop fuctional actuators including artifical muscles. Dielectric elastomer deforms due to the electrostatic interaction between two electrodes with opposite electric charges. In earlier years, most of the focus was on actuator configurations. Electroded dielectric elastomer films can be rolled into a scroll, stretched over a frame, or laminated on a flexible substrate to form unimorphs and bimorphs or even formed into a tubular shape. In more recent years, the focus has turned to using the material properties, particularly the electrostriction coefficient (see the previous section) to improve the actuating performances. In a review paper, O’Halloran et al. (2008) summarized the operating principle and actuation mechanisms behind the actuator technology, highlighted its advantages over other existing actuator technologies, identified the challenges and examined the main research focus within the field.
8.5.2. Capacitive sensors
In addition to actuators, the electrostrictive polymers can be sandwiched with a pair of compliant electrodes to create a variable capacitor, which can be used to detect pressure or deformation in the change of capacitance. Such pressure sensors strategically placed on a flexible synthetic skin working in the pressure range of 1 kPa to 1 MPa would be able to detect fingertip texture, hand grip and in-shoe pressures.
According to equation [1.25], for a sensor fabricated in three layers with a dielectric between the electrodes, the capacitance will be proportional to strain under a simple stretching. As we know, the small strain sensing can be also realized by electrical resistance measurement of elastomer composites embedded with conducting nanoparticles. However, for large strain sensing that involves filled elastomers, the measurement will be nonlinear due to geometric effect and also transient changes in resistivity of the electrodes.
Capacitance measurement offers an opportunity for reliable measurement that is nearly unaffected by transient changes in electrode resistance. The capacitive strain gauge factor κ can be written as

where Δε is the permittivity variation. For non-polar dielectrics like silicon rubber, Δε = 0, so the κ = 1. While for electrically heterogeneous dielectrics, Δε ≠ 0, the capacitance variation ΔC is determined by the geometry effect coupled with the true electrostriction effect of the dielectrics, as the case of near-percolated elastomer composites with conducting nanoparticles. Plenty of reported capacitive sensors are based on pure silicons sandwiched by diverse compliant electrodes. For instance, Bao’s group reported a capacitive sensor with transparant SWNT films as compliant electrodes. This sensor can detect a pressure up to 50 kPa and strain up to 50%. The capacitance linearly increases with the strain, showing a slope near 1. In spite of the fact that is not very sensitive to extremely low pressures, it is still able to detect pressures generated by a fly (20 mg). The transparency greatly expands the scope of applications, such as touch screens and electronic skins with various options of skin color.
In order to improve the sensitivity of capacitive sensors, the key is to employ soft materials with a high electrostriction coefficient. According to equation [8.26], combining the geometry effect and electrostriction to induce a large capacitance variation for a given strain level is promising. Based on the near-percolated rGO composite demonstrated in Figure 8.7, we showed a highly efficient capacitive sensor in response to a cyclic mechanical tensile loading (Figure 8.8(a)). Such a sensor device was stretched to a strain of 4%, after which the deformation was released with the same rate as stretching. Such a cycle was repeated 20 times. It was noticed that during the first four cycles, the capacitance variation slightly decreased from 2.4 to 2.2 nF yet hereafter tended to remain stable (Figure 8.8(b)). Recalling that the capacitance at relax state is 4.1 nF, a constant capacitive gauge factor of –13.6 was obtained. Compared with the capacitive sensors based only on the geometry effect (gauge factor <1), the electrostrictive composite sensors show a much higher sensitivity, which derives from their ultrahigh electrostriction.
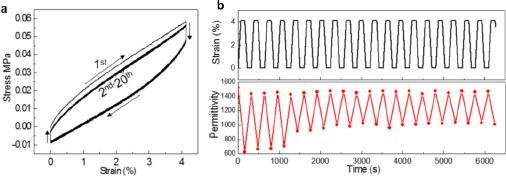
Figure 8.8. a) Stress as a function of strain under a cyclic tensile loading-deloading. b) Time dependence of the strain and relative permittivity at 0.1 Hz over the 20 stretching/releasing cycles (Yuan et al. 2018). © 2018, American Chemical Society. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
8.5.3. Mechanical energy harvesting
Dielectric elastomers have demonstrated great promise as actuator and sensory materials. Nevertheless, their potential in converting mechanical enegy into electricity in a generator mode has been used less. In practice, dielectric elastomer acts electrically as variable capacitors do. If a low voltage is placed on a pre-strained dielectric elastomer, the contraction works against the electrostatic field stress and raises the voltage of the charge, generating electrical energy. Such simplicity, combined with demonstrated high energy density and high efficiency (Pelrine et al. 2001; Lallart et al. 2012) suggests that dielectric elastomers are promising for a wide range of energy-harvesting applications. Compared with competing energy-harvesting technologies, such as electromagnetic or piezoelectric ones, dielectric elastomers show less stiffness, meaning they can be applied to large deformations and operate even at frequencies as low as 0.1 Hz (ocean waves). Their energy density can reach 0.4 J/g, which is one order of magnitude higher than those of the counterparts. Meanwhile their energy conversion efficiency can be higher than 50%, while that of an electromagnetic technology is usually less than 20%.
Figure 8.9 shows the performance limits and also the basic operational cycles of a dielectric elastomer generator. In detail, there are four basic steps in the simplest operational cycles: (1) the film is stretched to its maximum stretch state; (2) a voltage or charge is applied to the film; (3) the film relaxes its internal elastic energy with constant charge, constant voltage or constant field; and (4) the charge is removed from the film to return it to its initial state. The horizontal axis of Figure 8.9 is a variable related to the change in capacitance, while the vertical axis is the square of the voltage or electric field across the film. Therefore, the shaded blue area represents the amount of extracted energy. The net amount of extracted energy per unit volume of film for the constant charge (uQ), constant voltage (uV), and constant field (uE) cycles, respectively, are (Kornbluh et al. 2011, 2012) given as
where Emax and ε are, respectively, the maximum electric field and permittivity of the film samples. γ is the ratio of stretched area/unstretched area.
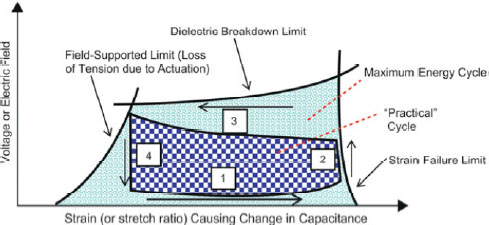
Figure 8.9. The performance limits and operational cycles of a dielectric elastomer generator (Kornbluh et al. 2012). For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
On the basis of previous discussion, desirable dielectric elastomers for mechanical energy harvesting should have high breakdown strength, high permittivity and low dielectric losses. Meanwhile, they should sustain high flexibility so that they can be deformed with small forces, low viscoelastic losses and low creep and stress relaxation effect. In recent decades, the most common candidate materials considered for generator applications are the ones based on commercial formulations of acrylics and silicones (Carpi et al. 2008) as well as PU-based polymers (Wongtimnoi et al. 2011, 2013).
Pelrine et al. (2001) demonstrated the fundamentals and applications of neat silicone as a generator. They used the constant charge cycle to harvest the stored mechanical energy as the prestrained silicone elastomer relaxed. The energy harvesting circuit is shown in Pelrine et al. (2001). The film was initially biased with a bias voltage supplied through a diode. A drain resistor in parallel exhibits a huge resistance so that the charge that is drained during contraction can be negligible. The dielectric elastomers have a low enough leakage current so that the decay back to the bias voltage can take tens of seconds. The extracted energy can be easily manifested by the boosting and decay of the voltage on the drain resistor.
Dielectric elastomers are well suited to applications in which electrical power comes from relatively large motions, such as those produced by wind energy, waves and human activities. Kornbluh et al. (2011, 2012) have developed a heel-strike generator using electrode-coated silicone polymers. Such a generator can be installed in a normal shoe or boot (Ashley 2003).
The compression of the heel during normal walking can harvest power from human activity yet does not add any physical burden to the wearer. The device produced an electrical output of 0.8 J per step (the power is 1 W). The dielectric elastomer generator is an array of multilayer diaphragms that transfer the compression of the heel into deflection of the active layers, which consist of 20 stacked layers of dielectric elastomer films. The device used prestrained VHB 4910 acrylic and performed with a maximum energy density of about 0.3 J/g.
Recently, SRI International has demonstrated the use of dielectric elastomer for harvesting the energy of ocean waves. Ocean wave power has been called “blue energy” and has potential to produce clean, renewable energy in an environmentally sound manner. Harvesting such blue energy is critical as the world moves toward a more secure and sustainable energy future. It was shown that the ocean wave energy could potentially meet 10% of the world’s total electricity demand. The U.S. Electric Power Research Institute (EPRI) estimated the viable resource in the United States at 255 TWh per year (6% of demand), comparable to the energy currently generated in the United States by conventional hydropower (Hagerman and Bedard 2003). Based on the direct conversion of ocean wave to mechanical stretching and contract of the dielectric elastomer, Kornbluh et al. have developed a proof-of-principle generator system (Kornbluh et al. 2011). This system is shown in Figure 8.10. The system was tested at sea in the Pacific Ocean near Santa Cruz, California. It produced an output of >25 J by using about 220 g of active dielectric elastomer material, giving rise to an energy density of more than 0.1 J/g. The efficiency of the energy-harvesting circuit used was 78%. The overall performance suggests that dielectric elastomers may indeed be practical for large-scale power generation.

Figure 8.10. Ocean wave power generator based on electrode coated dielectric elastomers (Kornbluh et al. 2011). For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
By recognizing that high permittivity is desirable for mechanical energy harvesting, many researchers have focused on improving the energy conversion capabilities of elastomers upon incorporating diverse functional nanoparticles, such as CB (Wongtimnoi 2011), barium titanate (Yin et al. 2017; Yang et al. 2019) and rGO (Nesser et al. 2018).
Yin et al. (2017) targeted generators with improved performance of mechanoelectric energy conversion by designing a ternary composite, which was composed of thermoplastic PU, barium titanate (BT) nanoparticles and dibutyl phthalate (DBP) plasticizers. They simultaneously achieved a 28% increase in permittivity and a 43% decrease in Young’s modulus by blending the PU with 25 phr of BT and 60 phr of DBP. Both of them are very desirable for improving the mechanical energy-harvesting capability. By simply stretching the sample to an area expansion of 80% and appling a bias voltage of 900 V (the circuit is shown in Figure 8.11(a)), the terpolymer with 15% of BT and 60% of DBP exhibited a harvested energy density up to 1.71 mJ/cm3 and an efficiency of 0.45%. The harvested energy can light an LED array, consisting of 30 blue LEDs in series (Figure 8.11(b)). As a comparision, they tested the widely investigated dielectric elastomer, VHB4910, under the same stretching-releasing operations and only obtained an energy density of 0.21 mJ/cm3. These results clearly validate a principle that composite elastomers with tailored properties are indeed desirable for developing advanced generators.

Figure 8.11. a) The electric circuit used for mechanical energy harvesting. b) 30 blue LEDs in series can be lit by the harvested energy during each cycle (Yin et al. 2017). © 2017, American Chemical Society. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
In addition to the high-k nanoparticles, conductive nanofiller-based near-percolative composites have also shown improved electrostrictive properties. They are potentially promising that they can be used for developing generators. Very recently, Nesser et al. (2018) integrated electrostrictive nanocomposites, composed of rGO dispersed in polydimethylsiloxane, into all-organic microcantilever resonators specifically designed for mechanical energy harvesting from ambient vibrations. Figures 8.12(a) and (b) present the top and side views of the micro-cantilever, consisting of electrostrictive PDMS/rGO composites coated by two layers of conducting polymer electrodes. The organic micro-electro-mechanical systems (MEMSs) were fabricated at low cost and in an all-organic approach by means of printing methods associated with xurography. The low resonant frequency (<100 Hz) of the resulting microcantilevers can be realized by simply incorporating a seismic mass at their tip. With the help of the constant voltage circuit (Figure 8.12(c)), the MEMS contilever provides a power of more than 6 μW/cm3 for an acceleration amplitude of 1 g at the MEMS resonant frequency of 17 Hz (Figure 8.12(d)). The demonstrated output power density is higher than that extracted from PU-based electrostrictive materials (Jaaoh et al. 2016), and is on the same level as that generated by PVDF terpolymers (Cottinet et al. 2011).

Figure 8.12. a) Top and b) side view of the micro-electro-mechanical systems (MEMS) cantilever, consisting of electrostrictive PDMS/rGO composites coated by two layers of electrodes. For a color version of this figure, see www.iste.co.uk/bai/nanocomposites.zip
In spite of the tremendous progress of the generators based on the electrostrictive polymeric materials, there are still several challenges to be addressed in the future. Lifetime and reliability issues may be the greatest challenge to adoption of dielectric elastomers. Tradeoff performances could be made by extending the lifetimes yet this has seldom been characterized in the literature. Reduction of the dielectric losses of electrostrictive materials can be another key issue for improving the output and efficiency of generators. Another challenge relies on the design of energy harvesting circuits. In many cases, tradeoffs will be necessary between circuit complexity and cost. Usually, it has been preferred that the former has high efficiency yet this increases the cost of the generators. Furthermore, the energy-harvesting cycles should be optimized according to the properties of materials and the environmental mechanical resources.
8.6. Conclusions and perspectives
All dielectric materials have the electrostriction effect. This chapter starts from the classification of dielectric mateials and then reviews the fundamental and application-related issues for electrostrictive materials. Particular attention is paid to the means of characterizing the electrostriction coefficient as well as the routes to high electrostriction materials. Compared to changing the polymer composition, the composite approach can be a more versatile strategy. It allows for a large tunability of the electrostriction of polymers by varying the identity, shape and content of nanoadditives. At the end, actuation, sensory and energy-harvesting applications of electrostrictive materials are summerized and examples for each application are given. An emphasis was given to the generator application. Challenges for further improving the generator performances and large-scale applications are discussed in detail. From a more general point of view, we note that the fabrication of nanocomposites is usally guided by intuitive expectations and empirical approaches. Advanced modeling should be further developed in order to provide a more rational guidance of experimental efforts. It is expected that the development of new formulation and microfabrication technologies will help in the optimization and control of nanocomposite structures to achieve enhanced electrostrictive properties in the years to come.
8.7. References
Ashley, S. (2003). Artificial muscles. Scientific American, 289(4), 52–59.
Bar-Cohen, Y. (2002). Electroactive polymers as artificial muscles: A review. Journal of Spacecraft and Rockets, 39(6), 822–827.
Brochu, P. and Pei, Q. (2010). Advances in dielectric elastomers for actuators and artificial muscles. Macromolecular Rapid Communications, 31(1), 10–36.
Carpi, F., DeRossi, D., Kornbluh, R.D., Pelrine, R., Sommer-Larsen, P. (2008). Dielectric Elastomers as Electromechanical Transducers. Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. Elsevier Press, Amsterdam.
Clarke, J., Clarke, B., Freakley, P.K., Sutherland, I. (2001). Compatibilising effect of carbon black on morphology of NR-NBR blends. Plastics, Rubber and Composites, 30(1), 39–44.
Cottinet, P.-J., Lallart, M., Guyomar, D., Guiffard, B., Lebrun, L., Sebald, G., Putson, C. (2011). Analysis of AC-DC conversion for energy harvesting using an electrostrictive polymer P(VDF-TrFE-CFE). IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 58(1), 30–42.
Damjanovic, D. (1998). Ferroelectric, dielectric and piezoelectric properties of ferroelectric thin films and ceramics. Reports on Progress in Physics, 61(9), 1267–1324.
Dang, Z., Yuan, J., Zha, J., Zhou, T., Li, S., Hu, G. (2012). Fundamentals, processes and applications of high-permittivity polymer matrix composites. Progress in Materials Science, 57(4), 660–723.
Dang, Z., Yuan, J., Yao, S., Liao, R. (2013). Flexible nanodielectrics materials with high permittivity for power energy storage. Advanced Materials, 25, 6334–6365.
Guiffard, B., Seveyrat, L., Sebald, G., Guyomar, D. (2006). Enhanced electric field-induced strain in non-percolative carbon nanopowder/polyurethane composites. Journal of Physics D – Applied Physics, 39(14), 3053–3057.
Guillot, F.M. and Balizer, E. (2003). Electrostrictive effect in polyurethanes. Journal of Applied Polymer Science, 89(2), 399–404.
Guyomar, D., Cottinet, P.J., Lebrun, L., Putson, C., Yuse, K., Kanda, M., Nishi, Y. (2012). The compressive electrical field electrostrictive coefficient M33 of electroactive polymer composites and its saturation versus electrical field, polymer thickness, frequency, and fillers. Polymers for Advanced Technologies, 23(6), 946–950.
Hagerman, G. and Bedard, R. (2003). Guidelines for preliminary estimation of power production, by offshore wave energy conversion devices. EPRI Report 297213, Electric Power Research Institute.
Huang, C., Klein, R., Xia, F., Li, H.F., Zhang, Q.M., Bauer, F., Cheng, Z.Y. (2004). Poly(vinylidene fluoride-trifluoroethylene) based high performance electroactive polymers. IEEE Transactions on Dielectrics and Electrical Insulation, 11(2), 299–311.
Huang, X., Xie, L., Jiang, P., Wang, G., Liu, F. (2009). Electrical, thermophysical and micromechanical properties of ethylene-vinyl acetate elastomer composites with surface modified BaTiO3 nanoparticles. Journal of Physics D – Applied Physics, 42(24), 245407.
Jaaoh, D., Putson, C., Muensit, N. (2015). Deformation on segment-structure of electrostrictive polyurethane/polyaniline blends. Polymer, 61, 123–130.
Jaaoh, D., Putson, C., Muensit, N. (2016). Enhanced strain response and energy harvesting capabilities of electrostrictive polyurethane composites filled with conducting polyaniline. Composites Science and Technology, 122, 97–103.
Jean, P., Wattez, A., Ardoise, G., Melis, C., Van Kessel, R., Fourmon, A., Barrabino, E., Heemskerk, J., Queau, J.P. (2012). Standing wave tube electro active polymer wave energy converter. Conference on Electroactive Polymer Actuators and Devices (EAPAD), San Diego, USA, March 12–15.
Kim, B., Park, Y.D., Min, K., Lee, J.H., Hwang, S.S., Hong, S.M., Kim, B.H., Kim, S.O., Koo, C.M. (2011). Electric actuation of nanostructured thermoplastic elastomer gels with ultralarge electrostriction coefficients. Advanced Functional Materials, 21(17), 3242–3249.
Kohlmeyer, R.R., Javadi, A., Pradhan, B., Pilla, S., Setyowati, K., Chen, J., Gong, S. (2009). Electrical and dielectric properties of hydroxylated carbon nanotube-elastomer composites. Journal of Physical Chemistry C, 113(41), 17626–17629.
Kornbluh, R.D., Pelrine, R., Pei, Q.B., Heydt, R., Stanford, S., Oh, S.J., Eckerle, J. (2002). Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation and smart structures. Smart Structures and Materials 2002 Conference, San Diego, USA, March 18–21.
Kornbluh, R.D., Pelrine, R., Prahlad, H., Wong-Foy, A., McCoy, B., Kim, S., Eckerle, J., Low, T. (2011). From boots to buoys: Promises and challenges of dielectric elastomer energy harvesting. Conference on Electroactive Polymer Actuators and Devices (EAPAD) 2011, San Diego, USA, March 7–10.
Kornbluh, R.D., Pelrine, R., Prahlad, H., Wong-Foy, A., McCoy, B., Kim, S., Eckerle, J., Low, T. (2012). Dielectric elastomers: Stretching the capabilities of energy harvesting. Mrs Bulletin, 37(3), 246–253.
Kuang, Z., Chen, Y., Lu, Y., Liu, L., Hu, S., Wen, S., Mao, Y., Zhang, L. (2015). Fabrication of highly oriented hexagonal boron nitride nanosheet/elastomer nanocomposites with high thermal conductivity. Small (Weinheim an der Bergstrasse, Germany), 11(14), 1655–1659.
Lallart, M., Cottinet, P.-J., Guyomar, D., Lebrun, L. (2012). Electrostrictive polymers for mechanical energy harvesting. Journal of Polymer Science Part B – Polymer Physics, 50(8), 523–535.
Lehmann, W., Skupin, H., Tolksdorf, C., Gebhard, E., Zentel, R., Kruger, P., Losche, M., Kremer, F. (2001). Giant lateral electrostriction in ferroelectric liquid-crystalline elastomers. Nature, 410(6827), 447–450.
Li, J.Y. (2003). Exchange coupling in P(VDF-TrFE) copolymer based all-organic composites with giant electrostriction. Physical Review Letters, 90(21), 217601.
Lipomi, D.J., Vosgueritchian, M., Tee, B.C.K., Hellstrom, S.L., Lee, J.A., Fox, C.H., Bao, Z. (2011). Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nature Nanotechnology, 6(12), 788–792.
Luna, A., Yuan, J., Neri, W., Zakri, C., Poulin, P., Colin, A. (2015). Giant permittivity polymer nanocomposites obtained by curing a direct emulsion. Langmuir, 31(44), 12231–12239.
Luna, A., Pruvost, M., Yuan, J.K., Zakri, C., Neri, W., Monteux, C., Poulin, P., Colin, A. (2017). Giant electrostrictive response and piezoresistivity of emulsion templated nanocomposites. Langmuir, 33(18), 4528–4536.
Minh Quyen, L., Capsal, J.-F., Galineau, J., Ganet, F., Yin, X., Yang, M., Chateaux, J.-F., Renaud, L., Malhaire, C., Cottinet, P.-J., Liang, R. (2015). All-organic electrostrictive polymer composites with low driving electrical voltages for micro-fluidic pump applications. Scientific Reports, 5, 11814.
Molberg, M., Crespy, D., Rupper, P., Nueesch, F., Manson, J.-A.E., Loewe, C., Opris, D.M. (2010). High breakdown field dielectric elastomer actuators using encapsulated polyaniline as high dielectric constant filler. Advanced Functional Materials, 20(19), 3280–3291.
Nesser, H., Debeda, H., Yuan, J.K., Colin, A., Poulin, P., Dufour, I., Ayela, C. (2018). All-organic microelectromechanical systems integrating electrostrictive nanocomposite for mechanical energy harvesting. Nano Energy, 44, 1–6.
O’Halloran, A., O’Malley, F., McHugh, P. (2008). A review on dielectric elastomer actuators, technology, applications, and challenges. Journal of Applied Physics, 104(7), 071101.
Park, C., Kang, J.H., Harrison, J.S., Costen, R.C., Lowther, S.E. (2008). Actuating single wall carbon nanotube-polymer composites: Intrinsic unimorphs. Advanced Materials, 20(11), 2074–2079.
Pelrine, R., Kornbluh, R.D., Pei, Q.B., Joseph, J. (2000). High-speed electrically actuated elastomers with strain greater than 100%. Science, 287(5454), 836–839.
Pelrine, R., Kornbluh, R.D., Eckerle, J., Jeuck, P., Oh, S.J., Pei, Q.B., Stanford, S. (2001). Dielectric elastomers: Generator mode fundamentals and applications, Smart Structures and Materials 2001 Conference, Newport Beach, USA, March 5–8.
Romasanta, L.J., Lopez-Manchado, M.A., Verdejo, R. (2015). Increasing the performance of dielectric elastomer actuators: A review from the materials perspective. Progress in Polymer Science, 51, 188–211.
Su, J., Harrison, J.S., St Clair, T.L., Bar-Cohen, Y., Leary, S. (2000). Electrostrictive graft elastomers and applications. In Materials Research Society Symposium Proceedings, Volume 600, Electroactive Polymers, Zhang, Q.M., Furukawa, T., Bar-Cohen, Y., Scheinbeim, Y. (eds). Cambridge University Press, Cambridge.
Su, J., Costen, R.C., Harrison, J.S. (2002). Performance evaluation of bending actuators made from electrostrictive graft elastomers. Smart Structures and Materials 2002 Conference, San Diego, USA, March 18–21.
Vijaya, M.S. (2013). Piezoelectric Materials and Devices: Applications in Engineering and Medical Sciences. CRC Press, Boca Raton.
Wang, Y.Q., Sun, C.J., Zhou, E., Su, J. (2004). Deformation mechanisms of electrostrictive graft elastomer. Smart Materials & Structures, 13(6), 1407–1413.
Wang, T.S., Farajollahi, M., Choi, Y.S., Lin, I.T., Marshall, J.E., Thompson, N.M., Kar-Narayan, S., Madden, J.D.W., Smoukov, S.K. (2016). Electroactive polymers for sensing. Interface Focus, 6(4), 20160026.
Wongtimnoi, K. (2011). Polyurethanes électrostricitifs et nanocomposites : caractérisation et analyse des mécanismes de couplage électromécaniques. PhD Thesis, Institut National des Sciences Appliquées de Lyon.
Wongtimnoi, K., Guiffard, B., Bogner–Van de Moortele, A., Seveyrat, L., Gauthier, C., Cavaille, J.Y. (2011). Improvement of electrostrictive properties of a polyether-based polyurethane elastomer filled with conductive carbon black. Composites Science and Technology, 71(6), 885–892.
Wongtimnoi, K., Guiffard, B., Bogner–Van de Moortele, A., Seveyrat, L., Cavaille, J.Y. (2013). Electrostrictive thermoplastic polyurethane-based nanocomposites filled with carboxyl-functionalized multi-walled carbon nanotubes (MWCNT-COOH): Properties and improvement of electromechanical activity. Composites Science and Technology, 85, 23–28.
Xia, F., Cheng, Z.Y., Xu, H.S., Li, H.F., Zhang, Q.M., Kavarnos, G.J., Ting, R.Y., Abdul-Sedat, G., Belfield, K.D. (2002). High electromechanical responses in a poly (vinylidene fluoride-trifluoroethylene-chlorofluoroethylene) terpolymer. Advanced Materials, 14(21), 1574–1577.
Yang, Y., Gao, Z.-S., Yang, M., Zheng, M.-S., Wang, D.-R., Zha, J.-W., Wen, Y.-Q., Dang, Z.-M. (2019). Enhanced energy conversion efficiency in the surface modified BaTiO3 nanoparticles/polyurethane nanocomposites for potential dielectric elastomer generators. Nano Energy, 59, 363–371.
Yin, G.L., Yang, Y., Song, F.L., Renard, C., Dang, Z.M., Shi, C.Y., Wang, D.R. (2017). Dielectric elastomer generator with improved energy density and conversion efficiency based on polyurethane composites. ACS Applied Materials & Interfaces, 9(6), 5237–5243.
Yuan, J. (2017). Percolation of carbon nanomaterials for high-k polymer nanocomposites. Chinese Chemical Letters, 28(11), 2036–2044.
Yuan, J., Yao, S.-H., Dang, Z.-M., Sylvestre, A., Genestoux, M., Bai, J. (2011). Giant dielectric permittivity nanocomposites: Realizing true potential of pristine carbon nanotubes in polyvinylidene fluoride matrix through an enhanced interfacial interaction. Journal of Physical Chemistry C, 115(13), 5515–5521.
Yuan, J., Yao, S., Li, W., Sylvestre, A., Bai, J. (2014). Vertically aligned carbon nanotube arrays on SiC microplatelets: A high figure-of-merit strategy for achieving large dielectric constant and low loss in polymer composites. Journal of Physical Chemistry C, 118(40), 22975–22983.
Yuan, J., Luna, A., Neri, W., Zakri, C., Schilling, T., Colin, A., Poulin, P. (2015). Graphene liquid crystal retarded percolation for new high-k materials. Nature Communications, 6, 8700.
Yuan, J., Yao, S., Li, W., Sylvestre, A., Bai, J. (2017). Anisotropic percolation of SiC–carbon nanotube hybrids: A new route towards thermally conductive high-k polymer composites. Journal of Physical Chemistry C, 121(22), 12063–12070.
Yuan, J., Luna, A., Neri, R., Zakri, C., Colin, A., Poulin, P. (2018). Giant electrostriction of soft nanocomposites based on liquid crystalline graphene. ACS Nano, 12(2), 1688–1695.
Yuan, J., Neri, W., Zakri, C., Merzeau, P., Kratz, K., Lendlein, A., Poulin, P. (2019). Shape memory nanocomposite fibers for untethered high-energy microengines. Science, 365(6449), 155–158.
Zhang, Q.M., Su, J., Kim, C.H., Ting, R., Capps, R. (1997). An experimental investigation of electromechanical responses in a polyurethane elastomer. Journal of Applied Physics, 81(6), 2770–2776.
Zhang, Q.M., Bharti, V., Zhao, X. (1998). Giant electrostriction and relaxor ferroelectric behavior in electron-irradiated poly(vinylidene fluoride-trifluoroethylene) copolymer. Science, 280(5372), 2101–2104.
Zhang, Q.M., Li, H.F., Poh, M., Xia, F., Cheng, Z.Y., Xu, H.S., Huang, C. (2002). An all-organic composite actuator material with a high dielectric constant. Nature, 419(6904), 284–287.