CHAPTER 1
FIRST-ORDER SCALAR EQUATIONS
In this chapter we study the basic properties of first-order scalar ordinary differential equations and their solutions. The first and larger part is devoted to linear equations and various of their basic properties, such as the principle of superposition, Duhamel’s principle, and the concept of stability. In the second part we study briefly nonlinear scalar equations, emphasizing the new behaviors that emerge, and introduce the very useful technique known as the principle of linearization. The scalar equations and their properties are crucial to an understanding of the behavior of more general differential equations.
1.1 Constant coefficient linear equations
Consider a complex function y of a real variable t. One of the simplest differential equations that y can obey is given by
where λ ![]()
![]() is constant. We want to solve the initial value problem, that is, we want to determine a solution for t ≥ 0 with given initial value
is constant. We want to solve the initial value problem, that is, we want to determine a solution for t ≥ 0 with given initial value
Clearly,
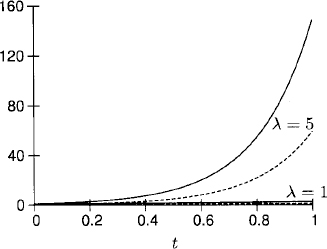
is the solution of (1.1), (1.2). Let us discuss the solution under different assumptions for the λ constant. In Figures 1.1 and 1.2 we illustrate the solution for y0 = 1+0.4i and different values of λ.
Figure 1.1 Exponentially decaying solutions. Re y shown as solid lines and Im y as dashed lines.
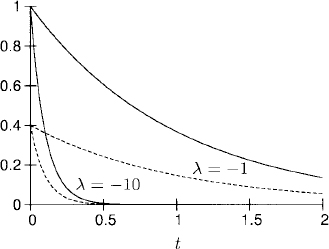
Figure 1.2 Exponentially growing solutions. Re y is shown as solid line and Im y as a dashed line.
![]()
![]()
![]()

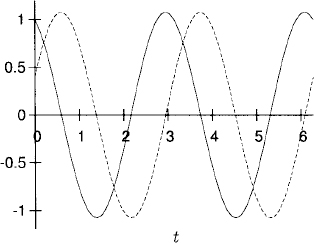
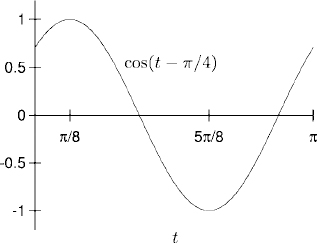
Figure 1.3 Oscillatory solution. Re y is shown as a solid line and Im y as a dashed line.
![]()
Figure 1.4 Real part of the solution (1.4).
![]()
![]()
![]()
![]()
Next, consider the inhomogeneous problem
where λ, a, μ, and y0 are complex constants. Regardless of the initial condition at first, we look for a particular solution of the form
Introducing (1.6) into the differential equation (1.5) gives us
![]()
that is,
![]()
If μ ≠ λ we obtain the particular solution
![]()
On the other hand, if μ = λ, the procedure above is not successful and we try to find a solution of the form1
Introducing (1.7) into the differential equation gives us
![]()
The last equation is satisfied if we choose A = a; recall that λ = μ by assumption. Let us summarize our results.
Lemma 1.1 The function
is a solution of the differential equation dy/dt = λy + aeμt.
Note that the particular solution yP(t) does not adjust, in general, to the initial data given (i.e., yP(0) ≠ y0). The initial value problem (1.5) can now be solved in the following way. We introduce the dependent variable u by
![]()
Initial value problem (1.5) yields
and, since dyP/dt = λyP + aeμt, we obtain
Thus, u(t) satisfies the corresponding homogeneous differential equation, and (1.3) yields
![]()
The complete solution
![]()
consists of two parts, yP(t) and u(t). The function yP(t) is also called the forced solution because it has essentially the same behavior as that of the forcing aeμt. The other part, u(t), is often called the transient solution since it converges to zero for t → ∞ if Re λ < 0.
Finally, we want to show how we can solve the initial value problem
with a general forcing F(t). We can solve this problem by applying a procedure known as Duhamel’s principle.
1.1.1 Duhamel’s principle
Lemma 1.2 The solution of (1.8) is given by
Proof: Define y(t) by formula (1.9). Clearly, y(0) = y0 (i.e., the initial condition is satisfied). Also, y(t) is a solution of the differential equation, because
![]()
This proves the lemma.
Exercise 1.1 Prove that the solution (1.9) is the unique solution of (1.8).
We shall now discuss the relation between the solution to inhomogeneous equation (1.8) and the homogeneous equation
We consider (1.10) with initial condition u = u(s) at a time s > 0. At a later time t ≥ s the solution is
![]()
Thus, eλ(t-s) is a factor that connects u(t) with u(s). We will call it the solution operator and use the notation
(1.11) ![]()
The solution operator has the following properties:
(1.12) 
Now we can show that the solution of inhomogeneous equation (1.8) can be expressed in terms of the solution of homogeneous equation (1.10). Then (1.9) becomes
In a somewhat loose way, we may consider the integral as a “sum” of many terms S(t, sj)F(sj)λs; think of approximating the integral by a Riemann sum. Then (1.13) expresses the solution of inhomogeneous problem (1.8) as a weighted superposition of solutions t → S(t, s) of homogeneous equation (1.10). The idea of expressing the solution of an inhomogeneous problem via solutions of the homogeneous equation is very useful. As we will see, it generalizes to systems of equations, to partial differential equations, and also to difference approximations. It is known as Duhamel’s principle.
Exercise 1.2 Use Duhamel’s principle to derive a representation for the solution of
Exercise 1.3 Consider the inhomogeneous initial value problem
where Pn(t) is a polynomial of degree n with complex coefficients. Show that the solution to the problem is of the form
![]()
where Qm(t) is a polynomial of degree m with m = n in the nonresonance case (μ ≠ λ) and m = n + 1 in the resonance case (μ = λ). Determine ![]() 0 in each case.
0 in each case.
We now want to consider scalar equations with smooth variable coefficients, which leads to the next principle.
1.1.2 Principle of frozen coefficients
In many applications the problem with smooth variable coefficients can be localized, that is, it can be decomposed in many constant coefficient problems (by using a partition of unity). Then by solving all these constant coefficient problems, one can construct an approximate solution to the original variable coefficient problem. The approximation can be as good as one wants. The general theory concludes that if all relevant constant coefficient problems have a solution, the variable coefficient problem also has a solution. This procedure is known as the principle of frozen coefficients. We do not go into it more deeply here.
1.2 Variable coefficient linear equations
1.2.1 Principle of superposition
The initial value problem
is an example of a linear problem. It has the following properties:
![]()

![]()
To summarize, for a linear problem such as (1.14), we can use superposition of solutions to obtain new solutions. This property of linear systems, known as the superposition principle, can be used to compose solutions with complicated forcing functions out of solutions of simpler problems. Consider, for example,
Since
![]()
consists of three terms, we solve three problems:
We do not yet impose initial conditions, so that we can choose simple particular solutions. By Lemma 1.1, particular solutions of the equations above are
![]()
Using the superposition principle, we find that

solves
![]()
Clearly,
![]()
Therefore, the solution of (1.16) is given by
![]()
where σ is determined by the initial condition
![]()
The superposition principle relies only on linearity; it holds for any linear equation or system of linear equations, both ordinary and partial differential equations. An equation is linear if the dependent variable and its derivatives appear linearly only (i.e., as the first power), in the equation.
Exercise 1.4 Solve the initial value problem
1.2.2 Duhamel’s principle for variable coefficients
We want to discuss now the solution of problem (1.14) in terms of Duhamel’s principle. To this end we discuss the solution operator in a more abstract setting.
Consider first an initial value problem for the homogeneous equation associated with (1.14):
The solution operator for problem (1.17) is given by
Clearly,
![]()
is the solution of (1.17). With this solution operator, Duhamel’s principle [see equation (1.13)] generalizes to our variable coefficient problem (1.14):
This can be proved in terms of general properties of the solution operator.
It is not difficult to show that (1.18) has the following properties:
![]()
![]()
We shall use these properties to prove that (1.19) solves (1.14). Since S(0, 0) = I, we have y(0) = y0. Also,
Therefore, y(t) given by (1.19) is the solution of (1.14).
Exercise 1.5 Find the solution operator and, using Duhamel’s principle, the solution of the following initial value problems.
1.3 Perturbations and the concept of stability
Given a problem and perturbations to it, we want to know what effect the perturbations have on the solution.
As an example, consider the initial value problem
with λ ≠ −1. (The exceptional case of resonance, λ = −1, can be treated with slight modifications.)
The solution of (1.20) is the decaying function
![]()
Now consider the same differential equation with perturbed initial data
where 0 < ![]()
![]() 1 is a small constant. Let w(t) =
1 is a small constant. Let w(t) = ![]() (t) − y(t) denote the difference between the perturbed and original solutions. Subtracting (1.20) from (1.21), we obtain
(t) − y(t) denote the difference between the perturbed and original solutions. Subtracting (1.20) from (1.21), we obtain
whose solution is
(1.22) ![]()
Depending on the sign of Re λ, there are three possibilities.
Figure 1.5 Decaying perturbation.
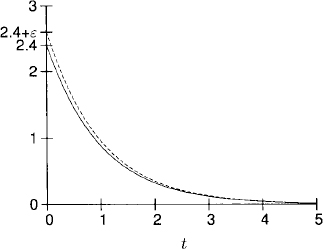
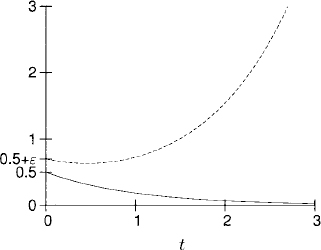
Figure 1.6 Non-decaying perturbation.
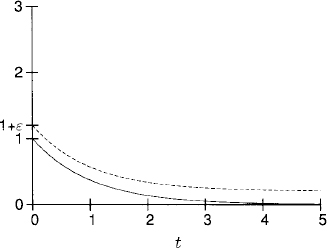
Figure 1.7 Exponentially growing perturbation.
In the latter case it will be very difficult to compute the original solution accurately in long time intervals. For example, if λ = 1 and ε = 10−10, then
![]()
Therefore, if the calculation introduces an error ε = 10−10 at t = 0, this error will grow to w(T) = 1 at about T = 25. This growth holds even if no further errors, except the original error ε = 10−10 at t = 0, are introduced.
In applications the initial data and the forcing are never given exactly. Therefore, if Re λ > 0, one cannot guarantee that the answer computed is close to the correct answer. For Re λ < 0, the situation is the opposite: Initial errors in the data are wiped out. Problems corresponding to Re λ < 0 are called strongly stable. If Re λ = 0, the problem is stable but not strongly stable, and if Re λ > 0, the problem is unstable.
Next, let us perturb the forcing and consider
(1.23) 
instead of (1.20). The error term w(t) = ![]() (t) − y(t) solves
(t) − y(t) solves
(1.24) 
and we obtain by Duhamel’s principle,
![]()
Therefore, w(t) satisfies the estimate
(1.25) 
We arrive at essentially the same conclusions as those for the perturbed initial data:
![]()
![]()
There are no difficulties in generalizing this observation to linear equations with variable coefficients:
The influence of perturbations of the forcing and of the initial data depends on the behavior of the solution operator
![]()
Definition 1.3 Consider the linear initial value problem (1.26) and its solution operator S(t, s). The problem is called strongly stable, stable, or unstable if the solution operator satisfies, respectively, the following estimates:
![]()
where δ is a positive constant.
Exercise 1.6 Consider, instead of (1.20), the initial value problem for the resonance case
and the problem with perturbed initial data,
Show that the same conclusions of the nonresonance case can be drawn for w(t) = ![]() − y(t).
− y(t).
1.4 Nonlinear equations: the possibility of blow-up
Nonlinearities in the equation can produce a solution that blows up in finite time, that is, a solution that does not exist for all times. Consider, for example, the nonlinear initial value problem given by
(1.27) 
For y0 = 0 the solution is y = 0 for all times. Therefore, assume that y0 ≠ 0 in the following. To calculate the solution, we write the differential equation in the form
![]()
and integrate:
![]()
The change of variables y(s) = v gives us
and we obtain
![]()
For y0 > 0 the solution blows up at t = 1/y0 (see Figure 1.8). This blow-up or divergence of the solution at a finite time is a consequence of the nonlinearity, that is, the term y2 on the right-hand side of the equation. This behavior cannot occur in a linear problem. On the other hand, if y0 < 0, the solution y(t) exists for all t ≥ 0 and converges to zero for t → ∞ (see Figure 1.9).
Figure 1.8 y0 > 0.
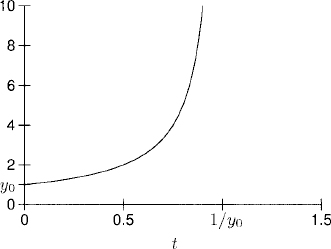
Figure 1.9 y0 < 0.

Consider now the more general problem
We give here without proof a simple version of the classical existence and uniqueness theorem for scalar ordinary differential equations (see, e.g., [3], chapt. 5).
Theorem 1.4 If f(y,t) and ∂f(y,t)/∂y are continuous functions in a rectangle Ω = [y0 − b,y0 + b] x [t0 − a, t0 + a], a, b > 0, and |f(y,t)| ≤ M on Ω, there exists a unique, continuously differentiable solution y(t) to the problem (1.28) in the interval |t − t0| ≤ Δt = min{a, b/M}.
Remark 1.5 The time interval of existence depends on how large one can choose the rectangle, and so on the initial point (y0, t0). The solution can be continued to the future by solving the equation with new initial conditions starting at the point (y(t0 + Δt), t0 + Δt). If one tries to continue the solution as much as possible, there are two possibilities:
Exercise 1.7 Show that if a smooth solution y(t) to (1.28) blows up at finite time, its derivative dy/dt blows up at the same time. Hint: Use the mean value theorem.
Exercise 1.8 Show that the converse of exercise (1.7) is false. To this end, consider the initial value problem
Explicitly find the solution y(t) and check that dy/dt → ∞ when t → (1/2)− and that, nevertheless, y(t) stays bounded.
Exercise 1.9 Is it possible that the solution of the real equation
blows up at a finite time? Explain the Answer.
1.5 Principle of linearization
Consider the initial value problem
Assume that
![]()
A simple calculation shows that the solution of (1.29) is given by
![]()
Let ε with 0 ≤ ε ![]() 1 be a small constant and consider the perturbed problem
1 be a small constant and consider the perturbed problem
Here G(t) is a smooth function with
By Section 1.3 we expect that in some time interval 0 ≤ t ≤ T,
Therefore, we make the following change of variables:
Introducing (1.32) into (1.30) gives us
![]()
The form of F gives us
We expect that |u| ≤ 1 in some time interval 0 ≤ t ≤ T, and therefore we can neglect the quadratic term εu2 to obtain the linearized equation
In Section 1.3 we discussed the growth behavior of the solutions of (1.34). It depends on the solution operator
![]()
Exercise 1.10 Prove, using the solution operator S(t, s), that the problem is strongly stable for λ < 0.
If the linearized equation is strongly stable (i.e., Re λ < 0), then
![]()
and, using (1.31), ![]() is bounded for all times. In this case one can also show that, for sufficiently small ε,
is bounded for all times. In this case one can also show that, for sufficiently small ε,
![]()
for all times. Thus, the linearized equation determines, to first approximation, the effect of the perturbation on the solution.
If the linearized equation is only stable, then
![]()
and
![]()
provided that
![]()
Therefore, the linearized equation describes the behavior of the perturbation in every time interval 0 ≤ t ≤ T with T2ε ![]() 1.
1.
If the linearized equation is unstable,
![]()
and the time interval where the linearized equation (1.34) is a good approximation of (1.33) is restricted to a time interval 0 ≤ t ≤ T with
![]()
This behavior is general in nature.
Consider the nonlinear equation
(1.35) 
Assume that the solution y(t) of this problem is known. Consider a perturbation
(1.36) 
We make the change of variables
![]()
Since
![]()
we obtain
(1.37) 
Neglecting the quadratic terms, we obtain the linearized equation
The effect of the perturbation depends on the stability properties of (1.38).
Linearization is a very important tool because it is used to show that the nonlinear problem has a unique solution locally.
1The exceptional case, μ = λ, is called the case of resonance.
2From now on we frequently use the notation ![]() ; for a precise definition, consult Section A.2.
; for a precise definition, consult Section A.2.