
10.3.1 Model and Assumptions
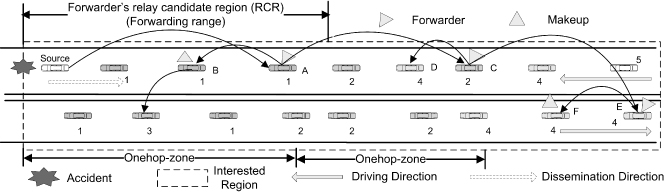
In this chapter, we present our event-driven warning message (WM) broadcast protocol using a highway scenario. Figure 10.1 shows the system model, which is a line-topology highway that may have multiple lanes. The VANET consists of vehicles equipped with on board units (OBUs) that can communicate with each other. Suppose a safety-related event (e.g. an accident) happens somewhere, where the source vehicle's OBU begins to disseminate WMs towards the interested region (IR) via broadcast. The IR is defined as the road segment of length ![]() along the message dissemination direction, which can either include only the co-directional lanes or lanes in both directions. The source is called the origin of IR, and the other boundary of IR is called the end of IR. As the width of the highway is far less than the length of IR, for simplicity we model the vehicles to be located in one dimension.
along the message dissemination direction, which can either include only the co-directional lanes or lanes in both directions. The source is called the origin of IR, and the other boundary of IR is called the end of IR. As the width of the highway is far less than the length of IR, for simplicity we model the vehicles to be located in one dimension.
Figure 10.1 VANET model and overview of the broadcast scheme. The number i near each vehicle indicates that the vehicle receives the WM upon the ith (re)broadcast. © 2011 IEEE. Reprinted, with permission, from Z. Yang, M. Li and W. Lou, “CodePlay: Live Multimedia Streaming in VANETs using Symbol-Level Network Coding”, IEEE Transactions on Mobile Computing (TMC), 2011.
We assume vehicles are GPS-capable and each vehicle obtains its location in real time. This is also assumed by many other works in the literature (C-Varghese et al. 2006; Korkmaz and Ekici 2004; Nadeem et al. 2006; T-Moreno 2007; Tonguz et al. 2010; Torrent-Moreno et al. 2009; Wisitpongphan et al. December 2007b). When GPS is not available (e.g. in tunnels), vehicles use complementary methods to estimate their locations. For example, this can be done by combining the vehicle speed measured by the speedometer with the GPS map. Vehicles are also are aware of the existence and locations of all neighboring vehicles, as they broadcast one-hop beacon messages every 100 ms (http://www.standards.its.dot.gov/Documents/advisories/dsrcadvisory.htm). These beacons are routine safety messages, and warning messages are event-driven. They share the control channel (Jiang et al. 2006).
The network of interest can be modeled as an undirected graph G(V, E), where V is the set of nodes within the IR. We adopt the probabilistic radio propagation model, where the probability that a node v at a distance x from a node u receives a broadcast packet directly from u is expressed as a (decreasing) function with x, which is denoted as Pr(x). This function accounts for channel fading; it can either be derived from a propagation model Killat and Hartenstein (n.d.) or measured from practice. Assuming identical node transmission power, we can associate each bidirectional link l = (u, v) ∈ E with a packet reception probability Pr(d(u, v)), where d(u, v) is the distance between u and v. In addition, the packet reception at each vehicle is assumed to be independent.
10.3.2 Objectives
In this chapter, we aim to provide a reliable broadcast service in terms of ensuring the packet reception ratio (PRR) of the network of interest to be larger than a threshold Pth (PRR ≥ Pth, Pth ∈ (0, 1)). This is called the network PRR requirement.
Definition 10.1 (Packet reception ratio PRR) Given a network G and a source s, PRR is defined as the percentage of nodes in IR that receive a WM originated from s.
In the meantime, it is also very important for vehicles to be warned in a timely manner. Since the broadcast reception delay (tv, m) of WM m at each vehicle v is related to v's distance to the source (dv), we define the individual dissemination rate as dv/tv, m. The dissemination rate is then defined as the individual dissemination rates averaged among all WMs sent and vehicles in the IR. Therefore, the second goal is to reach high dissemination rate. The PRR and dissemination rate capture the application level performances.
Finally, in WM broadcast it is desirable to minimize the transmission overhead, which is defined as the expected total number of transmissions incurred for each WM. Unnecessary transmissions take up bandwidth, increase the channel access delay and the chance of packet collision. This, in turn, degrades the broadcast performance.