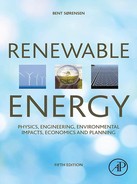

Assuming that CD, CL, and W are constant over the area A=∫c dz of the airfoil, the work done by a uniform (except in the vicinity of the airfoil) wind field uin on a device (e.g., a ship) moving with a velocity U can be derived from (4.58) and (4.59),
The angle β between uin and U (see Fig. 4.14) may be maintained by a rudder. The power coefficient (4.55) becomes
with f=U/uin. For CL=0, the maximum Cp is 4CD/27, obtained for f=1/3 and β=0, whereas the maximum Cp for high lift-to-drag ratios L/D is obtained for β close to 1/2π and f around 2CL/(3CD). In this case, the maximum Cp may exceed CL by one to two orders of magnitude (Wilson and Lissaman, 1974).
It is quite difficult to maintain the high speeds U required for optimum performance in a linear motion of the airfoil, and it is natural to focus the attention on rotating devices, in case the desired energy form is shaft or electric power and not propulsion. Wind-driven propulsion in the past (mostly of ships at sea) has been restricted to U/uin values far below the optimum region for high L/D airfoils (owing to friction against the water), and wind-driven propulsion on land or in the air has received little attention.
4.3.2 Propeller-type converters
Propellers have been extensively used in aircraft to propel the air in a direction parallel to that of the propeller axis, thereby providing the necessary lift force on the airplane wings. Propeller-type rotors are similarly used for windmills, but here the motion of the air (i.e., the wind) makes the propeller, which should be placed with its axis parallel to the wind direction, rotate, thus providing the possibility of power extraction. The propeller consists of a number of blades that are evenly distributed around the axis (cf. Fig. 4.15), with each blade having an aerodynamic profile designed to produce a high lift force, as discussed in section 4.3.1. If there are two or more blades, the symmetrical mounting ensures a symmetrical mass distribution, but if only one blade is used it must be balanced by a counterweight.

4.3.2.1 Theory of non-interacting streamtubes
In order to describe the performance of a propeller-type rotor, the forces on each element of the blade must be calculated, including the forces produced by the direct action of the wind field on each individual element as well as the forces arising as a result of interactions between different elements on the same or on different blades. Since the simple airfoil theory outlined in section 4.3.1 deals only with the forces on a given blade segment, in the absence of the other ones and also without the inclusion of “edge effects” from “cutting out” this one segment, it is tempting as a first approximation to treat the different radial segments of each blade as independent. Owing to the symmetrical mounting of blades, the corresponding radial segments of different blades (if more than one) may be treated together for a uniform wind field, considering, as indicated in Fig. 4.15, an annulus-shaped streamtube of flow, bordered by streamlines intersecting the rotor plane at radial distances r and r + Dr. The approximation of independent contributions from each streamtube, implying that radially induced velocities (ur in Fig. 4.10) are neglected, allows the total shaft power to be expressed as
where dE/dr depends only on the conditions of the streamtube at r. Similar sums of independent contributions can in the same order of approximation be used to describe other overall quantities, such as the axial force component T and the torque Q (equal to the power E divided by the angular velocity Ω of the propeller).
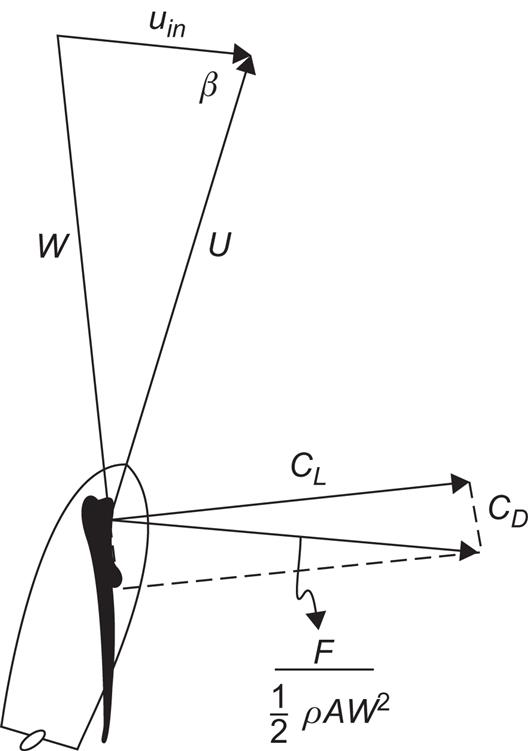
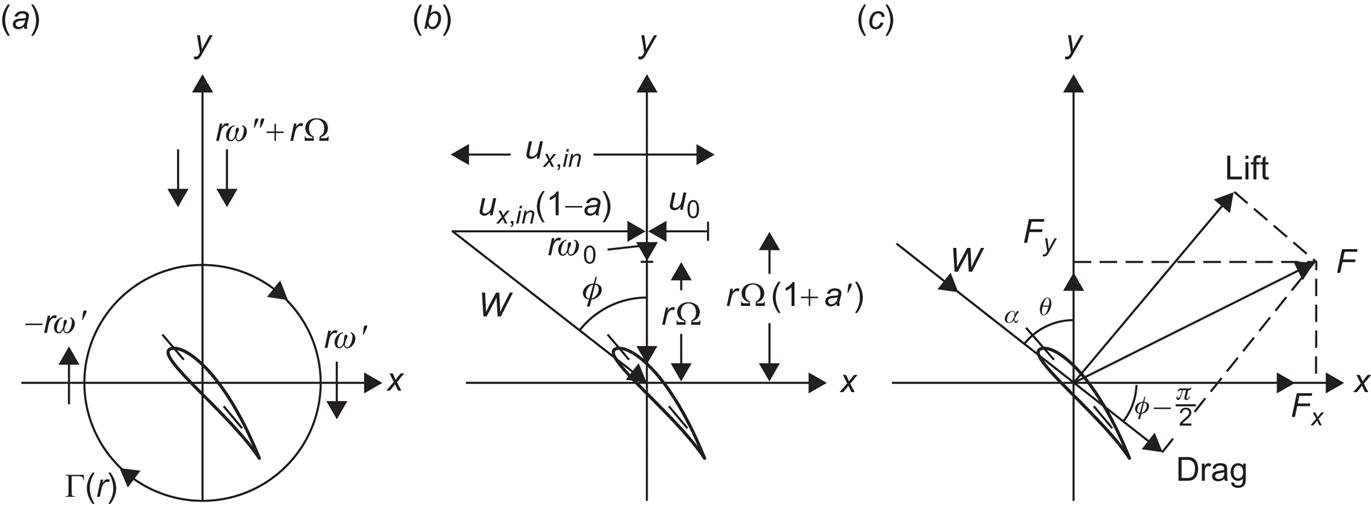
In Fig. 4.16, a section of a wing profile (blade profile) is seen from a direction perpendicular to the cut. The distance of the blade segment from the axis of rotation is r, and its velocity rΩ is directed along the y-axis. This defines a coordinate system with a fixed x-axis along the rotor axis and moving y- and z-axes such that the blade segment is fixed relative to the co-ordinate system.
In order to utilize the method developed in section 4.3.1, the apparent wind velocity W to be used in (4.59) must be determined. It is given by (4.58) only if the velocity induced by, and remaining in the wake of, the device, uind=uout−uin (cf. Fig. 4.10), is negligible. Since the radial component ur of uind has been neglected, uind has two components, one along the x-axis,
[cf. (4.52)], and one in the tangential direction,
when expressed in a non-rotating co-ordinate system (the second equality defines a quantity a′, called the tangential interference factor).
W is determined by the air velocity components in the rotor plane. From the momentum considerations underlying (4.52), the induced x-component u0 in the rotor plane is seen to be
(4.60)
In order to determine rω0, the induced velocity of rotation of the air in the rotor plane, one may use the following argument (Glauert, 1935). The induced rotation is partly due to the rotation of the wings and partly due to the non-zero circulation (4.57) around the blade segment profiles (see Fig. 4.16a). This circulation may be considered to imply an induced air velocity component of the same magnitude, |rω′|, but with opposite direction in front of and behind the rotor plane. If the magnitude of the component induced by the wing rotation is called rω″ in the fixed co-ordinate system, it will be rω″ + rΩ and directed along the negative y-axis in the co-ordinate system following the blade. It has the same sign in front of and behind the rotor. The total y-component of the induced air velocity in front of the rotor is then −(rω″ + rΩ + rω′), and the tangential component of the induced air velocity in the fixed co-ordinate system is −(rω″−rω′), still in front of the rotor. But here there should be no induced velocity at all. This follows, for example, from performing a closed line integral of the air velocity v along a circle with radius r and perpendicular to the x-axis. This integral should be zero because the air in front of the rotor has been assumed to be irrotational,
implying ω″=ω′. This identity also fixes the total induced tangential air velocity behind the rotor, rωind=rω″+rω′=2rω″, and in the rotor plane (note that the circulation component rω′ is here perpendicular to the y-axis),
(4.61)
The apparent wind velocity in the co-ordinate system moving with the blade segment, W, is now determined as seen in Fig. 4.16b. Its x-component is ux, given by (4.52), and its y-component is obtained by taking (4.61) to the rotating co-ordinate system,
(4.62a)
(4.62b)
The lift and drag forces (Fig. 4.16c) are now obtained from (4.61) (except that the two components are no longer directed along the co-ordinate axes), with values of CD, CL, and c pertaining to the segments of wings at the streamtube intersecting the rotor plane at the distance r from the axis. As indicated in Figs. 4.16b and c, the angle of attack, α, is the difference between the angle ϕ, determined by
(4.63)
and the pitch angle θ between blade and rotor plane,
(4.64)
Referred to the co-ordinate axes of Fig. 4.16, the force components for a single blade segment become
(4.65a)
(4.65b)
and the axial force and torque contributions from a streamtube with B individual blades are given by
(4.66a)
(4.66b)
Combining (4.66) with equations expressing momentum and angular momentum conservation for each of the (assumed non-interacting) streamtubes, a closed set of equations is obtained. Equating the momentum change of the wind in the x-direction to the axial force on the rotor part intersected by an individual streamtube [i.e., (4.48) and (4.49) with A=2πr], one obtains
(4.67)
and similarly equating the torque on the streamtube rotor part to the change in angular momentum of the wind (from zero to r × uindt), one gets
(4.68)
Inserting W=ux,in(1−a)/sin ϕ or W=rΩ (1+a′)/cos ϕ (cf. Fig. 4.16c) as necessary, one obtains a and a′ expressed in terms of ϕ by combining (4.65)–(4.68). Since, on the other hand, ϕ depends on a and a′ through (4.63) and (4.62), an iterative method of solution should be used. Once a consistent set of (a, a′, ϕ)-values has been determined as function of r [using a given blade profile implying known values of θ, c, CD(α), and CL(α) as function of r], either (4.66) or (4.67) and (4.68) may be integrated over r to yield the total axial force, total torque, or total shaft power E=Ω Q.
One may also determine the contribution of a single streamtube to the power coefficient (4.55),
(4.69)
The design of a rotor may utilize Cp(r) for a given wind speed ux,indesign to optimize the choice of blade profile (CD and CL), pitch angle (θ), and solidity (Bc/(πr)) for given angular velocity of rotation (Ω). If the angular velocity Ω is not fixed (as it might be by use of a suitable asynchronous electrical generator, except at start and stop), a dynamic calculation involving dΩ/dt must be performed. Not all rotor parameters need to be fixed. For example, the pitch angles may be variable, by rotation of the entire wing around a radial axis, such that all pitch angles θ (r) may be modified by an additive constant θ0. This type of regulation is useful in order to limit the Cp-drop when the wind speed moves away from the design value ![]() The expressions given above would then give the actual Cp for the actual setting of the pitch angles given by θ (r)design+θ0 and the actual wind speed ux,in, with all other parameters left unchanged.
The expressions given above would then give the actual Cp for the actual setting of the pitch angles given by θ (r)design+θ0 and the actual wind speed ux,in, with all other parameters left unchanged.
In introducing the streamtube expressions (4.67) and (4.68), it has been assumed that the induced velocities, and thus a and a′, are constant along the circle periphery of radius r in the rotor plane. As the model used to estimate the magnitude of the induced velocities (Fig. 4.16a) is based on being near to a rotor blade, it is expected that the average induced velocities in the rotor plane, u0 and rω0, are smaller than the values calculated by the above expressions, unless the solidity is very large. In practical applications, it is customary to compensate by multiplying a and a′ by a common factor, F, less than unity and a function of B, r, and ϕ (see, for example, Wilson and Lissaman, 1974).
Furthermore, edge effects associated with the finite length R of the rotor wings have been neglected, as have the “edge” effects at r=0 due to the presence of the axis, transmission machinery, etc. These effects may be described in terms of trailing vortices shed from the blade tips and blade roots and moving in helical orbits away from the rotor in its wake. Vorticity is a name for the vector field rotv, and the vortices connected with the circulation around the blade profiles (Fig. 4.16a) are called bound vorticity. This can “leave” the blade only at the tip or at the root. The removal of bound vorticity is equivalent to a loss of circulation I (4.57) and hence a reduction in the lift force. Its dominant effect is on the tangential interference factor a′ in (4.68), and so it has the same form and may be treated on the same footing as the corrections due to finite blade number. (Both are often referred to as tip losses, since the correction due to finite blade number is usually appreciable only near the blade tips, and they may be approximately described by the factor F introduced above.) Other losses may be associated with the “tower shadow,” etc.
4.3.2.2 Model behavior of power output and matching to load
A calculated overall Cp for a three-bladed, propeller-type wind energy converter is shown in Fig. 4.17, as a function of the tip-speed ratio,
and for different settings of the overall pitch angle, θ0. It is clear from (4.69) and the equations for determining a and a′ that Cp depends on the angular velocity Ω and the wind speed ux,in only through the ratio λ. Each blade has been assumed to be an airfoil of the type NACA 23012 (cf. Fig. 4.12), with chord c and twist angle θ changing along the blade from root to tip, as indicated in Fig. 4.18. A tip-loss factor F has been included in the calculation of sets of corresponding values of a, a′, and ϕ for each radial station (each “streamtube”), according to the Prandtl model described by Wilson and Lissaman (1974). The dashed regions in Fig. 4.17 correspond to values of the product aF (corresponding to a in the expression without tip loss) larger than 0.5. Since the axial air velocity in the wake is ux,out=ux,in(1−2 aF) [cf. (4.52) with F=1], aF > 0.5 implies reversed or re-circulating flow behind the wind energy converter, a possibility that has not been included in the above description. The Cp values in the dashed regions may thus be inaccurate and presumably overestimated.


Figure 4.17 shows that, for negative settings of the overall pitch angle θ0, the Cp distribution on λ values is narrow, whereas it is broad for positive θ0 of modest size. For large positive θ0, the important region of Cp moves to smaller λ values. The behavior of Cp(λ) in the limit of λ approaching zero is important for operating the wind energy converter at small rotor angular velocities and, in particular, for determining whether the rotor will be self-starting, as discussed in more detail below.
For a given angular speed Ω of the rotor blades, the power coefficient curve specifies the fraction of the power in the wind that is converted, as a function of the wind speed ux,in. Multiplying Cp by ![]() where the rotor area is A=πR2 (if “coning” is disregarded, i.e., the blades are assumed to be in the plane of rotation), the power transferred to the shaft can be obtained as a function of wind speed, assuming the converter to be oriented (“yawed”) such that the rotor plane is perpendicular to the direction of the incoming wind. Figures 4.19 and 4.20 show such plots of power E, as functions of wind speed and overall pitch angle, for two definite angular velocities (Ω=4.185 and 2.222 rad s−1, if the length of the wings is R=27 m). For the range of wind speeds encountered in the planetary boundary layer of the atmosphere (e.g., at heights between 25 and 100 m), a maximum power level around 4000 W per average square meter swept by the rotor (10 MW total) is reached for the device with the higher rotational speed (tip speed RΩ=113 Ms−1), whereas about 1000 W m−2 is reached by the device with the lower rotational velocity (RΩ=60 m s−1).
where the rotor area is A=πR2 (if “coning” is disregarded, i.e., the blades are assumed to be in the plane of rotation), the power transferred to the shaft can be obtained as a function of wind speed, assuming the converter to be oriented (“yawed”) such that the rotor plane is perpendicular to the direction of the incoming wind. Figures 4.19 and 4.20 show such plots of power E, as functions of wind speed and overall pitch angle, for two definite angular velocities (Ω=4.185 and 2.222 rad s−1, if the length of the wings is R=27 m). For the range of wind speeds encountered in the planetary boundary layer of the atmosphere (e.g., at heights between 25 and 100 m), a maximum power level around 4000 W per average square meter swept by the rotor (10 MW total) is reached for the device with the higher rotational speed (tip speed RΩ=113 Ms−1), whereas about 1000 W m−2 is reached by the device with the lower rotational velocity (RΩ=60 m s−1).


The rotor has been designed to yield a maximum Cp at about λ=9 (Fig. 4.17), corresponding to ux,in=12.6 and 6.6 m s−1 in the two cases. At wind speeds above these values, the total power varies less and less strongly, and for negative pitch angles it even starts to decrease with increasing wind speeds in the range characterizing “stormy weather.” This phenomenon can be used to make the wind energy converter self-regulating, provided that the “flat” or “decreasing” power regions are suitably chosen and that the constancy of the angular velocity at operation is ensured by, for example, coupling the shaft to a suitable asynchronous electricity generator (a generator allowing only minute changes in rotational velocity, with the generator angular speed Ωg being fixed relative to the shaft angular speed Ω, e.g., by a constant exchange ratio n=Ωg/Ω of a gearbox). Self-regulating wind energy converters with fixed overall pitch angle θ0 and constant angular velocity have long been used for AC electricity generation (Juul, 1964).
According to its definition, the torque Q=E/Ω can be written
(4.70)
and Fig. 4.21 shows Cp/λ as a function of λ for the same design as the one considered in Fig. 4.17. For pitch angles θ0 less than about −3°, Cp/λ is negative for λ=0, whereas the value is positive if θ0 is above the critical value of about −3°. The corresponding values of the total torque (4.70), for a rotor with radius R=27 m and overall pitch angle θ0=0°, are shown in Fig. 4.22a, as a function of the angular velocity Ω=λux,in/R and for different wind speeds. The small dip in Q for low rotational speeds disappears for higher pitch angles θ0.


The dependence of the torque at Ω=0 on pitch angle is shown in Fig. 4.23 for a few wind speeds. Advantage can be taken of the substantial increase in starting torque with increasing pitch angle, in case the starting torque at the pitch angle desired at operating angular velocities is insufficient and provided the overall pitch angle can be changed. In that case, a high overall pitch angle is chosen to start the rotor from Ω=0, where the internal resistance (friction in bearings, gearbox, etc.) is large. When an angular speed Ω of a few degrees per second is reached, the pitch angle is diminished to a value close to the optimal one (otherwise the torque will pass a maximum and soon start to decrease again, as seen from, for example, the θ0=60° curve in Fig. 4.21). Usually, the internal resistance diminishes as soon as Ω is non-zero. The internal resistance may be represented by an internal torque, Q0(Ω), so that the torque available for some load, “external” to the wind power to shaft power converter (e.g., an electric generator), may be written

If the “load” is characterized by demanding a fixed rotational speed Ω (such as the asynchronous electric generator), it may be represented by a vertical line in the diagram shown in Fig. 4.22a. As an example of the operation of a wind energy generator of this type, the dashed lines (with accompanying arrows) in Fig. 4.22a describe a situation with initial wind speed of 8 m s−1, assuming that this provides enough torque to start the rotor at the fixed overall pitch angle θ0=0° (i.e., the torque produced by the wind at 8 m s−1 and Ω=0 is above the internal torque Q0, here assumed to be constant). The excess torque makes the angular velocity of the rotor, Ω, increase along the specific curve for ux,in=8 m s−1, until the value Ω0 characterizing the electric generator is reached. At this point, the load is connected and the wind energy converter begins to deliver power to the load area. If the wind speed later increases, the torque will increase along the vertical line at Ω=Ω0 in Fig. 4.22a, and if the wind speed decreases, the torque will decline along the same vertical line until it reaches the internal torque value Q0. Then the angular velocity diminishes and the rotor is brought to a halt.
An alternative type of load may not require a constant angular velocity. Synchronous DC electric generators are of this type, providing an increasing power output with increasing angular velocity (assuming a fixed exchange ratio between rotor angular velocity Ω and generator angular velocity Ωg). Instead of staying on a vertical line in the torque-versus-Ω diagram, for varying wind speed, the torque now varies along some fixed, monotonically increasing curve characterizing the generator. An optimal synchronous generator would be characterized by a Q(Ω) curve that for each wind speed ux,in corresponds to the value of Ω=λux,in/R that provides the maximum power coefficient Cp (Fig. 4.17). This situation is illustrated in Fig. 4.22b, with a set of dashed curves again indicating the torque variation for an initial wind speed of 8 m s−1, followed by an increasing and later again decreasing wind speed. In this case, the Q=Q0 limit is finally reached at a very low angular velocity, indicating that power is still delivered during the major part of the slowing-down process.
4.3.2.3 Non-uniform wind velocity
The velocity field of the wind may be non-uniform in time as well as in spatial distribution. The influence of time variations in wind speed on power output of a propeller-type wind energy converter is touched upon in the previous subsection, although a detailed investigation involving the actual time dependence of the angular velocity Ω is not included. In general, the direction of the wind velocity is also time dependent, and the conversion device should be able to successively align its rotor axis with the long-range trends in wind direction, or suffer a power reduction that is not just the cosine to the angle β between the rotor axis and the wind direction (yaw angle), but involves calculating the performance of each blade segment for an apparent wind speed W and angle of attack α different from the ones previously used, and no longer axially symmetric. This means that the quantities W and α (or ϕ) are no longer the same inside a given annular streamtube, but they depend on the directional position of the segment considered (e.g., characterized by a rotational angle ϕ in a plane perpendicular to the rotor axis).
Assuming that both the wind direction and the wind speed are functions of time and of height h (measured from ground level or from the lower boundary of the velocity profile z0 discussed in section 2.5.2), but that the direction remains horizontal, then the situation will be as depicted in Fig. 4.24. The co-ordinate system (x0, y0, z0) is fixed and has its origin in hub height h0, where the rotor blades are fastened. Consider now a blade element at a distance r from the origin, on the ith blade. The projection of this position on to the (y0, z0)-plane is turned the angle ψi from vertical, where
(4.71)
at the time t. The coning angle δ is the angle between the blade and its projection onto the (y0, z0)-plane, and the height of the blade element above the ground is
(4.72)
where h0 is the hub height. The height h enters as a parameter in the wind speed uin=juin(h, t)j and the yaw angle β=β (h, t), in addition to time.

Now, an attempt can be made to copy the procedure used for a uniform wind velocity along the rotor axis, i.e., to evaluate the force components for an individual streamtube both by the momentum consideration and by the lift and drag approach of section 4.3.1. The individual streamtubes can no longer be taken as annuli, but must be of an area As (perpendicular to the wind direction) small enough to permit the neglect of variations in wind velocity over the area at a given time. It will still be assumed that the flows inside different streamtubes do not interact, and also, for simplicity, the streamtubes will be treated as “straight lines,” i.e., not expanding or bending as they pass the region of the conversion device (as before, this situation arises when induced radial velocities are left out).
Consider first the “momentum equation” (4.48), with s denoting “in the streamwise direction” or “along the streamtube,”
This force has components along the x-, y-, and z-directions of the local coordinate system of a blade turned the angle ψ from vertical (cf. Fig. 4.69). The y-direction is tangential to the rotation of the blade element, and, in addition to the component of Fs, there may be an induced tangential velocity utind (and force) of the same type as the one considered in the absence of yaw (in which case Fs is perpendicular to the y-axis). The total force components in the local co-ordinate system are thus
(4.73)
From the discussion of Fig. 4.10, (4.49) and (4.52),
and, in analogy with (4.61), a tangential interference factor a′ may be defined by
However, the other relation contained in (4.61), from which the induced tangential velocity in the rotor plane is half the one in the wake, cannot be derived in the same way without the assumption of axial symmetry. Instead, the variation in the induced tangential velocity as a function of rotational angle ψ is bound to lead to crossing of the helical wake strains and it will be difficult to maintain the assumption of non-interacting streamtubes. Here, the induced tangential velocity in the rotor plane will still be taken as 1/2utind, an assumption which at least gives reasonable results in the limiting case of a nearly uniform incident wind field and zero or very small yaw angle.
Secondly, the force components may be evaluated from (4.63) to (4.65) for each blade segment, defining the local co-ordinate system (x, y, z) as in Fig. 4.24 with the z-axis along the blade and the y-axis in the direction of the blade’s rotational motion. The total force, averaged over a rotational period, is obtained by multiplying by the number of blades, B, and by the fraction of time each blade spends in the streamtube. Defining the streamtube dimensions by an increment Dr in the z-direction and an increment dψ in the rotational angle ψ, each blade spends the time fraction dψ/(2π) in the streamtube, at constant angular velocity Ω. The force components are then
(4.74)
 (4.74)
(4.74)
in the notation of (4.65). The angles ϕ and α are given by (4.63) and (4.64), but the apparent velocity W is the vector difference between the streamwise velocity uin+1/2 usind and the tangential velocity rΩ cos δ+1/2 utind, both taken in the rotor plane. From Fig. 4.24,
(4.75)
 (4.75)
(4.75)
The appropriate W2 to insert into (4.74) is Wx2+Wy2. Finally, the relation between the streamtube area As and the increments Dr and dψ must be established. As indicated in Fig. 4.25, the streamtube is approximately a rectangle with sides dL and dL′, given by
(4.76)
 (4.76)
(4.76)
and

Now, for each streamtube, a and a′ are obtained by equating the x- and y-components of (4.73) and (4.74) and using the auxiliary equations for (W, ϕ) or (Wx, Wy). The total thrust and torque are obtained by integrating Fx and r cos δ Fy, over Dr and dψ (i.e., over all streamtubes).
4.3.2.4 Restoration of wind profile in wake, and implications for turbine arrays
For a wind energy converter placed in the planetary boundary layer (i.e., in the lowest part of the Earth’s atmosphere), the reduced wake wind speed in the streamwise direction, us,out, will not remain below the wind speed us,in of the initial wind field, provided that this is not diminishing with time. The processes responsible for maintaining the general kinetic motion in the atmosphere (cf. section 2.3.1), making up for the kinetic energy lost by surface friction and other dissipative processes, will also act in the direction of restoring the initial wind profile (speed as function of height) in the wake of a power-extracting device by transferring energy from higher air layers (or from the “sides”) to the partially depleted region (Sørensen, 1996). The large amounts of energy available at greater altitude (cf. Fig. 3.31) make such processes possible almost everywhere at the Earth’s surface and not just at those locations where new kinetic energy is predominantly being created (cf. Fig. 2.60).
In the near wake, the wind field is non-laminar, owing to the induced tangential velocity component, utind, and owing to vorticity shed from the wing tips and the hub region (cf. discussion of Figs. 4.16 and (4.57)). It is then expected that these turbulent components gradually disappear further downstream in the wake, as a result of interactions with the random eddy motion of different scales present in the “unperturbed” wind field. “Disappear” here means “get distributed on a large number of individual degrees of freedom,” so that no contributions to the time-averaged quantities considered [cf. (2.21)] remain. For typical operation of a propeller-type wind conversion device, such as the situations illustrated in Figs. 4.19 and 4.20, the tangential interference factor a′ is small compared to the axial interference factor a, implying that the most visible effect of the passage of the wind field through the rotor region is the change in streamwise wind speed. Based on wind tunnel measurements, this is a function of r, the distance of the blade segment from the hub center, as illustrated in Fig. 4.27. The induced r-dependence of the axial velocity is seen to gradually smear out, although it is clearly visible at a distance of two rotor radii in the set-up studied.


Fig. 4.28 suggests that, under average atmospheric conditions, the axial velocity, us,in, will be restored to better than 90% at about 10 rotor diameters behind the rotor plane and better than 80% at a distance of 5–6 rotor diameters behind the rotor plane, but restoration is rather strongly dependent on the amount of turbulence in the “undisturbed” wind field.

A second wind energy converter may be placed behind the first one, in the wind direction, at a location where the wind profile and magnitude are reasonably well restored. According to simplified investigations in wind tunnels (Fig. 4.28), supported by field measurements behind buildings, forests, and fences, a suitable distance would seem to be 5–10 rotor diameters (increasing to over 20 rotor diameters if “complete restoration” is required). If there is a prevailing wind direction, the distance between conversion units perpendicular to this direction may be smaller (essentially determined by the induced radial velocities, which were neglected in the preceding subsections, but appear qualitatively in Fig. 4.10). If, on the other hand, several wind directions are important, and the converters are designed to be able to “yaw against the wind,” then the distance required by wake considerations should be kept in all directions.
More severe limitations may possibly be encountered with a larger array of converters, say, distributed over an extended area with average spacing X between units. Even if X is chosen so that the relative loss in streamwise wind speed is small from one unit to the next, the accumulated effect may be substantial, and the entire boundary layer circulation may become altered in such a way that the power extracted decreases more sharply than expected from the simple wake considerations. Thus, large-scale conversion of wind energy may even be capable of inducing local climatic changes.
A detailed investigation of the mutual effects of an extended array of wind energy converters and the general circulation on each other requires a combination of a model of the atmospheric motion, e.g., along the lines presented in section 2.3.1, with a suitable model of the disturbances induced in the wake of individual converters. In one of the first discussions of this problem, Templin (1976) considered the influence of an infinite two-dimensional array of wind energy converters with fixed average spacing on the boundary layer motion to be restricted to a change of the roughness length z0 in the logarithmic expression (see section 2.5.1) for the wind profile, assumed to describe the wind approaching any converter in the array. The change in z0 can be calculated from the stress τind exerted by the converters on the wind, due to the axial force Fx in (4.65) or (4.67), which according to (4.51) can be written
with S being the average ground surface area available for each converter and A/S being the “density parameter,” equal to the ratio of rotor-swept area to ground area. For a quadratic array with regular spacing, S may be taken as X2. According to section 2.5.1, ux,in taken at hub height h0 can, in the case of a neutral atmosphere, be written
where τ0 is the stress in the absence of wind energy converters, and z′0 is the roughness length in the presence of the converters, which can now be determined from this equation and τind from the previous one.
Figure 4.29 shows the results of a calculation for a finite array of converters (Taylor et al., 1993) using a simple model with fixed loss fractions (Jensen, 1994). This model is incapable of reproducing the fast restoration of winds through the turbine array, presumably associated with the propagation of the enhanced wind regions created just outside the swept areas (as seen in Fig. 4.27). A three-dimensional fluid dynamics model is required for describing the details of array shadowing effects. Such calculations are in principle possible, but so far no convincing implementation has been presented. The problem is the very accurate description needed for the complex three-dimensional flows around the turbines and for volumes comprising the entire wind farm of maybe hundreds of turbines. This is an intermediate regime between the existing three-dimensional models for gross wind flow over complex terrain and the detailed models of flow around a single turbine used in calculations of aerodynamic stability.

4.3.2.5 Size limits
Horizontal axis, propeller-type wind generators have increased in size with time, and by 2016, the largest commercial turbines have rotor diameters of around 160 m (4C Offshore Consultancy UK, 2016). Although fiber materials can be produced with strengths sufficient to further increase the blade length, the weight of the part of the blades furthest from the hub is becoming a problem and efforts are ongoing partly to find new ultralight materials of high strength, and partly to reconsider the blade geometry and the inside reinforcement required for making a hollow blade strong and durable. Making the width of the blade decrease faster toward the end is one solution, even if it may compromise the most efficient profile selection. Material choice and design of the inside reinforcement is another optimization feature studied with the purpose of maintaining the necessary strength and yet keeping weight down. Figure 4.26 shows the cross section of a design currently favored, and a model calculation for determining the optimum way of placing the mass of blade materials (Forcier and Joncas, 2012). However, it is not unlikely that a practical limit to blade length is in sight, because at some point, increasing the rotor diameter of a horizontal axis turbine may not entail any economic advantage, even if it could be achieved by introducing new technical ideas. In the United States, an ongoing project is exploring the possibility of using blade materials much more flexible (allowed to bend substantially) than those of current technology, and with hinges allowing the blades to lie flat along the wind direction at high wind speeds (ARPA-E, 2015; Griffith, 2016). One may worry that the ease of bending contributes to giving such blades a shorter life. Blades for wind turbines are supposed to last for some 25 years, which leaves little room for frequent large-amplitude bending at the current level of materials technology.
4.3.2.6 Floating offshore wind turbines
One of the first suggestions to place wind turbines at the higher winds (see Fig. 6.30) found offshore was made by Musgrove (1978). Implementation started in Denmark during the 1990s. While current offshore wind arrays are sitting on foundations, it has been suggested to use floating wind turbines placed at water depths too large for foundations. Tests of various designs for buoyancy stabilization (platforms, cylinders, mooring, anchors) have been ongoing in Europe and Japan (Anonymous, 2016a), based on floating platforms for oil and gas extraction. Whether and under what conditions the cost implications are favorable remains to be seen. The same issue has been discussed for oil and gas platforms, where the main advantage of avoiding foundation is stated to be that the same floating structure design can be used everywhere. This would not seem relevant for wind farms, where the economy of mass production is anyway present due to the usually over 100 turbines installed within each farm.
4.3.2.7 Offshore foundation issues
The current surge in power plants with wind turbines placed offshore, typically in shallow waters of up to 50 m depth, relies on the use of low-cost foundation methods developed earlier for harbor and oil-well uses. The best design depends on the material constituting the local water floor, as well as local hydrological conditions, including strength of currents and icing problems. Breakers are currently used to prevent ice from damaging the structure. The most common structures in place today are shown in Fig. 4.30: a concrete caisson (Fig. 4.30a) or the steel cylinder solutions shown in Fig. 4.30b and c. The monopile solution (Fig. 4.30c) has been selected for several recent projects such as the Samsø wind farm in the middle of Denmark (Birck and Gormsen, 1999; Offshore Windenergy Europe, 2003). Employing the sea-bed suction effect (Fig. 4.30b) may help cope with short-term gusting forces, while the general stability must be ensured by the properties of the overall structure itself. The option of offshore deployment is of course relevant not just for horizontal axis machines but for all types of wind converters, including those described below in section 4.3.3.

4.3.3 Cross-wind and other alternative converter concepts
Wind energy converters of the crosswind type have the rotor axis perpendicular to the wind direction. The rotor axis may be horizontal, as in wheel-type converters (in analogy to waterwheels), or vertical, as in the panemones used in Iran and China. The blades (ranging from simple “paddles” to optimized airfoil sections) will be moving with and against the wind direction on alternative sides of the rotor axis, necessitating some way of emphasizing the forces acting on the blades on one side. Possible ways are simply to shield half of the swept area, as in the Persian panemones (Wulff, 1966); to curve the “paddles” so that the (drag) forces are smaller on the convex than on the concave side, as in the Savonius rotor (Savonius, 1931); or to use aerodynamically shaped wing blades producing high lift forces for wind incident on the “front edge,” but small or inadequate forces for wind incident on the “back edge,” as in the Darrieus rotor (cf. Fig. 4.31) and related concepts. Another possibility is to allow for changes in the pitch angle of each blade, as, for example, achieved by hinged vertical blades in the Chinese panemone type (Li, 1951). In this case the blades on one side of a vertical axis have favorable pitch angles, while those on the other side have unfavorable settings. Apart from shielded ones, vertical axis cross-wind converters are omnidirectional, i.e., they accept any horizontal wind direction on equal footing.

4.3.3.1 Performance of a Darrieus-type converter
The performance of a cross-wind converter, such as the Darrieus rotor shown in Fig. 4.31, may be calculated in a way similar to that used in section 4.3.2, deriving the unknown, induced velocities by comparing expressions of the forces in terms of lift and drag on the blade segments with expressions in terms of the momentum changes between incident wind and wake flow. In addition, the flow may be divided into a number of streamtubes (assumed to be non-interacting), according to assumptions about the symmetries of the flow field. Figure 4.21 gives an example of the streamtube definitions for a two-bladed Darrieus rotor with angular velocity Ω and a rotational angle ψ describing the position of a given blade, according to (4.71). The blade chord, c, has been illustrated as constant, although it may actually be taken as varying to give the optimum performance for any blade segment at the distance r from the rotor axis. As in the propeller rotor case, it is not practical to extend the chord increase to the regions near the axis.
The bending of the blade, characterized by an angle δ (h) depending on the height h (the height of the rotor center is denoted h0), may be taken as a troposkien curve (Blackwell and Reis, 1974), characterized by the absence of bending forces on the blades when they are rotating freely. Since the blade profiles encounter wind directions at both positive and negative forward angles, the profiles are often taken as symmetrical (e.g., NACA 00XX profiles).
Assuming, as in section 4.3.2, that the induced velocities in the rotor region are half of those in the wake, the streamtube expressions for momentum and angular momentum conservation analogous to (4.67) and (4.68) are
(4.77)
 (4.77)
(4.77)
where the axial interference factor a is defined as in (4.60), and where the streamtube area As corresponding to height and angular increments dh and dψ is (cf. Fig. 4.31)
The cross wind–induced velocity ![]() is not of the form (4.61), since the tangent to the blade’s rotational motion is not along the y0-axis. The sign of
is not of the form (4.61), since the tangent to the blade’s rotational motion is not along the y0-axis. The sign of ![]() will fluctuate with time and for low chordal ratio c/R (R being the maximum value of r) it may be permitted to put Fy0 equal to zero (Lissaman, 1976; Strickland, 1975). This approximation is made in the following. It is also assumed that the streamtube area does not change by passage through the rotor region and that individual streamtubes do not interact (these assumptions being the same as those made for the propeller-type rotor).
will fluctuate with time and for low chordal ratio c/R (R being the maximum value of r) it may be permitted to put Fy0 equal to zero (Lissaman, 1976; Strickland, 1975). This approximation is made in the following. It is also assumed that the streamtube area does not change by passage through the rotor region and that individual streamtubes do not interact (these assumptions being the same as those made for the propeller-type rotor).
The forces along the instantaneous x- and y-axes due to the passage of the rotor blades at a fixed streamtube location (h, ψ) can be expressed in analogy to (4.74), averaged over one rotational period,
(4.78a)
(4.78b)
where
and (cf. Fig. 4.21)
(4.79)
 (4.79)
(4.79)
The angle of attack is still given by (4.64), with the pitch angle θ being the angle between the y-axis and the blade center chord line (cf. Fig. 4.16c).
The force components (4.78) may be transformed to the fixed (x0, y0, z0) co-ordinate system, yielding
(4.80)
with the other components Fy0 and Fz0 being neglected due to the assumptions made. Using the auxiliary relations given, a may be determined by equating the two expressions (4.77) and (4.80) for Fx0.
After integration over dh and dψ, the total torque Q and power coefficient Cp can be calculated. Figure 4.32 gives an example of the calculated Cp for a low-solidity, two-bladed Darrieus rotor with NACA 0012 blade profiles and a size corresponding to Reynolds number Re=3 × 106. The curve is similar to the ones obtained for propeller-type rotors (e.g., Fig. 4.17), but the maximum Cp is slightly lower. The reasons why this type of cross-wind converter cannot reach the maximum Cp of 16/27 derived from (4.55) (the “Betz limit”) are associated with the fact that the blade orientation cannot remain optimal for all rotational angles ψi, as discussed (in terms of a simplified solution to the model presented above) by Lissaman (1976).

Figure 4.33 gives the torque as a function of angular velocity Ω for a small three-bladed Darrieus rotor. When compared with the corresponding curves for propeller-type rotors shown in Fig. 4.22a and b (or generally Fig. 4.21), it is evident that the torque at Ω=0 is zero for the Darrieus rotor, implying that it is not self-starting. For application with an electric grid or some other back-up system, this is no problem, since the auxiliary power needed to start the Darrieus rotor at the appropriate times is very small compared with the wind converter output, on a yearly average basis. However, for application as an isolated source of power (e.g., in rural areas), it is a disadvantage, and it has been suggested that a small Savonius rotor should be placed on the main rotor axis in order to provide the starting torque (Banas and Sullivan, 1975).

Another feature of the Darrieus converter (as well as of some propeller-type converters), which is evident from Fig. 4.33, is that for application with a load of constant Ω (as in Fig. 4.22a), there will be a self-regulating effect, in that the torque will rise with increasing wind speed only up to a certain wind speed. If the wind speed increases further, the torque will begin to decrease. For variable-Ω types of load (as in Fig. 4.22b), the behavior of the curves in Fig. 4.33 implies that cases of irregular increase and decrease of torque, with increasing wind speed, can be expected.
4.3.3.2 Multiple rotor configurations
Placing more than one rotor on the same tower is an old idea, first forwarded by Juul (1964), arguing that two rotors placed at different positions vertically could cater to both lower and higher wind speeds. In 2016, the company Vestas is testing a prototype 4-rotor design (in a square configuration of two horizontally by two vertically), suggesting that for onshore applications this might be less expensive per unit of energy produced than using one large rotor. Again the output of the bottom rotors will, due to obstacles to wind flow (roughness, buildings, forests, fences and so on), be low, but perhaps gaining more operating hours over the year, if the blades are suitable designed (Anonymous, 2016b).
4.3.3.3 Augmenters and other “advanced” converters
In the preceding sections, it has been assumed that the induced velocities in the converter region were half of those in the wake. This is strictly true for situations where all cross-wind induced velocities (ut and ur) can be neglected, as shown in (4.50), but if suitable cross-wind velocities can be induced so that the total streamwise velocity in the converter region, ux, exceeds the value of −1/2(ux,in + ux,out) by a positive amount δuxind, then the Betz limit on the power coefficient, Cp=16/27, may be exceeded,
A condition for this to occur is that the extra induced streamwise velocity δ uxind does not contribute to the induced velocity in the distant wake, uxind, which is given implicitly by the above form of ux, since
The streamtube flow at the converter, (4.49), is then
(4.81)
with ![]() and the power (4.53) and power coefficient (4.55) are replaced by
and the power (4.53) and power coefficient (4.55) are replaced by
(4.82)
 (4.82)
(4.82)
where the streamtube area As equals the total converter area A, if the single-streamtube model is used.
4.3.4 Ducted rotor
In order to create a positive increment aux,in of axial velocity in the converter region, one may try to take advantage of the possibility of inducing a particular type of cross-wind velocity, which causes the streamtube area to contract in the converter region. If the streamtube cross-section is circular, this may be achieved by an induced radial outward force acting on the air, which again can be caused by the lift force of a wing section placed at the periphery of the circular converter area, as illustrated in Fig. 4.34.

Figure 4.34 compares a free propeller-type rotor (top), for which the streamtube area is nearly constant (as was actually assumed in section 4.3.2 and also for the Darrieus rotor) or expanding because of radially induced velocities, with a propeller rotor of the same dimensions, shrouded by a duct-shaped wing-profile. In this case the radial inward lift force FL on the shroud corresponds (by momentum conservation) to a radial outward force on the air, which causes the streamtube to expand on both sides of the shrouded propeller; in other words, it causes the streamlines passing through the duct to define a streamtube, which contracts from an initial cross-section to reach a minimum area within the duct and which again expands in the wake of the converter. From (4.59), the magnitude of the lift force is
with the duct chord cduct defined in Fig. 4.34 and Wduct related to the incoming wind speed ux,in by an axial interference factor aduct for the duct, in analogy with the corresponding one for the rotor itself, (4.52),
![]() is associated with a circulation Γ around the shroud profile (shown in Fig. 4.34), given by (4.57). The induced velocity δuxind inside the duct appears in the velocity being integrated over in the circulation integral (4.57), and to a first approximation it may be assumed that the average induced velocity is simply proportional to the circulation (which in itself does not depend on the actual choice of the closed path around the profile),
is associated with a circulation Γ around the shroud profile (shown in Fig. 4.34), given by (4.57). The induced velocity δuxind inside the duct appears in the velocity being integrated over in the circulation integral (4.57), and to a first approximation it may be assumed that the average induced velocity is simply proportional to the circulation (which in itself does not depend on the actual choice of the closed path around the profile),
(4.83)
where the radius of the duct, R (assumed to be similar to that of the inside propeller-type rotor), has been introduced because the path-length in the integral Γduct is proportional to R and the factor kduct appearing in (4.83) is therefore reasonably independent of R. Writing Γduct=(δ Wduct)−1 ![]() in analogy to (4.57), and introducing the relations found above,
in analogy to (4.57), and introducing the relations found above,
(4.84)
If the length of the duct, cduct, is made comparable to or larger than R, and the other factors in (4.84) can be kept near to unity, it is seen from (4.82) that a power coefficient about unity or larger is possible. This advantage may, however, be outweighed by the much larger amounts of materials needed to build a ducted converter, relative to a free rotor.
Augmenters taking advantage of the lift forces on a suitably situated aerodynamic profile need not provide a fully surrounding duct around the simple rotor device. A vertical cylindrical tower structure (e.g., with a wing profile similar to that of the shroud in Fig. 4.34) may suffice to produce a reduction in the widths of the streamtubes relevant to an adjacently located rotor and thus may produce some enhancement of power extraction.
4.3.5 Rotor with tip-vanes
A formally appealing design, shown in Fig. 4.35, places tip-vanes of modest dimensions on the rotor blade tips (Holten, 1976). The idea is that the tip-vanes act like a duct, without causing much increase in the amount of materials needed in construction. The smaller areas producing lift forces are compensated for by having much larger values of the apparent velocity Wvane seen by the vanes than Wduct in the shroud case. This possibility occurs because the tip-vanes rotate with the wings of the rotor (in contrast to the duct), and hence experience air with an apparent cross-wind velocity given by

The magnitude of the ratio Wvane/Wduct is thus of the order of the tip-speed ratio λ=RΩ/ux,in, which may be 10 or higher (cf. section 4.3.2).
The lift force on a particular vane is given by ![]() and the average inward force over the periphery is obtained by multiplying this expression by (2πR)−1 Bbvane, where B is the number of blades (vanes), and where bvane is the length of the vanes (see Fig. 4.35).
and the average inward force over the periphery is obtained by multiplying this expression by (2πR)−1 Bbvane, where B is the number of blades (vanes), and where bvane is the length of the vanes (see Fig. 4.35).
Using a linearized expression analogous to (4.83) for the axial velocity induced by the radial forces,
(4.85)
the additional interference factor ![]() to use in (4.82) may be calculated. Here Γ is the total circulation around the length of the tip-vanes (cf. Fig. 4.35), and not the circulation Γvane=(ρ Wvane)−1 FLvane in the plane of the vane lift and drag forces (left-hand side of Fig. 4.35). Therefore, Γ may be written
to use in (4.82) may be calculated. Here Γ is the total circulation around the length of the tip-vanes (cf. Fig. 4.35), and not the circulation Γvane=(ρ Wvane)−1 FLvane in the plane of the vane lift and drag forces (left-hand side of Fig. 4.35). Therefore, Γ may be written
i.e., it is equal to the average inward force divided by ρ times the average axial velocity at the tip-vane containing peripheral annulus,
Expressions for a″ have been derived by Holten (1976). By inserting the above expressions into (4.85), ![]() is obtained in the form
is obtained in the form
(4.86)
The part (Bcvanebvane/πR2) in the above expression is the ratio between the summed tip-vane area and the rotor-swept area. Taking this as 0.05 and [according to Holten (1976), for bvane/R=0.5] kvane (1−avane)2/(1 + a″) as 0.7, the tip-speed ratio λ as 10, and ![]() the resulting a is 1.31 and the power coefficient according to the condition that maximizes (4.82) as function of a,
the resulting a is 1.31 and the power coefficient according to the condition that maximizes (4.82) as function of a,
The drag forces ![]() induced by the tip-vanes (cf. Fig. 4.35) represent a power loss from the converter that has not been incorporated in the above treatment. According to Holten (1976), in the numerical example studied above, this loss may reduce Cp to about 1.2. This is still twice the Betz limit for a tip-vane area that would equal the area of the propeller blades for a three-bladed rotor with average chord ratio c/R=0.05. It is conceivable that the use of such tip-vanes to increase the power output would in some cases be preferable to achieving the same power increase by increasing the rotor dimensions.
induced by the tip-vanes (cf. Fig. 4.35) represent a power loss from the converter that has not been incorporated in the above treatment. According to Holten (1976), in the numerical example studied above, this loss may reduce Cp to about 1.2. This is still twice the Betz limit for a tip-vane area that would equal the area of the propeller blades for a three-bladed rotor with average chord ratio c/R=0.05. It is conceivable that the use of such tip-vanes to increase the power output would in some cases be preferable to achieving the same power increase by increasing the rotor dimensions.
4.3.6 Other concepts
A large number of alternative devices for utilization of wind energy have been studied, in addition to those already discussed. The lift-producing profile exposed to the wind may be hollow, with holes through which inside air is driven out by the lift forces. Through a hollow tower structure, replacement air is then drawn to the wing profiles from sets of openings placed so that the air must pass one or more turbine propellers in order to reach the wings. The turbine propellers provide the power output, but the overall efficiency, based on the total dimensions of the device, is low (Hewson, 1975). The efficiency of devices that try to concentrate the wind energy before letting it reach a modest-size propeller may be improved by first converting the mainly axial flow of the wind into a flow with a large vorticity of a simple structure, such as a circular air motion. Such vortices are, for example, formed over the sharp edges of highly swept delta wings, as illustrated in Fig. 4.36a (Sforza, 1976). There are two positions along the baseline of the delta wing where propeller rotors can be placed in an environment with streamwise velocities us/uin of 2–3 and tangential velocities ut of the same order of magnitude as uin (Sforza, 1976).

If the wake streamlines can be diffused over a large region, so that interaction with the wind field not contributing to the streamtubes passing through the converter can transfer energy to the slipstream motion and thereby increase the mass flow Jm through the converter, then further increase in power extraction can be expected. This is the case for the ducted system shown in Fig. 4.34 (lower part), but it may be combined with the vorticity concept described above to form a device of the general layout shown in Fig. 4.36b (Yen, 1976). Wind enters the vertical cylinder through a vertical slit and is forced to rotate by the inside cylinder walls. The vortex system created this way (an “artificial tornado”) is pushed up through the cylinder by pressure forces and leaves by the open cylinder top. Owing to the strong vorticity, the rotating air may retain its identity high up in the atmosphere, where its diffusion extracts energy from the strong winds expected at that height. This energy is supposed to be transferred down the “tornado,” strengthening its vorticity and thus providing more power for the turbines placed between the “tornado” bottom and a number of air inlets at the tower foot, which replace air that has left the top of the cylinder (cf. Fig. 4.36b). Neither of these two constructions has found practical applications.
Although wind speeds are usually low in built-up areas such as cities, high winds can be found in the upper parts of high-rise buildings. Quite many ideas of integrating wind-harvesting devices into such buildings have been suggested and some of them actually built (see survey by Haase and Löfström, 2015). These typically use several horizontal or vertical axis wind turbines. The main problem is vibrations induced in the building. Less conventional ideas involve creating charged particle and having the wind transport them from one electrode to another (wind walls, fences, and piezoelectric fences). Here the problem is that (due to the low conductivity of air) the charged particles (aerosols) have to be produced at the surface of an electrode and teared off or sprayed out to join the wind motion (Marks, 1982, 1984). This is an intricate process usually of low efficiency, and it requires energy that would reduce the net power produced.
Conventional (or unconventional) wind energy converters may as mentioned be placed on floating structures at sea (if this is judged less expensive than providing a sea-bed foundation structure), or may be mounted on balloons (e.g., a pair of counter-rotating propellers beside one another) in order to utilize the increasing wind speed usually found at elevations not accessible to ordinary structures placed on the ground. In order to serve as a power source, the balloons must be guyed to a fixed point on the ground, with power transmission wires of sufficient strength.
4.3.6.1 Heat, electrical/mechanical power, and fuel generation
The wind energy converters described in the preceding sections primarily convert the power in the wind into rotating shaft power. The conversion system generally includes a further conversion step if the desired energy form is different from that of the rotating shaft.
Examples of this are electric generators with fixed or variable rotational velocity, mentioned in connection with Fig. 4.22a and b. The other types of energy can, in most cases, be obtained by secondary conversion of electric power. In some such cases, the “quality” of electricity need not be as high as that usually maintained by utility grid systems, in respect to voltage fluctuations and variations in frequency in the (most widespread) case of alternating current (AC). For wind energy converters aimed at constant working angular velocity Ω, it is customary to use a gearbox and an induction-type generator. This maintains an AC frequency equal to that of the grid and constant to within about 1%. Alternatively, the correct frequency can be prescribed electronically. In both cases, reactive power is created (i.e., power that, like that of a condenser or coil, is phase shifted), which may be an advantage or disadvantage, depending on the loads on the grid.
For variable-frequency wind energy converters, the electric output would be from a synchronous generator and in the form of variable-frequency AC. This would have to be subjected to a time-dependent frequency conversion, and for arrays of wind turbines, phase mismatch would have to be avoided. Several schemes exist for achieving this, for example, semiconductor rectifying devices (thyristors), which first convert the variable frequency AC to DC (direct current) and then, in a second step, the DC to AC of the required fixed frequency.
If the desired energy form is heat, “low-quality” electricity may first be produced, and the heat may then be generated by leading the current through a high ohmic resistance. Better efficiency can be achieved if the electricity can be used to drive the compressor of a heat pump (see section 4.2.3), taking the required heat from a reservoir of temperature lower than the desired one. It is also possible to convert the shaft power more directly into heat. For example, the shaft power may drive a pump, pumping a viscous fluid through a nozzle, so that the pressure energy is converted into heat. Alternatively, the shaft rotation may be used to drive a “paddle” through a fluid, in such a way that large drag forces arise and the fluid is put into turbulent motion, gradually dissipating the kinetic energy into heat. If water is used as the fluid medium, the arrangement is called a water-brake.
Windmill shaft power has traditionally been used to perform mechanical work of various kinds, including flour milling, threshing, lifting, and pumping. Pumping of water (e.g., for irrigation purposes), with a pump connected to the rotating shaft, may be particularly suitable as an application of wind energy, since variable and intermittent power would, in most cases, be acceptable, as long as the average power supply, in the form of lifted water over an extended period of time, is sufficient.
In other cases, an auxiliary source of power may be needed, so that demand can be met at any time. For grid-based systems, this can be achieved by trade of energy (cf. scenarios described in Chapter 6). Demand matching can also be ensured if an energy storage facility of sufficient capacity is attached to the wind energy conversion system. A number of such storage facilities are mentioned in Chapter 5, and among them is the storage of energy in the form of fuels, such as hydrogen. Hydrogen may be produced, along with oxygen, by electrolysis of water, using electricity from the wind energy converter. The detailed working of these mechanisms over time and space is simulated in the scenarios outlined in Chapter 6 and related studies (Sørensen et al., 2004; Sørensen, 2015).
The primary interest may also be oxygen, for example, to be dissolved into the water of lakes that are deficient in oxygen (say, as a result of pollution), or to be used in connection with “ocean farming,” where oxygen may be a limiting factor if nutrients are supplied in large quantities, e.g., by artificial upwelling. The oxygen may be supplied by wind energy converters with reverse-mode fuel cells, while the co-produced hydrogen may be used to produce or move the nutrients. Again, in this type of application, large power fluctuations may be acceptable.
4.3.7 Hydro and tidal energy conversion
Electricity generation from water possessing potential, kinetic, or pressure energy (4.39)–(4.41) can be achieved by means of a turbine, the general theory of which is outlined in section 4.3.1. The design of the particular turbine to be used depends on whether there is a flow Jm through the device, which must be kept constant for continuity reasons, or whether it is possible to obtain zero fluid velocity after passage through the turbine.
The energy at the entrance of the turbine may be kinetic or pressure energy, causing the forces on the turbine blades to be a combination of “impulse” and “reaction” forces, which can be modified easily. If elevated water is allowed to “fall,” its potential energy forms kinetic energy, or it may act as a pressure source through a water-filled tube connecting the elevated water source with the turbine placed below. Conversely, pressure energy may be transformed into kinetic energy by passage through a nozzle.
Typical classical turbine designs are illustrated in Fig. 4.37. For high specific-energy differences win−wout (large heads), the Pelton turbine, which is a high-speed variant of the simple undershot waterwheel, may be used. It has inflow through a nozzle, providing purely kinetic energy, and negligible wout (if the reference point for potential energy is taken to correspond to the water level after passing the turbine). In addition, the Francis turbine (Fig. 4.37b) is used with large water heads. Here the water is allowed to approach the entire rotor and is guided to obtain optimal angles of attack; the rotor moves owing to the reaction forces resulting from both the excess pressure at the entrance and the suction at the exit.

A third type of turbine, illustrated in Fig. 4.37c, can be used for low water heads. Here the rotor is a propeller, designed to obtain high angular speeds. Again, the angle of attack may be optimized by installation of guiding blades at the entrance to the rotor region. If the blade pitch angle is fixed, it is called a Nagler turbine. If it can be varied, it is called a Kaplan turbine.
Figure 4.38 gives examples of actual efficiencies for the types of turbines described above (Fabritz, 1954) as functions of the power level. The design point for these turbines is about 90% of the rated power (which is set to 100% on the figure), so the power levels below this point correspond to situations in which the water head is insufficient to provide the design power level.

Pelton and Francis turbines have been used in connection with river flows with rapid descent, including waterfalls, and, in many cases, construction of dams has provided a steady energy source throughout most of the year. The water is stored at an elevated level in natural or artificial reservoirs and is allowed to descend to the turbines only when needed. An example of natural variations inviting regulation is shown in Fig. 3.50. The operation of systems that include several sources of flow (springs, glacier or snow melt, rainy regions), several reservoirs of given capacity, a given number of turbine power stations, and a load of electricity usage that also varies with time, has been studied and optimized by simulation techniques (see, for example, Jamshidi and Mohseni, 1976).
For many years, hydropower has been the most widely used renewable source of electricity and also—among all types of power plants, including fossil and nuclear—the technology involving the largest power plants (rated at several gigawatts) and often associated with gigantic artificial water reservoirs. The earlier development of such schemes with disregard of social and environmental problems has given hydropower a negative reputation. In developing countries, thousands of people have been forcefully removed from their homes, with no compensation, to make room for flooded reservoirs that cause monumental environmental disruption (although this practice is not restricted to developing countries, as the examples of Tasmania and Norway show), and in some cases destroying priceless archeological sites (e.g., Turkey). Current activity has shifted from South America to China, where several very large hydro projects have given rise to debate (Yonghui et al., 2011). In recent decades, it has become clear that, in many cases, the environmental damage can be minimized, albeit at a higher cost. The discussion in section 3.4.2 mentions Swiss efforts to use cascading systems in order to do away with large reservoirs, accepting smaller reservoirs located along the flow of water and designed to minimize local impacts, despite somewhat less latitude for regulation. A worldwide survey of such efforts can be found in Truffer et al. (2011). Today, in most societies, full consideration of these concerns has fortunately become a prerequisite for considering hydropower a benign energy source.
Kaplan (or Nagler) turbines are used in connection with low water heads (e.g., the local community power plants in China; cf. Anonymous, 1975) and tidal plants (André, 1976), and they may be used if ocean currents are to be exploited. A survey of tidal energy installations and projects can be found in O’Rourke et al., (2011). The early 240-MW tidal power plant at la Rance in France has turbines placed in a dam structure across an inlet, which serves as a reservoir for two-way operation of the turbines (filling and emptying of the reservoir). According to André (1976), the turbine efficiency is over 90%, but the turbines are only generating electricity during part of the day, according to the scheme outlined in Fig. 4.39. The times at which generation is possible are determined by the tidal cycle, according to the simple scheme of operation, but modifications to better suit load variations are possible, e.g., by using the turbines to pump water into the reservoir at times when filling would not occur as a result of the tidal cycle itself. The installation has had several problems with siltation, causing it to be operated most of the time only for water flows in one direction, despite its design to accept water inflow from both sides. Another account of environmental performance has been made for a Russian tidal plant (Usachev and Marfenin, 2011).

4.3.8 Magneto-hydrodynamic converters
For the turbines considered above, it is explicitly assumed that no heat was added. Other flow-type converters are designed to receive heat during the process. An example of this is the gas turbine, which is described in section 4.1.2 from the point of view of thermodynamics. The gas turbine (Brayton cycle) allows the conversion of heat into shaft power, but it may equally well be viewed as the successive conversion of heat into kinetic energy of flow and of the kinetic energy of flow into shaft power.
The magneto-hydrodynamic converter is another device converting heat into work, but delivering the work directly as electrical power without intermediate steps of mechanical shaft power. The advantage is not in avoiding the shaft power to electrical power conversion, which can be done with small losses, but rather in avoiding a construction with moving parts, thereby permitting higher working temperatures and higher efficiency. The heat added is used to ionize a gas, and this conducting gas (“plasma”) is allowed to move through an expanding duct, upon which an external magnetic field B is acting. The motion of the gas is sustained by a pressure drop between the chamber where heat is added and the open end of the expanding duct. The charged particles of velocity u in the plasma are subjected to a Lorentz force
(4.87)
where the direction of this induced force is perpendicular to B and u, but opposite for the positive atoms and for the negatively charged electrons. Since the mass of an electron is much smaller than that of an atom, the net induced current will be in the direction given by a negative value of ρel. Assuming a linear relationship between the induced current Jind and the induced electric field Eind=F/ρel=u×B, the induced current may be written
(4.88)
where σ is the electrical conductivity of the plasma. This outlines the mechanism by which the magneto-hydrodynamic (MHD) generator converts kinetic energy of moving charges into electrical power associated with the induced current Jind across the turbine. A more detailed treatment must take into account the contributions to the force (4.87) on the charges, which arise from the induced velocity component Jind/ρel, as well as the effect of variations (if any) in the flow velocity u through the generator stage (see, for example, Angrist, 1976).
The generator part of the MHD generator has an efficiency determined by the net power output after subtraction of the power needed for maintaining the magnetic field B. Only the gross power output can be considered as given by (4.12). Material considerations require that the turbine be cooled, so in addition to power output, there is a heat output in the form of a coolant flow, as well as the outgoing flow of cooled gas. The temperature of the outflowing gas is still high (otherwise recombination of ions would inhibit the functioning of the converter), and the MHD stage is envisaged as being followed by one or more conventional turbine stages. It is believed that the total power generation in all stages could be made to exceed that of a conversion system based entirely on turbines with moving parts, for the same heat input.
Very high temperatures are required for the ionization to be accomplished thermally. The ionization process can be enhanced in various ways. One is to “seed” the gas with suitable metal dust (sodium, potassium, cesium, etc.), for which case working MHD machines operating at temperatures around 2500 K have been demonstrated (Hammond et al., 1973). If the heat source is fossil fuel, and particularly if it is coal with high sulfur content, the seeding has the advantage of removing practically all the sulfur from the exhaust gases (the seeding metals are rather easily retrieved and must anyway be recycled for economic reasons).
4.3.9 Wave energy conversion
A large number of devices for converting wave energy to shaft power or compression energy have been suggested, and a few of them have been tested on a modest scale. Reviews of wave devices may be found, for example, in Leichman and Scobie (1975), Isaacs et al. (1976), Slotta (1976), Clarke (1981), Sørensen (1999), Thorpe (2001), CRES (2002), DEA Wave Program (2002), Scruggs and Jacob (2009), Tollefson (2014) and Wang (2017). An overview of possibilities is illustrated schematically in Fig. 4.40. None of the projects have reached viability yet, either for technical or for economic reasons. Below, the technical details are given for two typical examples of actual devices: the oscillating water column device that has been in successful small-scale operation for many years in powering mid-sea buoys, and one of the earliest suggestions, the Salter duck, which theoretically has a very high efficiency, but has not been successful in actual prototyping experiments. However, first a few general remarks:

The resource evaluation in section 3.3.4 indicated that the most promising locations for a wave-utilization apparatus would be in the open ocean, rather than in coastal or shallow water regions. Yet all three device types have been researched: (a) shore-fixated devices for concentrating waves into a modestly elevated reservoir, from which the water may drive conventional hydro-turbines; (b) near-shore devices making use of the oscillations of a water column or a float on top of the waves, relative to a structure standing at the sea floor; and (c) floating devices capturing energy by differential movements of different parts of the device.
As a first orientation toward the prospects of developing economically viable wave-power devices, a comparison with (e.g., offshore) wind power may be instructive. One may first look at the weight of the construction relative to its rated power. For an onshore wind turbine, this number is around 0.1 kg/Wrated, while adding the extra foundation weight for offshore turbines (except caisson in-fill) increases the number to just below 0.2 kg/Wrated. For 15 wave-power devices studied by the DEA Wave Program (2002), the range of weight to rated power ratios is from 0.4 to 15 kg/Wrated. The two numbers below 1.0 are for device concepts not tested and for use on shore or at low water depth, where the power resources are small anyway. Therefore, the conclusion is that the weight/power ratio is likely to be at least twice, but likely more than five times, that of offshore wind turbines, which to a first approximation is also a statement on the relative cost of the two concepts.
Using the same data, one may instead look at the ratio of actually produced power at a particular location and the weight of the device. For offshore wind in the North Sea, this is around 20 kWh y−1 kg−1. For the 15 wave devices, values of 0.1 to 10 are found, by using for all devices the same wave data estimated for a location some 150 km west of the city of Esbjerg in Denmark.* Clearly, it is not reasonable to use data for a location 150 km out into the ocean for wave-power devices that must stand on the shore or at very shallow water. Omitting these cases, the resulting range reduces to 0.1–1.5 kWh y−1 kg−1, or over 13 times less than for offshore wind in the same region. Again, the simplistic translation from weight to cost indicates that wave energy is economically unattractive, because at the same location wind power can be extracted at much lower cost. In addition, there are no particular reasons to expect the distribution of weight on less expensive materials (concrete or steel) and more expensive materials (special mechanical and electric equipment) to be substantially different. It is also argued that, where wave power would be feasible, offshore wind power is also available, because it is the wind that creates the waves. Only at large water depths, say, over 20 m, where foundation would be problematic, might the wave devices floating on the surface be more attractive than wind. Yet, there are no indications above that the cost of such mid-ocean wave-power extraction and cable transmission to land will be economically viable, unless all near-shore wind options have already been exploited.
Finally, one must consider the time-distribution of the power from wave devices. As seen from Figs. 3.56 and 3.59, wave power exhibits large variations with seasons. For example, in the North Sea, variations are large: Rambøll (1999) finds 6 times more average wave power in January than in June, where the corresponding factor for wind power is 2 (Sørensen, 2000a). Acceptance of wave power into grids serving electricity demands is thus going to be considerably more difficult than acceptance of wind, which roughly has the same seasonal variation as demand, at least on the Northern Hemisphere. Thus, in addition to an initial cost likely to be substantially higher than that of wind power, additional costs for energy storage or other supply–demand mismatch management must be considered.
4.3.9.1 Pneumatic converter
The only wave energy conversion device that has been in considerable practical use, although on a fairly small scale, is the buoy of Masuda (1971), shown in schematic form in Fig. 4.41. Several similar wave-power devices exist, based on an oscillating water column driving an air turbine; in some cases, they are shore-based and have only one chamber (see, for example, CRES, 2002). The buoy in Fig. 4.41 contains a tube extending downward, into which water can enter from the bottom, and a “double-action” air turbine, i.e., a turbine that turns the same way under the influence of both pressure and suction (as illustrated by the non-return valves).

Wave motion will cause the whole buoy to move up and down and thereby create an up-and-down motion of the water level in the center tube, which in turn produces the pressure increases and decreases that make the turbine in the upper air chamber rotate. Special nozzles may be added to increase the speed of the air impinging on the turbine blades.
For a simple sinusoidal wave motion, as described in section 2.5.3, but omitting the viscosity-dependent exponential factor, the variables σ1 and Z, describing the water level in the center tube and the vertical displacement of the entire buoy, respectively, may also be expected to vary sinusoidally, but with phase delays and different amplitudes,

with ω=kUw in terms of the wave number k and phase velocity Uw (cf. section 2.5.3). The relative air displacement ρ1 in the upper part of the center tube (the area of which is ![]() ) is now (see Fig. 4.41)
) is now (see Fig. 4.41)
Assuming the airflow incompressible, continuity requires that the relative air velocity dρ2/dt in the upper tubes forming the air chamber (of area ![]() ) be
) be
It is now possible to set up the equations of motion for σ1 and Z, equating the accelerations d2σ1/dt2 and d2Z/dt2 multiplied by the appropriate masses (of the water column in the center tube and of the entire device) to the sum of forces acting on the mass in question. These are buoyancy and pressure forces, as well as friction forces. The air displacement variable ρ2 satisfies a similar equation involving the turbine blade reaction forces. The equations are coupled, but some of the mutual interaction can be incorporated as damping terms in each equation of motion. McCormick (1976) uses linear damping terms −b(dσ1/dt), etc., with empirically chosen damping constants, and drops other coupling terms, so that the determination of σ1 and Z becomes independent. Yet the dρ2/dt values determined from such solutions are in good agreement with measured ones, for small wave amplitudes a (or significant heights HS=2×21/2a; cf. section 3.3.3) and wave periods T=2π/ω, which are rather close to the resonant values of the entire buoy, T0, or to that of the center tube water column, T1. Between these resonant periods, the agreement is less good, probably indicating that couplings are stronger between the resonances than near them, as might be expected.
The power transferred to the turbine shaft cannot be calculated from expression (4.12) because the flow is not steady. The mass flows into and out of the converter vary with time, and at a given time, they are not equal. However, owing to the assumption that air is incompressible, there will be no buildup of compressed air energy storage inside the air chamber, and therefore, power can still be obtained as a product of a mass flux, i.e., that to the turbine,
(ρa being the density of air), and a specific energy change Δw (neglecting heat dissipation). In addition to the terms (4.39)–(4.41) describing potential energy changes (unimportant for the air chamber), kinetic energy changes, and pressure/enthalpy changes, Δw will contain a term depending on the time variation of the air velocity dρ2/dt at the turbine entrance,

where ΔP is the difference between the air pressure in the air chamber (and upper center tube, since these are assumed equal) and in the free outside air, and ρ is the co-ordinate along a streamline through the air chamber (McCormick, 1976). Internal losses in the turbine have not been taken into account.
Figure 4.42 shows an example of the simple efficiency of conversion, η, given by the ratio of JmΔw and the power in the incident waves, which for sinusoidal waves is given by (3.28). Since expression (3.28) is the power per unit length (perpendicular to the direction of propagation, i.e., power integrated over depth z), it should be multiplied by a dimension of the device that characterizes the width of wave acceptance. As the entire buoy is set into vertical motion by the action of the waves, it is natural to take the overall diameter 2R0 (cf. Fig. 4.41) as this parameter, such that
(4.89)

Efficiency curves as functions of the period T, for selected significant wave heights HS, which are shown in Fig. 4.42, are based on a calculation by McCormick (1976) for a 3650 kg buoy with overall diameter 2R0=2.44 m and center tube diameter 2R1=0.61 m. For fixed HS, η has two maxima, one just below the resonant period of the entire buoy in the absence of damping terms, T0 ≈ 3 s, and one near the air chamber resonant period, T1≈5 s. This implies that the device may have to be “tuned” to the periods in the wave spectra giving the largest power contributions (cf. Fig. 3.56), and that the efficiency will be poor in certain other intervals of T. According to the calculation based on solving the equations outlined above and with the assumptions made, the efficiency η becomes directly proportional to HS. This can only be true for small amplitudes, and Fig. 4.42 shows that unit efficiency would be obtained for HS ≈ 1.2 m from this model, implying that non-linear terms have to be kept in the model if the power obtained for waves of such heights is to be correctly calculated. McCormick (1976) also refers to experiments that suggest that the power actually obtained is smaller than that calculated.
Masuda has proposed placing a ring of pneumatic converters (floating on water of modest depth) such that the diameter of the ring is larger than the wavelength of the waves of interest. He claims that the transmission of wave power through such a ring barrier is small, indicating that most of the wave energy will be trapped (e.g., multiply reflected on the interior barriers of the ring) and thus eventually will be absorbed by the buoy and internal fluid motion in the center tubes. In other developments of this concept, the converters are moored to the sea floor or leaning toward a cliff on the shore (Clarke, 1981; Vindeløv, 1994; Thorpe, 2001).
4.3.9.2 Oscillating-vane converter
Since water particles in a sinusoidal wave are moving in circular orbits, it may be expected that complete absorption of the wave energy is only possible with a device possessing two degrees of freedom, i.e., one allowing displacement in both vertical and horizontal directions. Indeed, it has been shown by Ogilvie (1963) that an immersed cylinder of a suitable radius, moving in a circular orbit around a fixed axis (parallel to its own axis) with a certain frequency, is capable of completely absorbing the energy of a wave incident perpendicular to the cylinder axis, i.e., with zero transmission and no wave motion “behind” the cylinder.
Complete absorption is equivalent to energy conversion at 100% efficiency, and Evans (1976) has shown that this is also possible for a half-immersed cylinder performing forced oscillations in two dimensions, around an equilibrium position, whereas the maximum efficiency is 50% for a device that is only capable of performing oscillations in one dimension.
The system may be described in terms of coupled equations of motion for the displacement co-ordinates Xi (i=1, 2),
where m is the mass of the device, di is the damping coefficient in the ith direction, ki correspondingly is the restoring force or “spring constant” (the vertical component of which may include the buoyancy forces), and Fij is a matrix representing the complete hydrodynamic force on the body. It depends on the incident wave field and on the time derivatives of the co-ordinates Xi, the non-diagonal terms representing couplings of the motion in vertical and horizontal directions.
The average power absorbed over a wave period T is
(4.90)
and the simple efficiency η is obtained by inserting each of the force components in (4.90) as forces per unit length of cylinder, and dividing by the power in the waves (3.28). One may regard the following as design parameters: the damping parameters di, which depend on the power extraction system, the spring constants ki and the mass distribution inside the cylinder, which determine the moments and hence influence the forces Fij. There is one value of each di for a given radius R of the cylinder and a given wave period that must be chosen as a necessary condition for obtaining maximum efficiency. A second condition involves ki, and if both can be fulfilled, the device is said to be tuned. In this case, it will be able to reach maximum efficiency (0.5 or 1, for oscillations in one or two dimensions). Generally, the second condition can be fulfilled only in a certain interval of the ratio R/λ between the radius of the device and the wavelength λ=gT2/(2π).
Figure 4.43 shows the efficiency as a function of 2πR/λ for a half-immersed cylinder tuned at 2πR/λ0=1 (full line) and for a partially tuned case, in which the choice of damping coefficient corresponds to tuning at 2π R/λ0=0.3, but where the second requirement is not fulfilled. Such partial tuning offers a possibility of widening the range of wave periods accepted by the device.

A system whose performance may approach the theoretical maximum for the cylinder with two degrees of freedom is the oscillating vane or cam of Salter (1974), illustrated in Fig. 4.44. Several structures of the cross-section indicated are supposed to be mounted on a common backbone providing the fixed axis around which the vanes can oscillate, with different vanes not necessarily moving in phase. The backbone has to be long in order to provide an approximate inertial frame, relative to which the oscillations can be utilized for power extraction, for example, by having the rocking motion create pressure pulses in a suitable fluid (contained in compression chambers between the backbone and oscillating structure). The necessity of such a backbone is also the weakness of the system, owing to the large bending forces along the structure, which must be accepted during storms.

The efficiency of wave power absorption for a Salter cam or duck of the type shown in Fig. 4.44 is indicated in Fig. 4.45, based on measurements on a model of modest scale (R=0.05 m). Actual devices for use in, say, a good wave energy location in the North Atlantic (cf. Fig. 3.56) would need a radius of 8 m or more if tuned at the same value of λ/(2πR) as the device used to construct Fig. 4.45 (Mollison et al., 1976). Electricity generators of high efficiency are available for converting the oscillating-vane motion (the angular amplitude of which may be of the order of half a radian) to electric power, either directly from the mechanical energy in the rocking motion or via the compression chambers mentioned above, from which the fluid may be let to an electricity-producing turbine. The pulsed compression is not incompatible with continuous power generation (Korn, 1972). Later experiments have shown that the structural strength needed for the backbone is a problem. For all wave devices contemplated, placed in favorable locations at mid-ocean, transmission to shore is a problem for the economy of the scheme (cf. discussion topics after Part III).

4.4 Solar radiation conversion
4.4.1 Photovoltaic conversion
To facilitate discussion of the physics of photovoltaic conversion devices, here follows a short primer on energy bands in semiconductors. It is not required for following the subsequent sections (photovoltaic devices, etc.).
The electrons in a solid move in a potential, which for crystalline forms is periodic, corresponding to the lattice structure of the material. The forces on a given electron are electromagnetic, comprising attractive interaction with the positively charged nuclei (the effective charge of which may be diminished by the screening effect of more tightly bound electrons) as well as repulsive interaction with other electrons. Owing to the small mass ratio between electrons and nuclei, the positions of the nuclei (Ri, i=1,2,3...) may to a first approximation be regarded as fixed. This is the basis for saying that the electrons are moving in a potential. When an electron is close to a definite nucleus, its wavefunction may be approximated by one of the atomic wavefunctions ψi,n(i) (r−Ri) for this isolated nucleus. One may therefore attempt to describe an arbitrary electron wavefunction as a linear combination of such atomic wavefunctions (orbitals),
(4.91)
Here N is the total number of atomic nuclei, and r is the position vector of the electron.
A simple example is a diatomic molecule (N=2) with only one important level in each atom,
for which two normalized solutions exist, with opposite relative sign between the two terms. If the overlap
(where the asterisk denotes complex conjugation) is non-zero, the energies of the two superposition states will be different from those (W1,n(1) and W2,n(2)) of the atomic wavefunctions ∫ψ1,n(1) and ψ2,n(2). The most tightly bound solution, ψb(r), will correspond to an energy lower than the lowest of the original ones W1,n(1) and W2,n(2), while the other solution, ψa(r), will correspond to an energy higher than the highest of the original ones (see, for example, Ballhausen and Gray, 1965).
If the energies Wb and Wa of the bonding solution ψb(r) and the antibonding solution ψa(r) are calculated for various relative positions R=|R1−R2|, one may obtain a picture like that shown in Fig. 4.46 (approximately describing an ionized hydrogen molecule H2+).

If the number of (say, identical) nuclei, N, is larger than two, but still placed in a regular geometrical relationship characterized by a single distance R (e.g., the distance between atomic nuclei in a cubic lattice or a diamond-type lattice), the superposition-type wavefunction (4.91) still gives an energy picture similar to Fig. 4.46, but now with N curves, the highest and lowest of which may look like the two curves for N=2.
For a solid crystal, N may be of the order of 1024, so the region between the lowest energy state and the highest one will be filled out with energy levels that for all practical purposes can be regarded as continuous. Such a region is called an energy band. For each pair of overlapping atomic orbits, n(1) and n(2), there will be a set of linear combinations of wavefunctions in the N=2 case, with bonding and antibonding characteristics. In the large-N case, each combination of overlapping atomic orbits will lead to an energy band, such that the overall picture of energy levels as a function of lattice characteristics (in the simple case, just R) will be one of a number energy bands inside which all electron energies are “allowed,” plus the spaces between energy bands in which no allowed energy is present. The energy band structure may, for example, resemble that shown in Fig. 4.47.

If the distance between the nuclei is large, an electron “feels” only one nucleus (plus a number of tightly bound “inner” electrons, if the nucleus has Z>2) at a time, and the energy spectrum is identical to that of an individual atom (right-hand side of Fig. 4.47). As the assumed distance between nuclei becomes smaller, energy bands develop and become wider. When the energy bands begin to overlap and cross (left-hand side of Fig. 4.47), the basis for the linear assumption (4.91) breaks down, at least in the form discussed so far. If the restriction that the bands are formed from one definite atomic orbital [so that there is no sum over n(i) in (4.91)] is relaxed, it still may be possible to use an expression of the form (4.91) to describe some features of the region of overlapping bands.
As an example, it is possible to obtain the two separate bands in silicon (see Fig. 4.47) by first defining two suitable superpositions of 3s and 3p atomic orbits [corresponding to the summation over n(i), this procedure being called hybridization in molecular theory], and then by applying the band theory [corresponding to the summation over i in (4.91)]. It is evident that, in this region near the band crossing point, it is possible to find energy gaps between adjacent bands that are much smaller than in the non-overlapping region.
The electron potentials initially represent a situation with one electron per atom being considered. The simplest approximation of many-electron states in one atom is to regard the electrons as independent of each other, except that they have to obey the Pauli exclusion principle, according to which there can be at most one electron in each quantum state. Because the electron has an intrinsic spin of S=1/2, there are two spin states (“spin-up” and “spin-down”) for each spatial orbit. Thus, the periodic system would be derived by first placing two electrons in the 1s-orbit (cf. Fig. 4.47), then two in the 2s-orbit, and then six in the 2p-orbit (comprising three degenerate spatial orbits, because the orbital angular momentum is L=1), etc.
A more accurate solution of the Schrödinger equation of quantum mechanics is necessary in order to include the effects of electron–electron interactions, which make the entire energy spectrum depend on electron number in addition to the smooth dependence on the charge of the nucleus (atomic number). In several cases, these interactions even influence the succession of orbits being filled in the periodic system.
Similar statements can be made for the energy bands in many-atom lattices. The spectrum of energy bands can be used to predict the filling systematics, as a function of the number of electrons per atom, but again the spectrum is not independent of the degree of filling (for this reason, no energy scale is provided in Fig. 4.47). Thus, a diagram like Fig. 4.47 cannot be used directly to predict the atomic distance (e.g., represented by the lattice constant) that will give the lowest total energy and hence the ground state of the system. This is in contrast to the H2+ molecule (Fig. 4.46), for which the minimum of the Wb curve determines the equilibrium distance between the nuclei.
Knowing the lattice structure and the lattice constant (the dimension of an elementary cube in the lattice), a vertical cut in a diagram of the type in Fig. 4.47 will give the allowed and forbidden energy values, with the reservations made above. Filling the proper number of electrons per atom into the energy bands, with reference to the Pauli principle, allows the energy of the latest added electron to be determined, as well as the lowest available energy level into which an additional electron added to the system may go.
If the electrons available exactly fill a band, and if there is a substantial distance to the next higher level, the material is an electrical insulator (no electrons can change state, i.e., they cannot “move”). If a band is partially filled, the material is a good conductor (e.g., a metal). The continuum of levels in the partially filled band allows the electrons to move throughout the lattice. If the distance between the highest filled band and an empty band is small, the material is called a semiconductor. At zero absolute temperature, a semiconductor is an insulator, but, because of the thermal energy spread at higher temperatures [given by (4.23) because electrons are Fermi particles], some electrons will be excited into the higher band (the conduction band). The conductance of silicon increases by a factor of 106 between 250 and 450 K.
The bands corresponding to 1s, 2s, and 2p atomic orbits are completely filled in Si, but then four electrons remain per atom. According to Fig. 4.47, the 3s and 3p bands are overlapping and allow two mixed bands to be constructed, with an intermediate gap of about 1 eV (1.6 × 10−5 J). The lower band (the valence band) can hold four electrons per atom, so this band will be completely full and the other one empty at zero temperature.
If a few of the atoms in a silicon lattice are replaced by an atom with higher Z (atomic number), e.g., phosphorus, the additional electrons associated with the impurity cannot be accommodated in the valence band, but will occupy a discrete level (the donor level) just below the conduction band (the energy depression being due to the larger attractive force from the atom of higher Z). A semiconductor material with this type of impurity is called n-type. The electrons in the donor-level are very easily excited into the conduction band. Adding n-type impurities makes the Fermi level [μi in (4.23)] move upward from the initial position approximately halfway between the valence and conduction bands.
Impurities with lower Z (e.g., Al in a Si-lattice) lead to electron vacancies or holes, which are associated with an energy slightly higher than the top of the valence band, again due to the Z-dependence of the attractive force. These acceptor levels easily transfer holes to the valence band, a process that may, of course, alternatively be described as the excitation of electrons from the valence band into the acceptor level. Semiconductor material with this type of impurity is called p-type. Holes can formally be treated as particles like electrons, but with positive charges and provided that the state of the pure semiconductor at zero temperature is taken as reference (“vacuum state” in quantum theory).
The energy diagrams of doped semiconductors of n- and p-types are sketched in Fig. 4.48. The distribution of electron densities on the energy bands in the valence and the conduction bands is indicated, for n- or p-doped and un-doped materials. For a more complete account of basic semiconductor theory, see, for example, Shockley (1950).