Chapter 5. Orbits
Defining Orbits
It’s helpful to know where your satellite is, other than saying “up there” or “in orbit.” For Earth-orbiting satellites, their path is a precise, repeating ellipse with one focus at the center of the Earth. An orbit is defined by six parameters, and if you know the value of those parameters, and the time, you can predict exactly where your satellite will be.
Those six parameters can be either the state vector, or the classic orbital elements. We call the position coordinates vector r (x,y,z) and the velocity coordinates vector v (vx, vy, vz). With r and v you have the instantaneous state of the object. So in three-dimensional space, six data points for our state vector (r,v) fully defines our satellite—for that one moment in time. If the satellite moves purely under the influence of gravity (no rocket firings allowed), you can also predict its future position.
Kepler worked out that orbits move in a geometric pattern called an ellipse. Newton later co-invented calculus to define why, but you don’t need to use that. You just need to know it’s a solvable problem. If you know the state vector (r,v) at some initial time, you can predict exactly where the satellite will be at any time in the future.
To solve this yourself, you can either take an orbital mechanics class or—as we recommend—you can use software. Orbit prediction codes are available freely on the Internet, and there are web apps that solve the calculation for you. The “Where Is the ISS?” links in Chapter 7, for example, use this kind of software to generate their prediction.
The state vector (r,v) is only one way to calculate an orbit. There are other sets of coordinates that can be used. One such set is the classic orbital elements, which define the orbit in terms that allow for easy prediction, and are the data shared using two-line element (TLE) data sets.
The Six Classic Orbital Elements
The six classic elements include terms that describe the shape of an orbit (semi-major axis a and eccentricity e), terms that define its position relative to the Earth’s equator and poles (inclination i and argument of perigee w), a term that ties the orbit to our calendar (longitude of the ascending node O), and a final item that says, for the defined orbit, how far along it is (usually mean anomaly, but also can be true anomaly or angle from last perigee passage or time from last perigee passage or time of periapsis passage).
-
a = semi-major axis = size
-
e = eccentricity = shape
-
i = inclination = tilt
-
ω = argument of perigee = twist
-
Ω = longitude of the ascending node = spin
-
v = mean anomaly = where in orbit
Shown here is “Orbit1” by Lasunncty (talk) (licensed under CC BY-SA 3.0 via Wikimedia Commons):

It is not so important that you understand the full meaning of these elements (you can read more online to learn that), but that you accept that these six elements fully define an orbit and its current position.
You can convert any state vector (r,v) to its equivalent orbital elements, and you can convert any orbital elements to a state vector. The state vector says, “Here is a direct line to the object, now,” and the orbital elements are a tool that lets you predict any future state vector. They work well together.
One neat property of the orbital elements is that an orbit’s period P (time to complete one full 360 lap) is proportional to its semi-major axis a (its size). p2 = k a3, where the constant k depends on the units used for a and p (and the mass of the object being orbited around; k is different for orbiting Jupiter versus orbiting the Earth, for example). This means that if you know a, you also know the period of the orbit—and vice versa.
TLEs
Orbital elements are often exchanged in NASA’s TLE format, covered in Book 1, DIY Satellite Platforms. Here is a short definition of the specification, excerpted from AMSAT.org, in part because AMSAT is the definitive source for amateur satellite work, and in part because a specification or definition is best quoted to avoid introducing errors. It is a primarily intended for computers rather than people, in that it has a fixed format and there are no labels in the actual data. From AMSAT.org, here is the format and the key for translating it:
1 AAAAAU YYLLLPPP BBBBB.BBBBBBBB .CCCCCCCC DDDDD-D EEEEE-E F GGGGZ 2 AAAAA HHH.HHHH III.IIII JJJJJJJ KKK.KKKK MMM.MMMM NN.NNNNNNNNRRRRRZ Key [1] - Line #1 label [2] - Line #2 label [AAAAA] - Catalog Number assigned sequentially (5-digit integer from 1 to 99999) [U] - Security Classification (U = Unclassified) [YYLLLPPP] - International Designator (YY = 2-digit Launch Year; LLL = 3-digit Sequential Launch of the Year; PPP = up to 3 letter Sequential Piece ID for that launch) [BBBBB.BBBBBBBB] - Epoch Time--2-digit year, followed by 3-digit sequential day of the year, followed by the time represented as the fractional portion of one day [.CCCCCCCC] - ndot/2 Drag Parameter (rev/day2)--one half the first time derivative of the mean motion. This drag term is used by the SGP orbit propagator. [DDDDD-D] - n double dot/6 Drag Parameter (rev/day3)--one sixth the second time derivative of the mean motion. The "-D" is the tens exponent (10-D). This drag term is used by the SGP orbit propagator. [EEEEE-E] - Bstar Drag Parameter (1/Earth Radii)--Pseudo Ballistic Coefficient. The "-E" is the tens exponent (10-E). This drag term is used by the SGP4 orbit propagator. [F] - Ephemeris Type--1-digit integer (zero value uses SGP or SGP4 as provided in the Project Spacetrack report. [GGGG] - Element Set Number assigned sequentially (up to a 4-digit integer from 1 to 9999). This number recycles back to "1" on the update following element set number "9999." [HHH.HHHH] - Orbital Inclination (from 0 to 180 degrees). [III.IIII] - Right Ascension of the Ascending Node (from 0 to 360 degrees). [JJJJJJJ] - Orbital Eccentricity--there is an implied leading decimal point (between 0.0 and 1.0). [KKK.KKKK] - Argument of Perigee (from 0 to 360 degrees). [MMM.MMMM] - Mean Anomaly (from 0 to 360 degrees). [NN.NNNNNNNN] - Mean Motion (revolutions per day). [RRRRR] - Revolution Number (up to a 5-digit integer from 1 to 99999). This number recycles following revolution number 99999. [Z] - Check Sum (1-digit integer). Both lines have a check sum that is computed from the sum of all integer characters on that line plus a "1" for each negative (-) sign on that line. The check sum is the modulo-10 (or ones digit) of the sum of the digits and negative signs.
As an example, here is a TLE for the X-Ray Timing Explorer (XTE) satellite telescope (now long since deorbited). I include the common (but optional) extra first line designating the mission name (XTE):
XTE 1 23757U 95074A 11333.55435324 .00010246 00000-0 30421-3 0 5229 2 23757 022.9893 121.5427 0007734 071.5825 288.5466 15.321190098829520
Not human-readable, but that is not the point. TLEs are designed so software can easily read the fixed-format information and operate on it. As long as you adhere to the standard, you can get TLEs from any authoritative source and your orbit prediction software will be able to use it. You can get TLEs for just about every tracked satellite from Space-Track, which is chartered by the US Department of Defense to distribute TLEs.
Orbit Determination
So where do TLEs come from? Most people will wait until NORAD/US Space Command releases their orbit data. However, there are five common ways to determine, from observations, the orbital elements. The first method is direct ranging using radar, which is very handy if you own your own radar installation but usually out of the realm of the amateur. The other four are mathematical methods where you make multiple observations of the satellite during one orbit, then use the appropriate mathematics to derive the orbital parameters. These four methods are triangulation, Gauss’s Method, Lambert’s Problem, and the Gibbs Method.
Direct ranging using radar (with Doppler shift), gives you the state vector (r,v) at some known time t. With this, you can derive the orbit because each orbit is unique and independent of the mass of the spacecraft. As mentioned back in Book 1, DIY Satellite Platforms, a satellite’s orbit does not depend on its mass, only its position and velocity. Both the ISS and a CubeSat next to it will orbit identically. This is why, when they eject CubeSats from the ISS, they give the CubeSats a little velocity kick—so they won’t remain right next to the ISS.
Using the radar timing to derive the distance plus the Doppler shift on the radar to get the velocity, you obtain a position and velocity of the satellite relative to the radar station. Add some geometry based on your latitude and longitude, and you obtain the exact state vector (r, v) for the satellite. This is beyond most non-radar-owning amateurs, but is the method our various governments use to track space items. If you don’t have this, you can use a series of ground observations to deduce the orbit. Which method you use depends on that data you can gather.
The remaining methods use multiple ground observations of the satellite during one orbital path. If, from the ground, you can observe the altitude (height above horizon) and azimuth (compass angle), or alternately the astronomical right ascension and declination, of a satellite, you know it is somewhere along that line of sight but you don’t know how far it is.
Triangulation consists of using two simultaneous measurements of an object from two different ground locations to geometrically calculate the object’s exact position. Each observation is one side of a triangle; the line connecting your two observers is the third side. Knowing these three sides and the angles involved, you can use triangle geometry to get the exact position. Therefore, two observers can get a single r vector for a satellite, if they are well coordinated in gathering their data. Satellites zip across the sky quickly, and triangulation requires the measurements be at the exact same time, but this is doable.
If you take three different observations of the object, you can use Gauss’s Method to deduce the complete orbital elements. This is the oldest and roughest method. Code to solve Gauss’s Method exists online and in orbital mechanics textbooks.
If you use radar or communications ranging or triangulation to get the distance, you have a position vector. With two exact position vectors (direction plus the distance to it) and the flight time between them, Lambert’s Problem is an algorithm that will give you the complete orbital elements. With three position vectors but no time information on when the data was taken, you can use the Gibbs Method (implemented in software) to derive the velocity vector v and fully define its state vector. Again, code to solve both is easily found. You now know its orbit.
Time
Satellite work uses Universal Time (UT) and Julian Date (JD) or Modified Julian Data (MJD). These are absolute time standards that do not consider time zones, local time, daylight savings time, or other human-centric factors. We use them for satellite work so we can share data using the same standard.
JD is the number of days since noon (UT) on January 1, 4713 BC. Yes, this tends to be a big number. MJD is a shorter version that also has the advantage of starting at midnight instead of noon UT. The formula is easily found online or in any astronomy textbook and is given, for a desired day/month/year, as shown here (US Navy, Fliegel and van Flandern algorithm, 1968):
JD = Day-32075+1461*(Year+4800+(Month-14)/12)/4+367*(Month-2-(Month-14)/12*12)/12-3*((Year+4900+(Month-14)/12)/100)/4
Note
This formula works best with a strongly typed computer language like Java or C, not with “duck typed” languages like Python. It assumes integer math for some of the leap day/year calculations. See the original source URL for specifics.
And the handy Modified Julian Day, MJD, is just: MJD = JD − 2400000.5.
Universal Time (UT) is simply midnight at Greenwich, England, which is midnight at the 0 latitude line of the Earth. UT runs as a 24-hour clock. You can convert from UT to your time zone by knowing your offset from UT. UT is sometimes considered the same as Greenwich Mean Time, which is sometimes (especially in the military) called Zulu.
Time can get finicky pretty quickly. There are slight variances between atomic time (UTC) and astronomically-defined time (UT1), and occasionally leap seconds are added to a year to align the two. For satellite use, fortunately, if you just stick with UT and MJD, you can freely exchange data and rely on software without having to delve into the details of time.
Satellite Time
Your satellite will probably not know what time it is. It doesn’t have to. You can imagine your satellite is in its own time zone. It is not important what time is on its internal clock, only that you know the offset between your satellite time and terrestrial UT.
When your satellite first powers up, it will have a default start time on its internal clock. This is the equivalent of a newly plugged in alarm clock reading 00:00. You need to record this time and compare it to your ground time. This gives you your clock offset.
While you could reprogram the satellite clock to the current time, this is not recommended. First, it is hard to do this accurately, and second, you have to know exactly when you sent the command plus how long it took the satellite to react to the command and reprogram. It’s also totally unnecessary. Instead, just let the satellite keep its own time, and remember its offset.
For example, if your spacecraft powers up at 17:57UT on Nov 14, 2014, but thinks it started at 12:00 Nov 1, 2014, you now know its offset is that the satellite is running 14 days and 5:57 hours behind your real time. Keep that offset and don’t mess with the satellite clock, because it’s unnecessary to do so and brings absolutely no advantage. Just let the clocks run as they are.
Relativity does alter time. Two objects moving at different speeds or facing a different amount of gravity will find out their clocks run at different rates. The two relativity factors (velocity and gravity) operate in opposite directions, so it turns out the ISS clocks run slower than on Earth (high velocity, roughly the same gravity), while GPS clocks at geosync orbits run faster (slower, further from gravity). The correction can be predicted, but it is easier to just periodically check the clocks against each other and update the offset.
The one implication for commanding your satellite is that if you have any timed commands you wish to do (anything programmed other than do this as soon as you receive this transmission), you need to make your command load match the spacecraft clock/date, not your ground date.
Most larger missions will, in their spacecraft software, include a data item of this offset so the spacecraft is aware of the time shift. For CubeSats, which typically run smaller processors with more immediate “do this as soon as told” commanding, this may not be necessary.
Reboots are another factor to consider. If your satellite reboots itself, either on command or due to radiation damage or a safehold event, the spacecraft clock might (yet again) reset itself to a new time. Just update your offset and you are good to go.
Ground Tracks
The final part of the picture is to project the elliptical orbit of the satellite onto the Earth’s surface, so you can see (at any given time) what spot on the Earth your satellite is over. This projection is the ground track. Ground tracks reveal an interesting property of orbits. While the orbit is fixed in space (nothing to alter it) and keeps tracing an eternal ellipse around the Earth, the Earth is meanwhile rotating beneath it. An orbit once around the Earth travels over a swath of land, but because the Earth rotated in that time, for most orbits, the start of the next orbit does not hover over the same spot as the start of the previous.
It is important to understand a ground track, because at a glance it tells you a lot about a mission. It gives you a rough idea of its orbit (low earth, geosynchronous, other), it tells you the orbital period, and it visualizes the times and places the satellite can see and can communicate with the ground. Here is a sample ground track showing two orbits in a row for the ISS (licensed under public domain via Wikipedia):

Each orbit of ISS takes about 100 minutes. During those 100 minutes, the Earth rotates 25 degrees in its daily cycle. So each ISS orbit ends up about 25 degrees apart from each other, in longitude.
In fact, from a ground track, you can deduce an orbital period. Here is a way of saying, “During one orbit, what fraction of the Earth’s 24-hour day did it rotate?” Take the longitude spacing between two equatorial crossings that go in the same direction (i.e., crossing the equator while heading north), in degrees, divide by 360 degrees, and multiply by one day: ![]() .
.
A second item is that you can tell the inclination i of the orbit by seeing what the highest (or lowest) latitude reached by the orbit is. That’s its inclination. In the case pictured, it’s roughly at 50 degrees of inclination.
Since you can derive the period (and therefore the semi-major axis) and the inclination from the ground track, that means the ground track provides two of the six orbital elements you need, without any advanced math.
There are many kinds of orbits, but the most common for CubeSats are low Earth orbits. These tend to be in the 250-500 km altitude range, with periods on the order of 90 minutes per orbit (depending on altitude and eccentricity). Eccentricities vary greatly—some are very eccentric (very elliptical), while others have nearly no eccentricity (circular). Software (of course) exists for plotting ground tracks given the orbital TLEs.
Every ground station should have a constantly updating plot of the ground track, not just for coolness but because it gives you a quick visual sense of when the satellite will next be available overhead to your ground station.
You will often find the requirements for your ground station broken down into three parameters—coverage area, slant range, and viewing time. Coverage area is, at any given time, the area on the ground that can see the satellite. Slant range is the line-of-sight distance from ground antenna to spacecraft. Viewing time is the duration that the ground station can see the spacecraft, assuming it is a suitable distance above the horizon.
Contact Passes
Your operational flow sequence is to build a schedule for contacts, consisting of:
-
Acquisition of satellite (AOS, also called acquisition of signal)—the time the satellite is above the horizon and expected treeline, and thus visible to your station
-
Location at AOS (relative to your station)
-
Loss of satellite/signal (LOS)—the time the satellite drops below the treeline and/or horizon and is no longer visible
-
Location of LOS
-
Path of satellite
This is easier done in software. Briefly, orbits by definition are a fully predictive path. The most common reference frame for the orbit coordinates is the geocentric frame. Software is used to map this to your local position on the Earth (the topocentric frame), and thus translate the satellite’s position into either an azimuth (compass direction to face) and altitude (height above the horizon), or a right ascension, declination pair (sky coordinates to point at), that your system can then track.
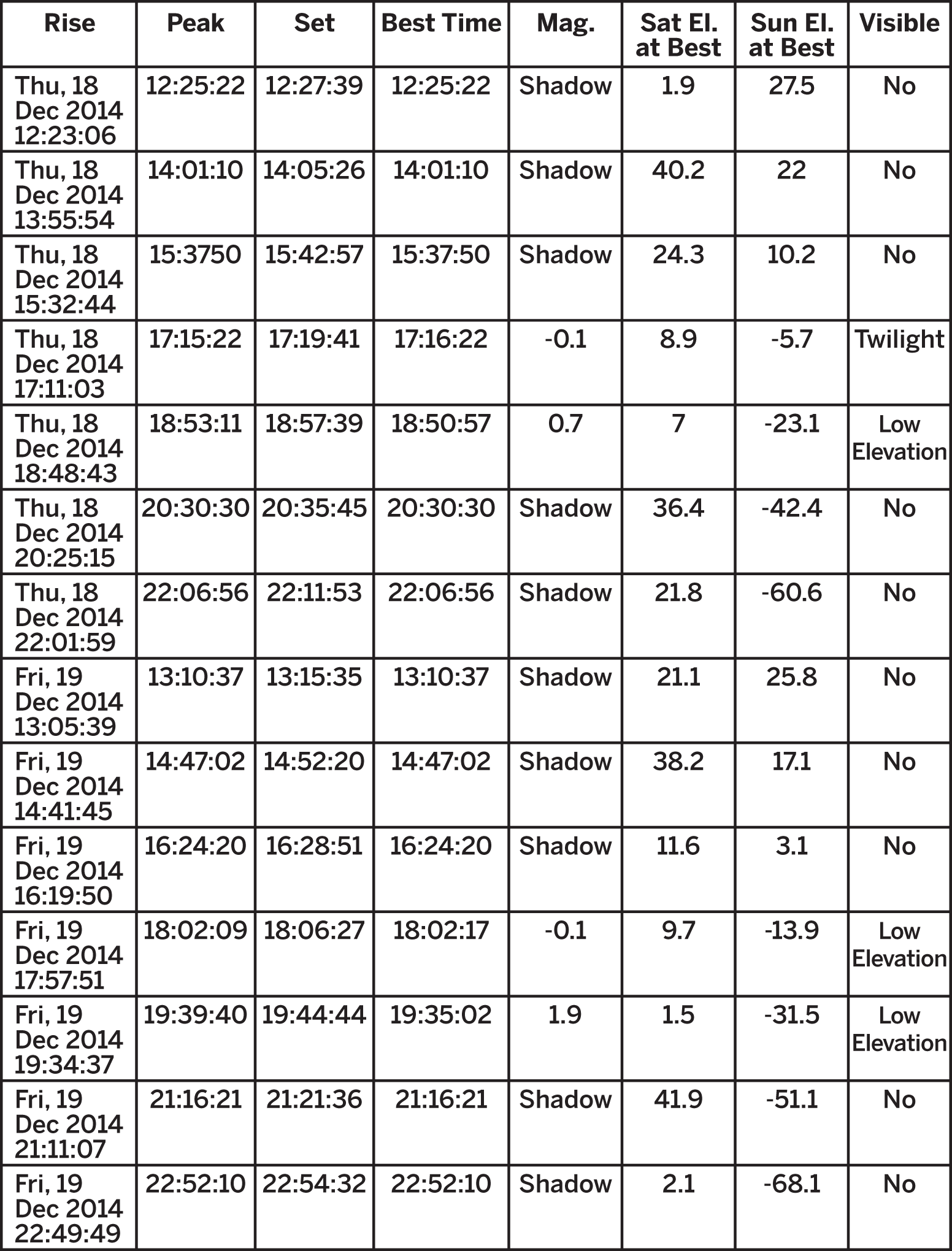
From the predictive elements you can visualize the ground tracks, and also generate a handy table of when your satellite is visible for a specific ground station. Here’s a sample set of data for the ISS for a typical day, generated by SATFLARE. For December 18th and 19th, there are seven consecutive passes per day ranging from two to five minutes. If you rule out passes below five minutes, you get four good passes per day. The following shows a sample set of data for the ISS on a typical day: