
8 Network equivalents and practical short-circuit current assessments in large-scale ac power systems
8.1 General
In this chapter, we discuss some of the practical issues faced by power system engineers engaged in short-circuit current assessment. We will present methods for the derivation of practical power system equivalents and describe how generation plant, power transmission and distribution networks may be represented in large-scale system studies. Some factors that maximise the calculated short-circuit current magnitudes are discussed as well as the range of uncertainties faced when making such calculations.
An introduction to the subject of probabilistic analysis of ac and dc short-circuit currents is presented, and finally an introduction to the theory of quantified risk assessment that may be used in the support of practical decisions concerning health and safety is given.
8.2 Power system equivalents for large-scale system studies
8.2.1 Theory of static network reduction
A power system equivalent is a mathematical model intended to represent a large portion of a power system network that may contain generation plant, network branches, load or any combination of these. Figure 8.1 illustrates the general case of a large interconnected network divided into two parts or subsystems where one part is to be reduced to a small equivalent network whereas the second part is to be retained in full. The two parts are connected by a number of boundary circuits. The derivation of the power system equivalent is carried out by a network reduction process and Figure 8.1 shows the terminology used.

Figure 8.1 Illustration of static network reduction terminology used in the calculation of power system equivalents
Network reduction is effectively a mathematical process that combines and eliminates network nodes and branches, so that the reduced equivalent contains smaller number of nodes and branches than the original network. The equivalent must be capable of reproducing the electrical behaviour of the original network at the boundary interface or nodes with sufficient accuracy. There are several types of power system equivalents the characteristics of which depend on the type of power system analysis being carried out. Equivalents may generally be classed as static or dynamic equivalents. The former may be used in dc and ac loadflow analysis, ac short-circuit analysis and harmonic analysis etc. The latter are used in power system stability and control analysis. In this chapter, we are concerned with the derivation of power system equivalents by network reduction for use in power system short-circuit analysis.
To illustrate the theory, subsystem 1 in Figure 8.1 is the power system network whose reduced equivalent is to be calculated as seen from nodes 1 to N which are termed the boundary nodes. All internal nodes and branches in subsystem 1 are to be eliminated in deriving the equivalent seen ‘looking’ from the boundary nodes into subsystem 1. The equivalent, as seen from the boundary nodes 1 to N consists of these nodes only, self (shunt) impedances to the reference node, usually the zero voltage node, and transfer impedances between all boundary nodes. All internal nodes and their interconnecting elements, e.g. lines, cables, transformers, etc., within subsystem 1 are to be eliminated by the reduction process. The reduced equivalent is illustrated in Figure 8.2. Both the boundary circuits and subsystem 2 are excluded from the reduction process.

Figure 8.2 Illustration of the power system equivalent produced by the network reduction process of subsystem 1 of Figure 8.1
The number of boundary nodes should not be very large otherwise a very large number of transfer or series branches will be generated between all boundary nodes in the equivalent and this is equal to N(N − 1)/2, where N is the number of boundary nodes. For example, if the original full network of subsystem 1 consists of 500 nodes and 1000 series branches, a 50-boundary node equivalent of subsystem 1 will result in a 1225 series branches!
8.2.2 Need for power system equivalents
During the early days of power system network analysis by digital computers, the need for network equivalents arose in order to allow the analysis of large-scale power systems to be practically possible given the limited computer storage and speed at that time. However, due to the huge developments in computer technology, this constraint is no longer applicable and very large power systems can nowadays be analysed quickly and cost effectively on personal computers.
However, power system equivalents are still required in industry. Practical examples include a distribution network company that owns and operates a distribution network and obtains its bulk power needs from a transmission company from one or several substations. The transmission network may be very large and an equivalent at one or more boundary nodes that are judiciously selected is usually sufficient for the short-circuit analysis needs of the distribution company. Similarly, the transmission company itself would not need to represent the distribution network in its entirety and an appropriate equivalent at one or more boundary nodes is usually sufficient. The added practical advantages are that the exchange and processing of data between companies is simplified, extraneous networks are removed from studies and the volume of data to be exchanged is reduced thus minimising the scope for errors in data handling. In general and in order to maintain sufficient accuracy of calculated short-circuit currents, experience shows that the network voltage level being studied should be represented in full as well as individual transformers stepping up or down to the next voltage level. For example, consider a network consisting of the following voltage levels: 400 kV transmission; 132 kV subtransmission; 33, 11 and 0.43 kV distribution. If the voltage level being studied is 132 kV, then the 132 kV network should be modelled in its entirety (all lines, cables, series reactors, etc.) as well as all 132 kV/400 kV autotransformers, 132 kV/33 kV and 132 kV/11 kV transformers. Power system equivalents may be placed at 400, 33 or 11 kV voltage levels if required as this will generally have a negligible effect on the precision of the results of short-circuit currents calculated on the 132 kV network.
Further, the ongoing liberalisation, restructuring and privatisation of electricity supply industries around the world since the 1990s have created the need for the calculation of equivalents. Generally, new electricity trading markets and new market participants are established, e.g. independent generating companies (Gencos), independent transmission system owners and/or operators (TSOs) and independent distribution system owners and/or operators (DSOs). Figure 8.3 illustrates some typical exchange requirements of either detailed network data or power system equivalents among the main participants in a typical electricity market. The actual flow of data may differ from one market to another depending on whether network owners are also operators of networks owned by other companies.

Figure 8.3 Illustration of exchange requirements of detailed network data or power system equivalents in a liberalised electricity market
Normally, network codes are also established that include legal obligations for the exchange of planning and operational data between various companies and much of the detailed technical data is usually classed as confidential. As a result, using Figure 8.3, TSOs may be required to provide equivalents to DSOs and vice versa. TSOs may also exchange equivalents among themselves but where the accuracy of these equivalents is of critical importance in terms of operating safe and secure interconnected transmission networks, full network data may be exchanged. Gencos and large industrial consumers are usually required to provide full network data to their host network operators who may not be allowed to pass it on to other network users due to confidentiality.
8.2.3 Mathematical derivation of power system equivalents
Conventional bus impedance or admittance matrices
Various mathematical methods can be used to carry out the network reduction process and derive the required power system equivalent. Most methods use either the bus impedance matrix or the bus admittance matrix of the entire network. For a W node network, let the bus impedance matrix be given by
 (8.1)
(8.1)For a given set of boundary nodes N, an impedance submatrix ZBound, whose diagonal terms correspond to the boundary nodes, can be extracted from the full network impedance matrix of Equation (8.1). For example, if the boundary nodes are nodes 2, 5 and 9, then ZBound is given by
 (8.2)
(8.2)In the general case of N-boundary nodes, and renumbering the nodes 1 to N for convenience, ZBound is given by
 (8.3)
(8.3)The terms of ZBound are directly extracted from the full network bus impedance matrix. Therefore, the diagonal terms represent the driving point or Thévenin’s impedances seen at the boundary nodes and the off-diagonal terms represent the transfer impedances between the boundary nodes. The nodal admittance matrix of the boundary nodes YBound is obtained by inverting ZBound as follows:
 (8.4a)
(8.4a)where
 (8.4b)
(8.4b)The diagonal element of node i, Yii is the sum of all admittances connected to node i including the shunt admittance yii to the reference node. Therefore, the shunt admittance connected at boundary node i is calculated by summing all the elements of row i of Equation (8.4a). An off-diagonal element in the nodal admittance matrix of Equation (8.4a) is equal to the negative of the admittance connecting the boundary nodes i and j.
Using Equation (8.3), the calculation of a single-node equivalent results in a single equivalent impedance admittance, as shown in Figure 8.4, as follows:

Similarly, the calculation of a two-node equivalent using Equation (8.3) results in the following nodal impedance and nodal admittance matrices:
and its inverse, using Equation (8.4) is expressed as
Equation (8.6) is general and allows for a situation where these matrices are non-symmetric, i.e. Z12 ≠ Z21 and y12 ≠ y12 such as in the case of quadrature boosters or phase shifting transformers as discussed in Chapter 4. For symmetric matrices, the two-node equivalent can be represented as a star equivalent impedance or a Π equivalent admittance circuit as shown in Figure 8.5.

Figure 8.5 Power system equivalent for two-boundary nodes: (a) star impedance equivalent and (b) π admittance equivalent
Again, assuming symmetric matrices, the calculation of a three-node equivalent results in the following matrices:
 (8.7a)
(8.7a)and
 (8.7b)
(8.7b)The three-node equivalent can be represented as a star equivalent impedance or Π equivalent admittance circuit as shown in Figure 8.6.

Figure 8.6 Power system equivalent for three-boundary nodes: (a) star impedance equivalent and (b) π admittance equivalent
It is interesting to note that two-boundary nodes are described by a single-Π equivalent circuit whereas for three-boundary nodes, three-Π equivalents are required. Therefore, it is to be expected that the calculation of a multiple-node equivalent results in multiple-Π equivalent networks. Although a one-node increase in the number of boundary nodes adds one shunt impedance only, it, however, adds transfer admittances/impedances to all the original boundary nodes. Therefore, the number of transfer admittances/impedances rises rapidly with the number of boundary nodes. In practice, the transfer admittance/impedance between any two nodes is equal to the apparent impedance between these nodes in the original unreduced network. Thus, some transfer impedances will be very large (admittances very close to zero) where nodes are electrically quite remote from each other and hence these branches may be neglected.
Direct derivation of admittance matrix of power system equivalents
The conventional method described above requires the derivation of the entire network bus impedance matrix using techniques such as formulating and indirectly inverting the bus admittance matrix or by a step-by-step impedance matrix building process. An alternative is to derive the admittance matrix of the reduced equivalent directly from the full network admittance matrix given a specified number of boundary nodes. Figure 8.7(a) shows an interconnected passive linear network with N-boundary nodes and it is required to reduce the entire network to an equivalent as seen from these boundary nodes. All passive elements, e.g. lines, cables and transformers, are represented by their appropriate impedances. Rotating machines, e.g. synchronous generators are represented by an appropriate positive phase sequence (PPS) impedance such as subtransient or transient impedance, and their voltage sources are short-circuited.

Figure 8.7 Direct derivation of a power system equivalent of N-boundary nodes: (a) network to be reduced as seen from N-boundary nodes and (b) multiple-π equivalent admittance circuit
In the calculation of negative phase sequence (NPS) and zero phase sequence (ZPS) equivalents, the machines are represented by their NPS and ZPS impedances to earth. The technique is based on the connection of a voltage source at each boundary node in turn, measuring the injected current into the boundary node and the resultant voltages at all other boundary nodes. The injected voltage source at each boundary node must have the same magnitude and phase angle, if any, though the latter may be zero. The magnitude of the voltage source is arbitrary, but a sufficiently large value may be used to improve the precision of calculated parameters.
The objective is to derive the equivalent nodal admittance matrix of the N-boundary nodes which is represented by the multiple-Π circuit of Figure 8.7(b). A current I(1) injected into node 1 will produce currents and voltages throughout the network including voltages at the boundary nodes 1, 2, 3,…, N. From Figure 8.7(b), we can write
wherein y11 is the shunt admittance between node 1 and the reference node, y12 is the transfer admittance between nodes 1 and 2, V1(1) is the voltage at node 1 due to injected current I(1), V>2(1) is the voltage at node 2 due to injected current I(1), etc. Rearranging Equation (8.8), we obtain
where
At boundary node 2, where the injected current is 0, we can write
or
where
and similarly for nodes 3, 4, 5,…, N. For node N, we obtain
where
Equations (8.9a) and (8.10a) to (8.11a) can be written in matrix form as follows:
 (8.12)
(8.12)The process is now repeated for boundary node 2. A current I(2) is now injected into node 2 and this will produce currents and voltages throughout the network including voltages at the boundary nodes 1,2, 3,…, N. Using a similar derivation process to that of Equation (8.12), we obtain
 (8.13)
(8.13)Continuing with the above current injection process, i.e. to boundary nodes 3,4,…, N, writing the derived equations in matrix form in each case, we can collect the individual matrix Equations (8.12), (8.13), etc., into the following system of matrix equations:
 (8.14)
(8.14)where IN × N is a diagonal N × N matrix of known injected currents and VN × N is a known N × N non-symmetric matrix of resultant voltages, i.e. V1(2) ≠ V2(1) in the general case. Knowing the injected currents and voltages into the boundary nodes, the equivalent admittance matrix of the TV-boundary nodes can be calculated as follows:
where YN × N is a general non-symmetric admittance matrix. In most practical system networks, YN × N is actually a symmetric matrix. The admittance connecting node i to any other boundary node, e.g. yij, is equal to the negative of the corresponding off-diagonal element of YN × N. The shunt admittance at boundary node i shown in Figure 8.7(b) is given by
 (8.17)
(8.17)The impedances of the admittance branches of Figure 8.7(b) are calculated as follows:
and
In practical applications, the technique described above can be used to calculate more than one PPS equivalent such as subtransient and transient equivalents corresponding to subtransient and transient reactances of machines. In deriving the PPS equivalent, and depending on the national approach followed, line and cable shunt susceptance and shunt admittance of static loads may be excluded. In addition, the technique can also be directly applied to the calculation of NPS and ZPS equivalents. The shunt elements that may be excluded in the PPS equivalent calculation may also be excluded in the NPS equivalent calculation but they are generally included in the calculation of the ZPS equivalent.
Generalised time-dependent power system equivalents
Power system PPS, NPS and ZPS equivalents are calculated and included in PPS, NPS and ZPS models of the power system network used to calculate both balanced and unbalanced short-circuit fault currents. A generalised PPS time-dependent power system equivalent for a single node consists of a voltage source behind a series PPS impedance. The source voltage is the PPS Thévenin’s or open-circuit voltage and the PPS impedance consists of a resistance in series with a time-dependent reactance. In the general case where the equivalent contains active sources, a generator model can be used to represent the equivalent whose PPS reactance at any point in time is given by
 (8.19)
(8.19)where XEq, ![]() and
and ![]() are the steady state, transient and subtransient PPS reactances of the equivalent at the boundary node.
are the steady state, transient and subtransient PPS reactances of the equivalent at the boundary node. ![]() and
and ![]() are the transient and subtransient time constants of the equivalent at the boundary node. The NPS and ZPS equivalent impedances at the boundary node, denoted 1, are
are the transient and subtransient time constants of the equivalent at the boundary node. The NPS and ZPS equivalent impedances at the boundary node, denoted 1, are ![]() and
and ![]() , respectively. Figure 8.8 illustrates the PPS, NPS and ZPS equivalents of a single-boundary node.
, respectively. Figure 8.8 illustrates the PPS, NPS and ZPS equivalents of a single-boundary node.

Figure 8.8 Sequence power system equivalents for a single-boundary node: (a) PPS time-dependent equivalent, (b) PPS subtransient equivalent, (c) PPS transient equivalent, (d) NPS equivalent and (e) ZPS equivalent
The sequence representation of a single-node equivalent can be extended to equivalents of two or more boundary nodes. The shunt branch connected at each boundary node in the π or multiple-π equivalents represents an equivalent source of short-circuit current, i.e. rotating plant. Figure 8.9 illustrates the PPS, NPS and ZPS π admittance circuit equivalents for two-boundary nodes.

8.3 Representation of power systems in large-scale studies
8.3.1 Representation of power generating stations
In a practical power system, the amount of installed generation plant exceeds the system peak demand by an appropriate margin, typically 20%, to allow for generation unavailability and demand forecasting errors. In order to maximise the magnitude of calculated short-circuit currents in planning and design studies, all generation plant is usually assumed operating but appropriately scaled to match system demand plus power losses. For off-peak demand year round operational planning studies, usually only scheduled generation dispatched to meet system demand, system frequency control and operating reserves may be used in the calculation of short-circuit currents.
In Chapter 5, we discussed the modelling of individual generators for short-circuit analysis purposes. In a power station comprising a number of generators that may be connected to the power system network being studied either directly or through their own step-up transformers, the precision in the calculated short-circuit currents is generally improved if each generator is represented individually. However, the representation of power stations as equivalents is generally adequate if they are electrically quite remote from the locations being studied.
As presented in Chapter 5, power stations driven by renewable energy sources such as wind are being connected in increasing numbers and sizes both to distribution and transmission networks. A single wind farm power station may comprise, tens to hundreds of generators rated at, say, 2 to 5 MW each. The large number of small generators in such a wind farm may be comparable to the total number of large generators individually modelled in the entire network of an average size utility. Figure 8.10(a) illustrates a typical layout of a 128 MW offshore wind farm consisting of eight rows of eight wind turbines each and each wind turbine generator is rated at 2 MW. Each turbine generator has its own transformer that steps up to medium voltage, typically 20–33 kV, and all are connected by cables to a single collector busbar.

Figure 8.10 Offshore wind farm and sequence equivalents: (a) typical layout of a 128 MW wind farm (64 generators) and (b) sequence equivalents at collector busbar (boundary node(s))
The wind farm may be modelled in its entirety including all 64 generators for local wind farm connection design studies. However, for studies at electrically remote locations on the wider host distribution, subtransmission or transmission systems, a reduced short-circuit equivalent for the wind farm generators, their transformers and cables at the collector busbar is usually sufficient. PPS, NPS and ZPS equivalents would be required to completely describe the equivalent as illustrated in Figure 8.10(b). The ZPS equivalent impedance is usually infinite because the transformer is usually delta-star connected.
8.3.2 Representation of transmission, distribution and industrial networks
For short-circuit analysis on transmission systems, transmission networks are usually modelled in their entirety in order to avoid loss of accuracy of calculated short-circuit currents. Generators connected to transmission networks are modelled in full and distribution networks supplied from a transmission network are modelled in part with appropriate equivalents for the remainder.
For short-circuit analysis on distribution systems, distribution networks may be modelled in their entirety as well as generators connected to these networks. Transmission networks supplying these distribution networks may be modelled using appropriate equivalents.
For short-circuit analysis in power station auxiliary systems or industrial power systems where a significant number of motors of different sizes may be used, a full representation of the entire station auxiliary and industrial networks is usually required. However, groups of parallel low voltage, e.g. 0.415 kV may be lumped together to form a single equivalent model for each. The modelling of motors above 1 kV individually improves calculation accuracy.
Where ac superposition analysis is used, general power system static load at bulk supply substations in transmission and distribution networks is usually modelled as shunt PPS and NPS impedances derived from the prefault load voltage, MW and MVAr demand. The load ZPS impedance is derived from the network and transformer impedances that provide a path for ZPS currents. Where required by national practice, small induction motors forming part of the general substation load may be modelled as an equivalent motor connected at the substation.
8.4 Practical analysis to maximise short-circuit current predictions
8.4.1 Superposition analysis and initial ac loadflow operating conditions
The magnitude of short-circuit current is primarily determined by the amount of connected generation plant and network topology. Where the superposition analysis technique is used, such as that described by the UK ER G7/4 guide, and although of secondary influence, the effect of initial network and generating plant operating conditions is nonetheless important when assessing the short-circuit duties on existing switchgear. A loadflow operating condition that gives a particular network voltage profile, transformer tap positions and machine internal voltages that maximise the short-circuit current at one location, will not necessarily do so at other locations in the network. For example, short-circuit currents at locations remote from generation plant will be higher for higher prefault voltages at these locations. However, at generating stations with generator-transformers equipped with on-load tap-changers, the short-circuit currents delivered on the high voltage side of the transformers will be higher for lower prefault voltage on the transformer high voltage side. This is because the fault currents delivered from this power station unit depend on the ratio of the generator impedance to transformer impedance and on the transformer tap position. Similarly, a lower voltage profile on a subtransmission or distribution system, e.g. 132 kV, will generally cause an increase in the short-circuit current delivered through autotransformers from the transmission system, e.g. 275 or 400 kV. Also, a lower voltage at 132 kV together with a higher voltage at 33 or 11 kV will cause higher short-circuit currents at 33 and 11 kV delivered through the 132 kV/33 kV and 132 kV/11 kV transformers which are equipped with high voltage winding on-load tap-changers. Therefore, in calculating maximum short-circuit currents at various locations in a power system, there may be conflicting requirements in the loadflow study, so that a single study cannot be established to calculate maximum short-circuit currents at various locations.
8.4.2 Effect of mutual coupling between overhead line circuits
In Chapter 3, we showed that for double-circuit overhead lines, there will be like sequence PPS, NPS and ZPS couplings between the two circuits where six-phase transpositions are assumed and ZPS coupling only where ideal nine-phase transpositions are assumed. The PPS/NPS inter-circuit mutual impedances are generally small and typically only a few per cent of the PPS/NPS self-circuit impedances. However, the ZPS inter-circuit mutual impedance can be significant in comparison with the ZPS self-circuit impedance. To illustrate the effect of ZPS mutual coupling on the magnitude of the ZPS short-circuit current, consider the ZPS representation of a double-circuit overhead line shown in Figure 8.11(a) where the two circuits are denoted A and B.

Figure 8.11 Effect of ZPS mutual coupling between two overhead line circuits: (a) ZPS inter-circuit coupling with both circuits in service; (b) ZPS inter-circuit coupling with one circuit out of service and earthed at both ends
Using Equation (3.89a) from Chapter 3, the series voltage drop across circuits A and B are![]() and
and ![]() The effective ZPS impedance of each circuit is given by
The effective ZPS impedance of each circuit is given by ![]() and
and ![]() if the ZPS currents
if the ZPS currents ![]() and
and ![]() are equal and flow in the same direction. However, if the ZPS currents are equal but flow in the opposite direction,
are equal and flow in the same direction. However, if the ZPS currents are equal but flow in the opposite direction, ![]() and
and ![]() . Therefore, if the ZPS mutual impedance between the two circuits is neglected in the modelling of the line, the short-circuit current calculated may be either an overestimate or an underestimate depending on the direction of ZPS currents flowing in each circuit. Where the ZPS currents flow in the same direction, there will be an overestimate but where the ZPS currents in each circuit flow in opposite directions, there will be an underestimate.
. Therefore, if the ZPS mutual impedance between the two circuits is neglected in the modelling of the line, the short-circuit current calculated may be either an overestimate or an underestimate depending on the direction of ZPS currents flowing in each circuit. Where the ZPS currents flow in the same direction, there will be an overestimate but where the ZPS currents in each circuit flow in opposite directions, there will be an underestimate.
Figure 8.11(b) shows another practical case of a double-circuit overhead line with two identical circuits and with one circuit assumed of service and earthed at both ends for safety reasons. The voltage drops across each circuit are given by ![]() and
and ![]() . Since circuit B is earthed at both ends,
. Since circuit B is earthed at both ends,
Therefore, the effective impedance of the in-service circuit A is given by

For example, for a typical 400 kV double-circuit line used in England and Wales with four subconductor bundle per phase, the ZPS impedance per circuit and the ZPS mutual impedance between the two circuits are![]() = (0.103 + j0.788)Ω/km and
= (0.103 + j0.788)Ω/km and![]() = (0.085 + j0.420)Ω/km, respectively. Therefore, the effective impedance of one circuit with the second circuit earthed at both ends is equal to
= (0.085 + j0.420)Ω/km, respectively. Therefore, the effective impedance of one circuit with the second circuit earthed at both ends is equal to ![]() = (0.0415 + j0.565)Ω/km. This represents a 28.7% reduction in the magnitude of the series impedance and an increase in its effective X/R ratio from 7.6 to 13.7. The increase in X/R ratio occurs because the phase conductors of the earthed circuit effectively act as short-circuited secondary turns where a significant proportion of the return short-circuit current flows via these ‘turns’ and much less returns via the single conductor earth wire.
= (0.0415 + j0.565)Ω/km. This represents a 28.7% reduction in the magnitude of the series impedance and an increase in its effective X/R ratio from 7.6 to 13.7. The increase in X/R ratio occurs because the phase conductors of the earthed circuit effectively act as short-circuited secondary turns where a significant proportion of the return short-circuit current flows via these ‘turns’ and much less returns via the single conductor earth wire.
8.4.3 Severity of fault types and substation configuration
Figure 8.12 shows typical air and gas insulated substations that include several circuit-breakers. For the assessment of the making and breaking (interrupting) duties of existing circuit-breakers, the selection of new circuit-breakers or the assessment of substation infrastructure integrity, both three-phase and single-phase short-circuit fault currents are usually calculated. In isolated or high impedance earthed systems, three-phase fault calculations are sufficient but for solidly earthed systems such as 132 kV and above in the UK, single-phase fault currents have to be calculated as well. Single-phase short-circuit currents will be higher than three-phase short-circuit currents at locations where the ZPS equivalent impedance at the fault point is lower than the PPS/NPS impedance. Figure 8.13(a) shows the direction of short-circuit currents for a close-up fault at F before fault clearance in a double-busbar or transfer bus substation layout. The maximum short-circuit breaking (interrupting) duty on circuit-breaker A is calculated assuming it is the last circuit-breaker to open to clear the fault, i.e. all circuit-breakers B, C and D have already opened. This duty can also occur under automatic circuit-breaker reclosure onto a persistent short-circuit fault. The two duty conditions are depicted in Figure 8.13(b).
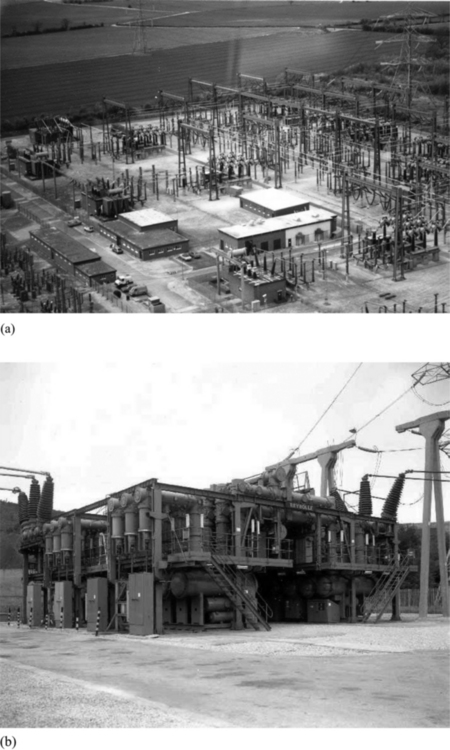
Figure 8.12 Air and gas insulated substations: (a) 400 kV outdoor air insulated substation and (b) 275 kV outdoor gas insulated substation
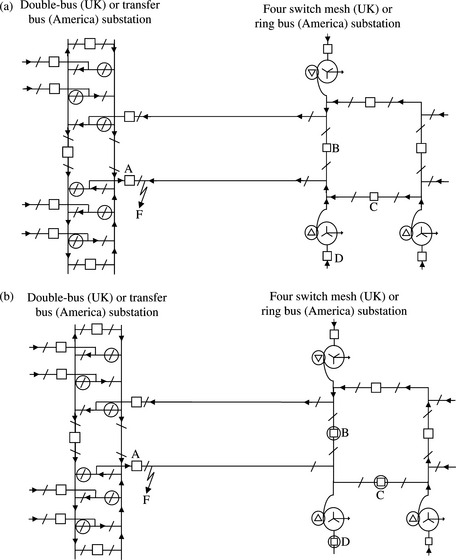
Figure 8.13 Illustration of the effect of substation configuration on maximum short-circuit currents: (a) direction of current flows for a short-circuit fault at F before fault clearance and (b) A is last circuit-breaker to clear short-circuit fault F or A recloses onto a persistent fault F by automatic circuit reclosure
Bus coupler and bus section circuit-breakers, shown as A and B in Figure 14.8(a) and (b) are required to make and interrupt the maximum fault current associated with short-circuit infeeds from all connected circuits when energising a section of busbar which is still inadvertently earthed. The resultant direction of current flow in the substation is also indicated. The making onto such a fault also imposes maximum duty on substation infrastructure equipment.
Figure 8.15(a) illustrates the direction of short-circuit current flows for a close-up fault on an outgoing line in a 1 and ½ circuit-breaker substation where circuit-breaker A or B being the last to open will be required to clear the fault. Figure 8.15(b) illustrates a busbar short-circuit fault on the same substation configuration, cleared by opening of circuit-breakers A, B, C and D with the last to open seeing the duty.

8.5 Uncertainties in short-circuit current calculations: precision versus accuracy
The confidence that can be assigned to the calculated short-circuit currents depends on several factors which can be generally classified as follows:
(a) Confidence in the power system generation, network and load data used in the calculations.
(b) Confidence in the mathematical models used for power system plant.

Figure 8.14 Short-circuit currents seen by bus section and bus coupler circuit-breakers in double-busbar substations: (a) inadvertent energising of a ‘faulted’ busbar section using bus coupler circuit-breaker A and (b) inadvertent energising of a ‘faulted’ busbar section using bus section circuit-breaker B
(c) Confidence in the accuracy of analysis techniques used to calculate the ac and dc short-circuit currents.
(d) Confidence in the ability of engineers to correctly manage, create and use the system data, network topology diagram and network model.
(e) Confidence in the engineers’ ability to understand and correctly apply the relevant national or international engineering standard being used, e.g. IEC 60909, UK ER G7/4 or IEEE C37.010.
(f) Confidence in the engineers’ ability to make correct interpretation of short-circuit current results and to make appropriate engineering judgement.
(g) Confidence in the rated data or declared capabilities of circuit-breakers and substation infrastructure equipment.
At the system planning and design stage, actual data for new plant is usually not available and typical generic data is generally used as informed by similar plant family types already in use. Uncertainty in plant data is defined as the interval of design tolerances associated with plant generic data and these should be known and factored into the analysis. For example, design tolerances are ±15% on subtransient and transient reactances for synchronous machines manufactured to IEC 60034 Standard. Actual data for some existing small generation plant connected to distribution networks may not be known due to age of plant or change of ownership, etc. In such situations, typical parameters from similar plant may be used. Design tolerances for impedances of generator-transformers and network transformers manufactured to IEC 60076 Standard are ±10% and ±15% for two-winding and three-winding transformers, respectively. For autotransformers, the design tolerance is ±15%. Factory test certificates for transformers and generators, when and where available, are usually the best-quality data. For overhead lines, PPS/NPS and ZPS impedances (and susceptances) are usually calculated based on line constructional data as presented in Chapter 3. Various assumptions are made such as uniform conductor height above ground, transposition, uniform earth resistivity (ZPS impedance varies with the logarithm of earth resistivity) for the entire line length, etc. Generally, the PPS impedances may have small tolerances of a few per cent, but the tolerances for the ZPS impedances are generally larger and may possibly reach 20%. There may also be a tolerance of a few per cent, on the length of installed lines which affects the total line impedance. For underground cables, the sequence impedances are normally measured at commissioning and in practice this is the only way of obtaining a good snapshot estimate of the ZPS impedance. There may also be a significant tolerance in the short-circuit infeed from induction motors due to unknown quantity and/or parameters. In addition, there is a significant uncertainty of the short-circuit infeed from small single-phase induction motors forming part of the general power system load.
The actual tolerances associated with various plant may be positive for some plant and negative for others so that some may cancel others out. The effect of impedance tolerances on the magnitude of short-circuit current depends on the location of the fault and the relative short-circuit contribution through the plant. For example, consider a generator-transformer unit with machine subtransient reactance and transformer reactance of 15% on MVA rating each. A 15% underestimate in the machine subtransient reactance will result in 8% overestimate in the short-circuit current delivered on the transformer’s high voltage side. However, if the contribution of the generator-transformer unit is 20% of the total short-circuit current, the effect of the 15% underestimate in the generator sub-transient impedance will only be 1.6% overestimate in the total short-circuit current.
Mathematical models used in steady state power frequency analysis for lines, cables, transformers, etc. are quite accurate and together with the analysis technique used, should contribute very little error to the ac component of short-circuit current at a fixed point in time, e.g. at the instant of fault. However, the estimation of the time variation of the ac component in fixed impedance analysis techniques is necessarily approximate and depending on the approximation method used this will lead to some error. The error in the dc component of short-circuit current depends on the analysis technique used. If this component is estimated from the system X/R ratio at the fault point, then, in the author’s experience, the range of error may be up to ±5% if IEC 60909 Method C is used or up to +30% if IEEE C37.010 Method is used. IEC Method B can give substantial underestimates and its use is not recommended.
In most power system networks, there is a very large volume of data to be managed; that of the existing plant and network where some plant may be 40 or 50 years old, and that of the future network that includes modifications, extensions and decommissioning. Errors can be reduced if there is a single source of technical data such as a single database that is continuously kept complete and accurate. This is not a trivial task! The problem may be compounded where those responsible for the data in such a database are not the ones that use the data in network analysis or are not even engineers. In the author’s experience, technical data can be the biggest single source of error in short-circuit analysis!
Standardisation of the short-circuit work undertaken through documented quality control procedures will contribute to precision in the calculations. Uncertainties can be reduced by the use of sensitivity studies on assumptions made in order to provide a measure of the possible range of errors. However, precision does not guarantee accuracy! Precision is a measure of consistency or repeatability and relates to variations between individual calculations of the same quantity. Accuracy, however, is the degree of closeness that the calculated value approaches the true value.
Given the discussion above, is there a need, in practice, for a safety margin to be applied to the calculated maximum short-circuit current results? The answer obviously depends on the views taken regarding all the above factors and individual practices. For example, an approach such as that of IEC 60909 that relies on acceptable accuracy for the intended purpose may be deemed not to require additional safety margin. Equally, an approach such as that of the UK ER G7/4 that relies on the ability of power system engineers to search for and find the worst-case realistic short-circuit currents may be deemed not to require an additional safety margin. In practice, the application or otherwise of safety margins depend on the philosophy of individual companies including attitude to safety, investment, asset risk management and risk aversion.
8.6 Probabilistic short-circuit analysis
8.6.1 Background
The international standards of short-circuit current calculation, IEC 60909 and IEEE C37.010 are essentially deterministic in approach. The former is aimed at calculating results with acceptable accuracy for their intended purpose and the latter is generally aimed at calculating sufficiently conservative results. The UK ER G7/4 approach is also deterministic although it is aimed at the calculation of worst-case realistic results. These approaches include various assumptions aimed at calculating maximum values of short-circuit currents. On the other hand, probabilistic short-circuit analysis techniques are generally aimed at calculating a probability distribution of short-circuit current magnitudes at various locations in the system. This can provide information on the probability of short-circuit currents exceeding certain values or falling below certain values.
8.6.2 Probabilistic analysis of ac short-circuit current component
Probabilistic analysis techniques of ac short-circuit current component recognise that the magnitude of short-circuit current at a given location is primarily determined by the following three random statistical factors:
(a) the nature of the fault type e.g. single-phase, three-phase, etc
(b) the location of the fault e.g. on busbars, on outgoing lines from a substation, etc
(c) the state of the power system in terms of generation plant, network state and demand level at the time of the occurrence of the fault
The deterministic short-circuit analysis approach considers (a) and (b) above although not faults some distance away from substations except where tower currents are being calculated. However, for network design studies, this approach does not consider (c) but instead it usually assumes that all installed generation plant is available and connected to the network and can contribute short-circuit current. The network elements e.g. lines and transformers etc are all assumed to be 100% available. In network operational planning studies, 100% availability of generation plant and network may be assumed in the area close to the faulted locations but not on a system wide basis.
The probabilistic short-circuit analysis approach aims at avoiding the compounding of safety factors or the assumption of simultaneous coincident worst case conditions. Thus, many power system states are considered and analysed at the time of occurrence of the fault and a fault current is calculated for each state.
The probability distributions of the calculated short-circuit current magnitudes may be compared to the deterministic or probabilistic rating of circuit-breakers or busbars, as required, as illustrated in Figure 8.16(a) in a typical 400 kV system.
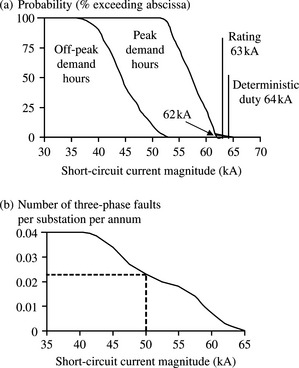
Figure 8.16 Illustration of probabilistic analysis results of short-circuit current ac component in a 400 kV transmission system: (a) probability distribution of ac short-circuit current magnitude and (b) risk of three-phase short-circuit faults exceeding abscissa
The current magnitude calculated by the deterministic approach is 64 kA and is greater than the circuit-breaker rating of 63 kA. The maximum current calculated by the probabilistic approach for peak demand hours is 65 kA. Assuming a 1 kA safety margin is used, there is a 2% probability of exceeding 62 kA. These results may be combined with an assumed uniform probability of three-phase fault occurrence throughout the year per substation, in the absence of better information. The outcome is illustrated in Figure 8.16(b). This shows that 0.023 faults per annum exceed 50 kA or a risk of one fault in 43.5 years exceeding 50 kA. Also, this shows that 0.04 faults per annum exceed 62 kA or a risk of one fault in 250 years exceeding 62 kA. The off-peak demand hours show much lower short-circuit currents due primarily to the reduced amount of connected generation plant.
Monte Carlo simulations may be used to simulate the behaviour of the power system under fault conditions by applying faults at random times during a year of system operation and at random locations in the network. However, the description of such simulations is outside the scope of this book. Probability distributions of subtransient, transient or other intermediate short-circuit current magnitudes may be calculated.
8.6.3 Probabilistic analysis of dc short-circuit current component
Assumptions of international standards
The international standards of short-circuit current calculation, IEC 60909, IEEE C37.010 and UK ER G7/4 make similar assumptions regarding the dc component of short-circuit fault current. The standards generally assume that the short-circuit fault results in maximum dc offset on the faulted phase for a single-phase short-circuit fault or one of the phases for a three-phase short-circuit fault. IEEE C37.010 considers that this corresponds to full 100% asymmetry except at generator busbars where asymmetry greater than 100% may occur. IEC 60909 makes similar assumption of full asymmetry and notes that the dc current component may exceed the peak value of the ac component for some near to generator faults. Similarly, ER G7/4 assumes full asymmetry of dc current component.
Factors affecting dc short-circuit current magnitude
In IEC 60909 and as implied in IEEE C37.010 and ER G7/4, evolving short circuit faults are not considered. Therefore, a three-phase short circuit is assumed to occur simultaneously on all three phases. This is important because sequential short-circuit faults can lead to dc current asymmetry greater than 100% but this is not dealt with in this book.
Recalling Equation (1.17) derived in Chapter 1 for the dc short-circuit current component following a simultaneous three-phase short-circuit fault, we have
 (8.20)
(8.20)where
and
The magnitude of the dc current component in any phase depends on the magnitude of the initial or subtransient ac current component Irms and the instant on the voltage waveform ϕr when the short circuit occurs. The rate of decay of the dc current component depends on the time constant L/R or initial X/R ratio at the fault point (X/R = ωL/R). The X/R ratio will vary with the fault location and fault type as well as the state of the system at the time of short circuit. The system state is determined by the availability of generation plant and network elements as well as the availability of any induction motor short-circuit infeed. The probability distributions of initial three-phase and single -phase X/R ratios at a 400 kV location comprising a large power station, a number of transmission circuits and a local distribution load are illustrated in Figure 8.17. The X/R ratios are calculated using IEC 60909 Method C. The results shows that the rated X/R ratios are almost always exceeded at such a location.
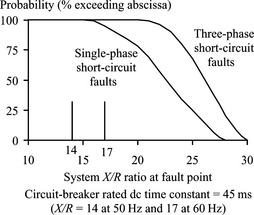
Figure 8.17 Illustration of a typical probability distribution of X/R ratio of de short-circuit current
From Equation (8.20), the initial magnitude of the dc current component in any phase at the instant of short circuit, t = 0, expressed in per cent of the peak ac short-circuit current component is given by
Maximum dc current offset or full asymmetry assumed by the deterministic IEC, IEEE and ER G7/4 calculations occurs for ϕ - tan−1(ωL/R) = - π;/2 or
At any value of phase R angle ϕr, one or two dc current components will be negative. However, since we assumed a simultaneous three-phase fault condition, it is instructive to plot the absolute value of Equation (8.23) and this is shown in Figure 8.18. The initial dc current is plotted against the voltage phase angle ϕr for the IEC 62271 and IEEE C37.04 circuit dc time constant of 45 ms as well as the additional maximum quoted IEC 62271 circuit dc time constant of 120 ms. It is shown that for any value of ϕr, one of the three phases will have a dc current component of at least 86.6%. The effect of the dc time constant on the initial magnitude of the dc current is, as expected, negligible.

Figure 8.18 Absolute initial magnitude of dc current component in the three phases under a simultaneous three phase short-circuit fault
The above analysis assumed a simultaneous three-phase short-circuit fault. In the case of a circuit-breaker being inadvertently closed onto a network where a three-phase short-circuit fault already exists, as discussed in Section 8.4.3, the above analysis will equally apply if it is assumed that the three poles of the circuit-breaker close simultaneously. In practice, the three poles do not close mechanically at the same time due to pole stagger or span which, according to IEC 62271 Standard, should not exceed half cycle of power frequency (10 ms for 50 Hz systems and 8.33 ms for 60 Hz systems). Also, electrical closure or prestrike may occur before mechanical closure and this is discussed in the next section.
Probabilistic analysis of voltage phase angle ϕ
In practice, the deterministic assumption of maximum dc offset has a substantial impact on the sizing of circuit-breakers and substation infrastructure such as busbars particularly with the increasing X/R ratios in power systems. The assumption of near to zero voltage phase angle ϕr results in maximum dc offset so the question is: For non-simultaneous closure of the three circuit-breaker poles when closing onto a fault, what is the probability of one of the poles closing at a voltage phase angle near zero?
Now, we describe the factors that can give rise to the dispersion between the three circuit-breaker poles. First, we note that there are two distinct cases relating to whether the circuit-breaker is independent pole operated, i.e. has one closing mechanism per pole, or three-pole operated, i.e. has one closing mechanism driving all three poles. The latter results in near simultaneous mechanical closure so that the mechanical dispersion is very small, controllable and fixed. However, for circuit-breakers with independent pole operation, larger and variable dispersion can occur since there is no mechanical coupling between the three poles. Further, for any pole, using Figure 8.19, there is a dispersion in the time lag between the closing order Tco and the instant of actuation of the closing mechanism Ta. Second, there is a dispersion in the operating time between actuation and instant of mechanical closure when contacts touch Tmc. Also, electrical closures due to electrical breakdown or prestrikes between the approaching contacts, at Tec, may occur. These parameters are illustrated in Figure 8.19 for a single phase or pole of the circuit-breaker. Curve (i) is a cosinusoid of period 4 × Tmc and indicates the time variation of pole 1 gap withstand voltage during closing, assuming the dielectric strength of the insulation medium to be constant. Curve (ii) indicates the system voltage across pole 1 gap of the circuit-breaker. As the withstand voltage of pole 1 contact gap falls to the level of voltage across the gap, an electrical closure or prestrike occurs at Tec before the contacts mechanically touch. Similar process may occur for poles 2 and 3 of the circuit-breaker. The latter part of curve (i) can be approximated as a straight line and indicated by curve (iii) whose negative slope is defined as S where S = dv/dt = average rate of decay of dielectric strength of the gap during circuit-breaker closing in kV/s = (dielectric strength of the insulation medium in kV/cm) × (relative speed of approach of the contacts at impact in cm/s).

Figure 8.19 Illustration of circuit-breaker electrical closure, or prestrike, and mechanical closure
To derive an expression for the probability density function of the voltage phase angle ϕ, we neglect the voltage polarity effect on the electrical strength of the gap, i.e.![]() . Figure 8.20(a) illustrates the mechanical closing instants and the corresponding range of electrical closing instants or angles for two different slopes S1 and S2 and Figure 8.20(b) shows an expanded section of a small element on the voltage curve.
. Figure 8.20(a) illustrates the mechanical closing instants and the corresponding range of electrical closing instants or angles for two different slopes S1 and S2 and Figure 8.20(b) shows an expanded section of a small element on the voltage curve.
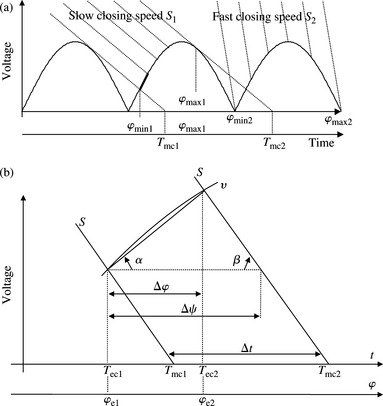
Figure 8.20 Probabilistic analysis of voltage phase angle of circuit-breaker closure onto a fault: (a) range of electrical closing angle due to a circuit-breaker prestrike and (b) an expanded section of a small element on the voltage curve of Figure 8.20(a)
Using Figure 8.20(b), consider two closing curves of the same slope S separated by a small time interval Δt, Tmc1 and Tmc2 are their respective mechanical closing times and Tec1 and Tec2 are their respective electrical closing instants. On the voltage waveform, the electrical phase angles ϕe1 and ϕe2 correspond to the time instants Tec1 and Tec2, respectively. The probability element of electrical closing between ϕe1 and ϕe2 is F(ϕ)δϕ where F(ϕ)δϕ is the probability density function of angle ϕ. The probability element between the mechanical closure instants Tmc1 and Tmc2 is F(t)δt where F(t) is the probability density function of mechanical closure with time t. Therefore, with ϕ and t being two functionally connected stochastic variables, we can write
or
The instant when the circuit-breaker closing order is given is random and is independent of the voltage phase angle ϕ and the breaker closes independently of time. Thus, the mechanical closing instant is uniformly distributed and has a constant probability density F(t) between the minimum and the maximum closing angles of 0 and Π as shown in Figure 8.20(a). Thus,
 (8.27)
(8.27)However, the instant at which electrical closure, or prestrike, occurs is correlated with the voltage across the circuit-breaker contact gap. Thus, the distribution of the electrical closing instant, or angle, will not be uniform. From the geometry of Figure 8.21(b), we have

Figure 8.21 Probability density and distribution of electrical closing angle of a 400 kV circuit-breaker: (a) probability density of electrical closing angles and (b) probability of electrical closing angles
where S is the slope of the closing curve and is negative, tan α is the slope of the source voltage ![]() i.e.
i.e. ![]() .
.
From these relations and Equation (8.28), we obtain
 (8.29)
(8.29)Therefore, using Equations (8.27) and (8.29) in Equation (8.26), we obtain
 (8.30)
(8.30)The probability distribution f(ϕ) of the closing angle being equal to or greater than ϕ is equal to

 (8.31)
(8.31)Besides probabilistic design and operational planning studies, the calculated probability equations may also be used in quantified risk assessments where calculated short-circuit currents may potentially exceed the rating of circuit-breakers. This is discussed in the next section.
For other causes of short-circuit currents, e.g. a lightning strike on top of a tower, then three scenarios may be considered. The first is where the magnitude of the lightning current is so large that the induced tower top voltage will cause back-flashover to the three phases of the circuit irrespective of the actual instantaneous value of the voltage on each phase. This is similar to the simultaneous three-phase short circuit where one of the phases will have an initial dc current component of at least 86.6%. The second scenario is where a substantial lightning strike directly hits one of the phases of the circuit and causes a short circuit. In this case, since the short circuit is effectively independent of the voltage magnitude or phase angle, the probability of the short circuit occurring between voltage zero and voltage peak is uniform. The probability of maximum dc current offset requires a short circuit at or near to voltage zero and if this is assumed to be within 0 ± 10°, then this equates to 40° over a full power frequency cycle of 360°. Therefore, the probability of maximum dc current offset is approximately equal to (40° /360°) × 100 ≈ 11%. The third scenario is where the magnitude of the lightning induced voltage alone is insufficient but together with that of the actual instantaneous value of the voltage on any one phase will cause back-flashover and short circuit. Under this mechanism, the short circuit is more likely to occur when the phase voltage is significantly away from voltage zero. In this case, the probability of maximum dc current offset arising may be assumed to be negligible.
It is noted that the variable S used in Equations (8.30) and (8.31) is an important circuit-breaker parameter for the practical application of point-on-wave closing technique of circuit-breakers. This application is aimed at reducing transient over-voltages such as when energising shunt capacitor banks. To achieve this, the technique aims at closing the three poles at or very close to voltage zero on the source voltage waveform which requires a high value of S. Therefore, a circuit-breaker equipped with point-on-wave closing will produce maximum dc offset in each phase if it were inadvertently closed onto an existing three-phase to earth short-circuit fault. The effect of the parameter S on the probability of closing at various voltage phase angles is illustrated in an example in the next section.
8.6.4 Example
Example 8.1
Derive and plot the probability density and distribution functions of the electrical closing angle for a 400 kV circuit-breaker having eight gaps in series. The power system has a nominal frequency of 50 Hz.
Using Equations (8.30) and (8.31), and above a certain limiting circuit-breaker closing speed, i.e. when |S| ≥ Slimit, ϕmin = 0 and ϕmax = Π. Also, at ϕ = ϕmax = Π, F(ϕ) = 0 and Equation (8.30) gives S = –Slimit = -![]() Thus,
Thus,
For |S| < Slimit, we have F(ϕmax) = 0 giving
Also ϕmin can be determined from

It can be easily shown that for [|S| ≥ Slimit, ϕmin = 0, ϕmax = Π]; [S = -1/2 Slimit, ϕmin = 13.2°, ϕmax = 120°]; [S = -![]() Slimit, ϕmin = 30.5°, ϕmax = 104.47°]; [S =
Slimit, ϕmin = 30.5°, ϕmax = 104.47°]; [S = ![]() Slimit, ϕmin = 45.5°, ϕmax = 97.18°]. The results of the probability functions are shown in Figure 21.8(a) and (b).
Slimit, ϕmin = 45.5°, ϕmax = 97.18°]. The results of the probability functions are shown in Figure 21.8(a) and (b).
At low circuit-breaker closing speed, e.g. S = -![]() Slimit the electrical closing angles are higher and their range is more restricted. Therefore, the assumption of maximum 100% dc current offset is unrealistic. Even the worst case of ϕmin = 45.5° gives an initial dc current magnitude, using Equation (8.27), of 65% (for 45 ms circuit dc time constant) and 68% (for 120 ms circuit dc time constant). However, for modern circuit-breakers with high closing speeds, all closing angles are likely but it is generally more likely that a circuit-breaker will close at smaller angles.
Slimit the electrical closing angles are higher and their range is more restricted. Therefore, the assumption of maximum 100% dc current offset is unrealistic. Even the worst case of ϕmin = 45.5° gives an initial dc current magnitude, using Equation (8.27), of 65% (for 45 ms circuit dc time constant) and 68% (for 120 ms circuit dc time constant). However, for modern circuit-breakers with high closing speeds, all closing angles are likely but it is generally more likely that a circuit-breaker will close at smaller angles.
At |S| ≥ 5Slimit, there is almost equal probability of closing at any angle between 0° and 180°, i.e. the closure instant is independent of the voltage phase angle. In other words, there is equal probability of 100% and zero dc current offset.
8.7 Risk assessment and safety considerations
8.7.1 Background
Short-circuit studies carried out in long-term network design short-term network operational timescales or real time may identify short-circuit duties on existing switchgear in excess of ratings. The condition is usually defined as switchgear that is potentially overstressed. In the unlikely event of switchgear being identified to be potentially permanently overstressed, and in the absence of operational solutions (this is discussed in the next chapter) to remove the condition, it is usual to replace such switchgear with higher rated equipment. In network operational planning timescales, temporary overstressing may be identified such as may occur during switching operations to reconfigure the network. Depending on operating practices, substation configurations and circuit definitions, the duration of such a potential temporary overstressing may extend from a few minutes to possibly an hour.
8.7.2 Relevant UK legislation
When the health and safety of employees and the general public is affected, there may be legal duties which must be observed. With reference to the UK, the relevant legislation can be summarised as follows:
• The Health and Safety at Work Act 1974 (Sections 2 and 3): ‘An employer has a duty to ensure the health and safety of all his employees and to carry on his business in such a way that persons in his employment are not exposed to danger’.
• The Electricity at Work Regulations 1989:
• The Management of Health and Safety at Work Regulations 1999 (Section 3 Risk Assessments): ‘Every employer shall make an assessment of the risks to the health and safety of his employees whilst at work and the risks to persons not in his employment in connection with his undertaking’.
• The Electricity Safety, Quality and Continuity Regulations 2002: Part 1 places general duties on employers to prevent danger so far as is reasonably practicable, and to ensure their equipment is sufficient for the purpose in which it is used.
Breaches of legislation in the UK are criminal offences and can lead to prosecution. Switchgear should not be overstressed if this gives rise to danger but if an employer takes all reasonably practicable steps and exercises all due diligence to avoid danger, a defence can be formed by the implementation of a suitable risk management procedure such as a quantified risk assessment.
8.7.3 Theory of quantified risk assessment
The objectives of quantified risk assessment are to identify the risk of fatality to an individual associated with equipment catastrophic failure and to reduce these individual risks to a level which is As Low As Reasonably Practicable (ALARP). The UK Health and Safety at Work Act 1974 includes the ALARP concept and the Health and Safety Executive have interpreted this concept in a risk diagram as shown in Figure 8.22.

The diagram consists of three regions. The ‘bottom broadly acceptable region’ is where the individual risk is so small that no further measures are necessary. The top ‘unacceptable region’ is where the individual risk is so large that it cannot be tolerated. The middle ‘ALARP region’ is where the individual risk must be ‘As Low As Reasonably Practicable’ considering the benefits of accepting the risk against the costs incurred of any further risk reduction measures. The UK Health and Safety Executive suggests certain numerical levels of risks. A risk of 10−7 or 1 in 10 million per person per year represents negligible risk. A risk level at the lower limit of the ALARP region is 10−6 or 1 in 1 million per person per year. Also, the suggested level of risk at the upper limit of the ALARP region is 10−4 or 1 in 10 000 per person per year for the public and 10−3 or 1 in 1000 per person per year for employees, respectively. The maximum tolerable level of risk to the public, 1 in 10 000 per person per year, is based on the proportion of people killed in road-traffic-related accidents in the UK per year. At the bottom of the ALARP region, the risk may be tolerated if the cost of reducing it would exceed the improvement gained. However, at the top of the ALARP region, the risk must be reduced unless the cost of reduction, which would exceed the improvement gained, is grossly disproportionate to the improvement gained.
8.7.4 Methodology of quantified risk assessment
A quantified risk assessment method consists of two steps: (a) risk analysis and (b) risk evaluation. Risk analysis may use an event tree risk analysis model in order to quantify the risks. This is a method originally devised to assess protective systems reliability and safety in nuclear power plants. Risk analysis consists of the following steps:
(a) Analysis of the site layout and configuration, maximum short-circuit current and critical location of the fault, and identification of potentially overstressed switchgear and its rating, type, age, maintenance record, etc. An estimation of the frequency of short-circuit fault f and proportion of time per year when the plant is subject to potential overstressing P1 are made.
(b) Analysis of the consequences of plant failure on people. Estimates of the probability of catastrophic plant failure P2, the proportion of time the individual is exposed to the hazard P3 and the probability of fatal injury P4.
The individual risk (IR) is estimated as follows:
Risk evaluation consists of comparing the estimated IR against the criteria for risk unacceptability, acceptability and tolerability as described in Section 8.7.3 and shown in Figure 8.22.
[1] Brown H. 2nd edn. Solution of Large Networks by Matrix Methods. John Wiley & Sons; 1985. 0-471-80074-0.
[2] El-Kady M.A. Probabilistic short-circuit analysis by Monte Carlo simulations. IEEE Transactions on PAS. May 1983;Vol. PAS-102(No. 5):1308-1316.
[3] Srivastava K.D., et al. The probabilistic approach to substation bus short-circuit design. Electric Power Systems Research. 1981;Vol. 4(No. 1):191-200.
[4] Ford G.L., et al. An advanced probabilistic short-circuit program. IEEE Transactions, on PAS. May 1983;Vol. PAS-102(No. 5):1240-1248.
[5] Tleis N. Computation of multiple prestriking transients in three-phase cable-motor systems. PhD Thesis. England, UK: The University of Manchester; November 1989.
[6] Svensen O.H. The influence of prestrike on the peak values of energisation transients. IEEE Transactions on PAS. March/April 1976;Vol. PAS-95(No. 2):711-719.
[7] Fukuda, S., et al., “Switching surge reduction with circuit-breaker resistors in extra-high voltage systems’, CIGRE, Session 1970, August/September, 13-04.