
98 Submanifolds and Holonomy
3.6.9), which span the first normal space by Exercise 3.6.11. Then n
1
and n
2
are
linearly independent and locally there exists a parallel unit normal vector field
ξ
such that n
1
,
ξ
= n
2
,
ξ
. Therefore A
ξ
is a constant multiple of the identity, that
is,
ξ
is an umbilical section of
ν
M.ThenM contained in a sphere and so it is an
isoparametric hypersurface of a sphere with two distinct principal curvatures. Each
one-dimensional eigendistribution E
1
,E
2
of the shape operator of M,regardedasa
hypersurface of the sphere, is an autoparallel distribution. In fact, this follows from
(2.14) in the proof of Theorem 2.9.4. Then E
1
and E
2
= E
⊥
1
are autoparallel, which
implies that E
1
and E
2
are parallel distributions. Moreover,
α
(E
1
,E
2
)=0, where
α
is the second fundamental form of M as a submanifold of the Euclidean space. Then
we can apply Lemma 1.7.1 to conclude that M is an extrinsic product of circles.
If Φ
∗
= SO
2
,thenΦ
∗
p
is transitive on the unit sphere in
ν
p
M for all p ∈ M.
This implies that there exist constants
¯
H
k
such that H
k
(
ξ
)=
¯
H
k
, k = 1,2, for all unit
vectors
ξ
∈
ν
p
M. In particular,
¯
H
1
= H
1
(
ξ
)=H,
ξ
= 0for
ξ
orthogonal to H.
Thus H = 0, that is, M is a minimal submanifold. Moreover, as a ref ormulation of
the condition on H
2
, for any normal vectors
ξ
and
η
we have A
ξ
,A
η
= tr(A
ξ
A
η
)=
μ
2
ξ
,
η
for some
μ
≥0. Now, either M is totally geodesic or
μ
> 0. In the latter case
each shape operator A
ξ
with respect to a unit normal vector field
ξ
has two distinct
eigenvalues ±
μ
. We can then choose local orthonormal frame fields e
1
,e
2
of TM and
ξ
1
,
ξ
2
of
ν
M such that A
ξ
1
is represented by the matrix
μ
0
0 −
μ
. Suppose that A
ξ
2
is represented by the matrix
bd
d −b
.SinceA
ξ
1
,A
ξ
2
= 0wegetb = 0, and since
A
ξ
1
,A
ξ
1
= A
ξ
2
,A
ξ
2
we get d = ±
μ
. Without loss of generality we may assume
that d =
μ
,sothatA
ξ
2
has the form
0
μ
μ
0
. In particular, from the equations of
Gauss and Ricci we get that the sectional curvature K of M is equal to K =
κ
−2
μ
2
,
while the normal curvature K
⊥
= R
⊥
(e
1
,e
2
)
ξ
1
,
ξ
2
satisfies K
⊥
= 2
μ
2
. Next, using
the Codazzi equation we see that 0 = Δlog
μ
= 2K −K
⊥
,whereΔ is the L aplace-
Beltrami operator on M acting o n functions by
Δ f =
∑
i
∇
2
e
i
e
i
f =
∑
i
d
2
f (e
i
,e
i
) −
∑
i
df(∇
e
i
e
i
)
(this is left as an exercise, cf. also [83, formula 3.5]). So 2
μ
2
= 2
κ
−4
μ
2
,thatis,
κ
=
3
μ
2
> 0. Hence M has the same second fundamental form as the Veronese surface
S
2
(
κ
/
√
3) → S
4
(
κ
) (cf. Section 2.4). We now apply Theorem 2.10.2, which shows
that M coincides locally with the Veronese surface S
2
(
κ
√
3
) ⊂ S
4
(
κ
).
The case k = 3.
If M is minimal, then the first normal space has dimension two, namely the d im-
ension of the space of traceless 2 ×2-symmetric matrices. By assumption it must be
equal to the codimension. It follows that M cannot be a minimal submanifold. More-
over,
ξ
1
=
H
H
is a global parallel unit normal vector field o n M and A
ξ
1
commutes
with all shape operators by the Ricci equation. If A
ξ
1
has two distinct eigenvalues,
then all shape operators are simultaneously diagonalizable and M is isoparametric,
The Normal Holonomy Theorem 99
since it has flat normal bundle. This is a contradiction, since the number of distinct
principal curvatures must be bigger or equal than the dimension of the first normal
space (see Exercise 3.6.12). So A
ξ
1
is a constant multiple of the identity, that is, M
is pseudoumbilical. By Theorem 1.6.3, M is a minimal submanifold o f some extrin-
sic sphere
¯
M
4
(
κ
+ H
2
) in
¯
M
5
(
κ
) and M →
¯
M
4
(
κ
+ H
2
) has constant principal
curvatures. This reduces the problem to the previous case.
Altogether we have now proved (see, e.g., [302, Theorem 3 and Corollary 3]):
Theorem 3.1.4 Let M be a full surface with constant principal curvatures in a stan-
dard space form
¯
M
2+k
(
κ
).Thenk≤3, M has parallel second fundamental form and
M is locally one of the following surfaces:
(i) an isoparametric surface in
¯
M
3
(
κ
) (
κ
≥
κ
) that is either totally umbilical or
locally an extrinsic product of two one-dimensional totally umbilical subman-
ifolds with parallel mean curvature vector field;
(ii) the Veronese surface in a 4-sphere or the composition of the Veronese surface
with a totally umbilical embedding of the 4-sphere into
¯
M
5
(
κ
).
3.1.4 s-representations and constant principal curvatures
We already proved in Section 2.7 that every principal orbit of an s-representation
is isopa rametric. We now prove that, more generally, every orb it of an s-
representation is a submanifold with constant principal curvatures.
Let (G,K) be a Riemannian symmetric pair of noncompact type, g = k ⊕p be the
corresponding Cartan decomposition of g,and(·,·) the usual Ad(K)-invariant inner
product on g that is induced fro m the Killing form and the Cartan involutio n of g .
Let 0 = X ∈ p and M = Ad(K)·X be the corresponding adjoint orbit, which is a real
flag manifold. The isotropy algebra at X is
k
X
= Z
k
(X)={Y ∈ k : [X,Y ]=0}.
Let m be the orthogonal complement of k
X
in k with respect to (·,·).Thenk = k
X
⊕m
is a r eductive decomposition of k. Recall that the tangent and normal space of M at
X are given by
T
X
M = ad(X)m = {[X,Y ] : Y ∈ m} ,
ν
X
M = Z
p
(X)={
ξ
∈ p : [X,
ξ
]=0}.
Lemma 3.1.5 We have [m,
ν
X
M] ⊂ T
X
M.
Proof For Y ∈ m and
ξ
,
ζ
∈
ν
X
M we have [Y,
ξ
] ∈p and ([Y,
ξ
],
ζ
)=(Y,[
ζ
,
ξ
]).The
Jacobi identity implies [[
ζ
,
ξ
],X]=[[X,
ξ
],
ζ
] −[[X,
ζ
],
ξ
]=0. Thus [
ξ
,
ζ
] ∈ k
X
,and
hence ([Y,
ξ
],
ζ
)=(Y,[
ζ
,
ξ
]) = 0, which implies [Y,
ξ
] ∈ T
X
M.
Let
γ
be a piecewise differentiable curve in M with
γ
(0)=X. There exists a
unique piecewise differentiable curve k(t) ∈ K such that k(0)=e, k
−1
(t)
˙
k(t) ∈ m
100 Submanifolds and Holonomy
and
γ
(t)=Ad(k(t))X . Then the normal vector field
ˆ
ξ
(t)=Ad(k(t))
ξ
,
ξ
∈
ν
X
M,
satisfies
d
dt
ˆ
ξ
(t)=
d
dt
Ad(k(t))
ξ
= Ad(k(t))[k
−1
(t)
˙
k (t),
ξ
] ∈ Ad(k(t))[m,
ν
X
M],
which is contained in Ad(k(t))T
X
M = T
γ
(t )
M by Lemma 3.1.5. This shows that
ˆ
ξ
is
the ∇
⊥
-parallel transport of
ξ
along
γ
. Since the shape operators A
ξ
and A
Ad(k(t))
ξ
are conjugate to each other, it follows that the principal curvatures of M with respect
to
ˆ
ξ
are constant along
γ
. Thus, we have proved
Proposition 3.1.6 Every orbit of an s-representation is a submanifold with constant
principal curvatures.
3.1.5 The normal holonomy of an orbit of an s-representation
It is well-known that the holonomy representation of an irreducible Riemannian
symmetric space coincides with the isotropy representation (see Section A.1). We
now discuss an analogue for submanifold geometry that involves the orbits of s-
representations and is due to Heintze and Olmos [146].
Theorem 3.1.7 Let
¯
M = G/K be a Riemannian symmetric space of noncompact
type with G = I
o
(
¯
M),K= G
o
and o ∈
¯
M . Consider 0 = X ∈ T
o
¯
M and the orbit
M = Ad(K) ·X ⊂ T
o
¯
M of the isotropy representation of G/K. Assume that M is full.
Then the normal holonomy representation of M at X is equal to the effectivized slice
representation of X, that is, the effectivized action of the isotropy group K
X
on the
normal space
ν
X
M.
Proof In Section 5.2, page 189, we will give an alternative proof using a descrip-
tion of the normal holonomy of orbits in terms of projection of Killing vector fields
(Theorem 5.2.7) and Lemma 3.1.5, which implies tha t normal Killing vector fields
induced by elements in the orthogonal complement of the isotropy algebra vanish.
Here we give the same proof as in [146] and we use the restricted root space
decomposition associated with the symmetric space
¯
M = G/K, using the notation of
Section 2.3. Note that K is connected since
¯
M = G/K is simply connected and G =
I
o
(
¯
M) is connected. Let g = k ⊕p be the Cartan decomposition of g. Recall that we
identify T
o
¯
M with p and the isotropy representation with the adjoint representation
Ad : K → SO(p).Themap f : K/K
X
→ M , kK
X
→ Ad(k)X is a diffeomorphism.
In Section 2.3 we related tangent and normal spaces of M to the restricted root
space decomposition with respect to a maximal abelian subspace of p containing X.
The tangent and normal spaces of M are respectively given by
T
X
M = p
+
=
∑
α
∈Ψ
+
p
α
= ad(X)k
+
=[X,k
+
],
ν
X
M = p
X
= Z
p
(X)={Y ∈ p : [X ,Y ]=0}.
The Normal Holonomy Theorem 101
An important observation now is that M = K/K
X
can be endowed with the normal
homogeneous metric induced by the negative of the Killing form of g restricted to k.
Since this metric is naturally reductive, the curves in M determined by one-parameter
subgroups, that is, the curves
c(t)= f ((kExp(tU))K
X
)=Ad(kExp(tU ))X , U ∈ k
+
,
are g eodesics in M. In general, however, this normal homogeneous metric on K/K
X
does not coincide (even up to a constant factor) with the induced metric on the im-
mersed submanifold M. This actually happens if and only if M is a symmetric sub-
manifold of p (see [263, Proposition 2.7]).
Next, we consider the ideal I spanned by k
+
, which coincides with k
+
+[k
+
,k
+
]
(exercise). We shall need the following lem ma that combines algebraic properties of
the above decomposition with the geometric assumption that M is full in R
n
∼
=
p.
Lemma 3.1.8 The ideal I spanned by k
+
is equal to k.
Proof Let I
⊥
be the orthogonally complementary ideal of I in k (here k is compact).
From the Jacobi identity we get [I
⊥
,T
X
M]=[I
⊥
,[X, k
+
]] = 0since[I
⊥
,k
+
]=0
and I
⊥
⊂ k
X
(so [I
⊥
,X]=0). This implies that for any t ∈ R and U ∈ I
⊥
,
Ad(Exp(tU)) is an isometry of M = Ad(K) ·X such that Ad (Exp(tU))X = X and
d
X
Ad(Exp(tU)) = id
T
X
M
. Thus Ad(Exp(tU)) is the identity on M. Since th e fixed
points of Ad(Exp(tU)) in p form a linear subspace and M is full (and contained in
a sphere), it follows that Ad(Exp(tU)) is the identity on p for each t. Then, since
(G,K) is effective, Exp(tU)=e and U = 0.
The parallel transport in the normal bundle of M along the geodesics of K/K
X
given by c(t)=Ad(kExp(tU ))X is determined by the action of the corresponding
one-parameter subgroup. Explicitly, for any
ξ
∈ p
X
=
ν
X
M and U ∈ k
+
the vector
field
ξ
(t)=Ad(kExp(tU))
ξ
is ∇
⊥
-parallel along c(t). This can be seen using the
same arguments as in the p roof of Proposition 3.1.6. So parallel transport along any
broken geodesic is given by the differential of the action at some point in K.Any
broken geodesic in K/K
x
starting at eK
X
can be written as
Exp(u
1
)...Exp(u
i−1
)Exp((t −t
i−1
)U
i
)K
X
, t ∈ [t
i−1
,t
i
] , i = 1,...,r,
where U
i
∈ k
+
and u
i
=(t
i
−t
i−1
)U
i
.Then
I = {Exp(u
1
)...Exp(u
r
) : r ∈ N,u
i
∈ k
+
}
is a Lie subgroup of K, since it is arcwise connected. Moreover, the Lie algebra of I
coincides with I (exercise). By Lemma 3.1.8 we get I = K, since both I and K are
connected. Since any curve in M can be approximated by broken geodesics in M (and
K
X
is closed), it follows that K
X
acts o n
ν
X
M as the normal holonomy group.
102 Submanifolds and Holonomy
3.1.6 Normal holonomy and normal curvature tensor
An important fact about holonomy groups is that the holonomy algebra is related
to the curvature tensor. We briefly discuss this fact for the normal holonomy group,
but everything in this paragraph holds in full generality for the holonomy of any
metric connection on a vector bundle.
Example 3.1.1 We first examine a special case to g et a feeling for this relation. Sup-
pose that the normal bundle is flat, that is, R
⊥
= 0. Then it is not hard to show that any
normal vector has the same ∇
⊥
-parallel transport along homotopic curves with fixed
endpoints. This clearly implies that if R
⊥
= 0, then the restricted normal holonomy
group is trivial, or equivalently, that the normal holonomy algebra L (Φ
p
) is trivial.
Thus the normal curvature tensor can be regarded as an obstruction for the restricted
holonomy group to be trivial.
To see this m ore p recisely, let us consider homotopic p aths
γ
0
and
γ
1
, both starting
at p and ending at q. Suppose H(t,s)=
γ
s
(t) is a p iecewise smooth homotopy. Fix
s, take a normal vector
ξ
∈
ν
p
M,andlett →
ξ
t,s
be its ∇
⊥
-parallel transport along
γ
s
. We will show that
ξ
1,s
does not depend on s.Since
ξ
t,s
is ∇
⊥
-parallel alo ng
γ
s
,
D
⊥
∂
t
ξ
t,s
= 0and
D
⊥
ds
ξ
0,s
= 0, because
ξ
0,s
=
ξ
. Thus
D
⊥
∂
s
D
⊥
∂
t
ξ
t,s
= 0, and since R
⊥
= 0
this yields
D
⊥
∂
t
D
⊥
∂
s
ξ
t,s
= 0. So
D
⊥
∂
s
ξ
t,s
is ∇
⊥
-parallel along
γ
s
. Now , the value at t = 0
of the parallel vector field
D
⊥
∂
s
ξ
t,s
is
D
⊥
ds
ξ
0,s
=
d
ds
ξ
= 0. Thus
D
⊥
∂
s
ξ
t,s
= 0. In particular
ξ
1,s
is constant (observe that
D
⊥
ds
ξ
1,s
=
d
ds
ξ
1,s
).
In general, one can show that the normal curvature tensor endomorphisms always
belong to the normal holonomy algebra (see [42, 10.52, p. 290]). This can be seen
as a consequence of the following simple formula relating the curvature tensor with
parallel transport. Let u, v ∈ T
p
M,
ξ
∈
ν
p
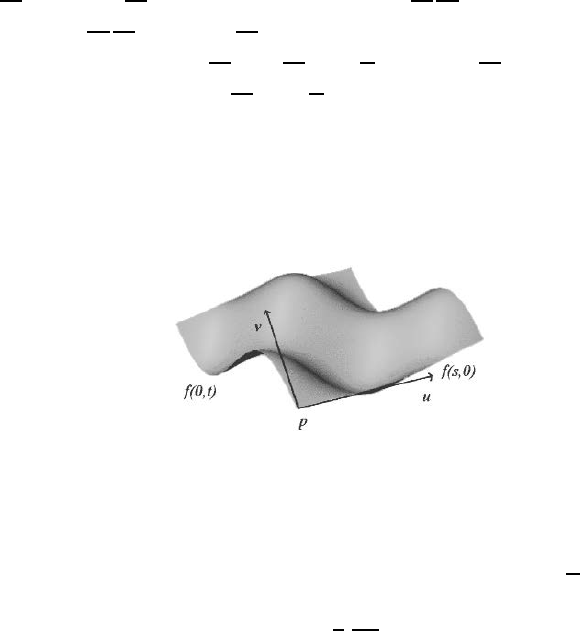
M. Construct a parametrized surface f (s,t)
on M such that f (0,0)=p, f
s
(0,0)=u and f
t
(0,0)=v (see Figure 3.1).
FIGURE 3. 1: A parametrized surface f (s,t) on M.
We now move along coordinate lines from f (0,0) to f (t,0),thento f (t,t),then
back to f (0,t) and finally to f (0, 0) again. In this way we get a loop
γ
t
.Let
τ
⊥
γ
t
ξ
be the
∇
⊥
-parallel displacement of
ξ
along this loop. Then, by Exercise 3.6.2,
d
dt
t=0
τ
⊥
γ
t
ξ
=
0and
R
⊥
(u,v)
ξ
= −
1
2
d
2
dt
2
t=0
τ
⊥
γ
t
ξ
.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.