
In order to extract a meaningful amount of information from the images, we need to make sure our feature extractor extracts features from all the parts of a given image. Consider the following image:

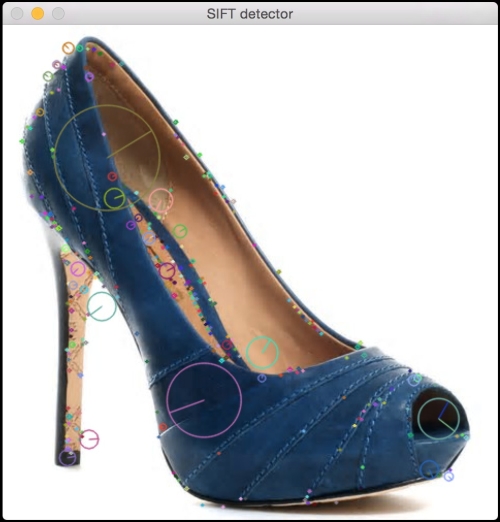
If you extract features using a feature extractor, it will look like this:
If you use Dense detector, it will look like this:

We can control the density as well. Let's make it sparse:

By doing this, we can make sure that every single part in the image is processed. Here is the code to do it:
import cv2
import numpy as np
class DenseDetector(object):
def __init__(self, step_size=20, feature_scale=40, img_bound=20):
# Create a dense feature detector
self.detector = cv2.FeatureDetector_create("Dense")
# Initialize it with all the required parameters
self.detector.setInt("initXyStep", step_size)
self.detector.setInt("initFeatureScale", feature_scale)
self.detector.setInt("initImgBound", img_bound)
def detect(self, img):
# Run feature detector on the input image
return self.detector.detect(img)
if __name__=='__main__':
input_image = cv2.imread(sys.argv[1])
input_image_sift = np.copy(input_image)
# Convert to grayscale
gray_image = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
keypoints = DenseDetector(20,20,5).detect(input_image)
# Draw keypoints on top of the input image
input_image = cv2.drawKeypoints(input_image, keypoints,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# Display the output image
cv2.imshow('Dense feature detector', input_image)
# Initialize SIFT object
sift = cv2.SIFT()
# Detect keypoints using SIFT
keypoints = sift.detect(gray_image, None)
# Draw SIFT keypoints on the input image
input_image_sift = cv2.drawKeypoints(input_image_sift,
keypoints, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# Display the output image
cv2.imshow('SIFT detector', input_image_sift)
# Wait until user presses a key
cv2.waitKey()This gives us close control over the amount of information that gets extracted. When we use a SIFT detector, some parts of the image are neglected. This works well when we are dealing with the detection of prominent features, but when we are building an object recognizer, we need to evaluate all parts of the image. Hence, we use a dense detector and then extract features from those keypoints.