
Interaction of Harmonics with Capacitors
Abstract
Investigates interaction of harmonics with capacitors. First the main applications of capacitors in power systems are outlined: power factor correction, definitions of displacement power factor and total power factor which includes harmonics. Thereafter, the power quality issues associated with capacitors are discussed, including series and parallel harmonic resonances, and transients due to capacitor switching. Frequency and capacitance scanning techniques including harmonic voltage, current and reactive-power constraints for capacitors are addressed next. Feasible exemplary operating regions for safe operation of capacitors in the presence of voltage, current and reactive-power harmonic components are investigated. Equivalent circuits of capacitors in terms of inductance, resistance, and capacitance are reviewed. 9 application examples with solutions and 10 application-oriented problems are listed.
Capacitors are extensively used in power systems for voltage control, power-factor correction, filtering, and reactive power compensation. With the proliferation of nonlinear loads and the propagation of harmonics, the possibility of parallel/series resonances between system and capacitors at harmonic frequencies has become a concern for many power system engineers.
Since the 1990s, there has been an increase of nonlinear loads, devices, and control equipment in electric power systems, including electronic loads fed by residential and commercial feeders, adjustable-speed drives and arc furnaces in industrial networks, as well as the newly developing distributed generation (DG) sources in transmission and distribution systems. This has led to a growing presence of harmonic disturbances and has deteriorated the quality of electric power. Moreover, some nonlinear loads and power electronic control equipment tend to operate at relatively low power factors, causing poor voltage regulation, increasing line losses, and forcing power plants to supply more apparent/reactive power. The conventional and practical procedure for overcoming these problems, as well as compensating reactive power, are to install (fixed and/or switching) shunt capacitor banks on either the customer or the utility side of a power system. Capacitor banks are also used in power systems as reactive power compensators and tuned filters. Recent applications are power system stabilizers (PSS), flexible AC transmission systems (FACTS), and custom power devices, as well as high-voltage DC (HVDC) systems.
Misapplications of power capacitors in today’s modern and complicated industrial distribution systems could have negative impacts on both the customers (sensitive linear and nonlinear loads) and the utility (equipment), including these:
• amplification and propagation of harmonics resulting in equipment overheating, as well as failures of capacitor banks themselves,
• harmonic parallel resonances (between installed capacitors and system inductance) close to the frequencies of nearby harmonic sources,
• unbalanced system conditions which may cause maloperation of (ground) relays, and
• additional power quality problems such as capacitor in-rush currents and transient overvoltages due to capacitor-switching actions.
Capacitor or frequency scanning is usually the first step in harmonic analysis for studying the impact of capacitors on system response at fundamental and harmonic frequencies. Problems with harmonics often show up at capacitor banks first, resulting in fuse blowing and/or capacitor failure. The main reason is that capacitors form either series or parallel resonant circuits, which magnify and distort their currents and voltages. There are a number of solutions to capacitor related problems:
• altering the system frequency response by changing capacitor sizes and/or locations,
• altering source characteristics, and
• designing harmonic filters.
The last technique is probably the most effective one, because properly tuned filters can maintain the primary objective of capacitor application (e.g., power-factor correction, voltage control, and reactive power compensation) at the fundamental frequency, as well as low impedance paths at dominant harmonics.
This chapter starts with the main applications of capacitors in power systems and continues by introducing some power quality issues associated with capacitors. A section is provided for capacitor and frequency scanning techniques. Feasible operating regions for safe operation of capacitors in the presence of voltage and current harmonics are presented. The last section of this chapter discusses equivalent circuits of capacitors.
5.1 Application of capacitors to power-factor correction
The application of capacitor banks in transmission and distribution systems has long been accepted as a necessary step in the design of utility power systems. Design considerations often include traditional factors such as voltage and reactive power (VAr) control, power-factor correction, and released capacity. More recent applications concern passive and active filtering, as well as parallel and series (active and reactive) power compensation. Capacitors are also incorporated in many PSS, FACTS, and custom power devices, as well as HVDC systems.
An important application of capacitors in power systems is for power-factor correction. Poor power factor has many disadvantages:
• degraded efficiency of distribution power systems,
• decreased capacity of transmission, substation, and distribution systems,
• poor voltage regulation, and
• increased system losses.
Many utility companies reward customers who improve their power factor (PF) and penalize those who do not meet the prescribed PF requirements. There are a number of approaches for power factor improvement:
• synchronous condensers (e.g., overexcited synchronous machines with leading power factor) are used in transmission systems to provide stepless (continuous) reactive power compensation for optimum transmission line performance under changing load conditions. This technique is mostly recommended when a large load (e.g., a drive) is added to the system;
• shunt-connected capacitor banks are used for stepwise (discrete) full or partial compensation of system inductive power demands [1,2]; and
• static VAr compensators and power converter-based reactive power compensation systems are employed for active power-factor correction (PFC). These configurations use power electronic switching devices to implement variable capacitive or inductive impedances for optimal power-factor correction. Many PFC configurations have been proposed [3–5] for residential and commercial loads, including passive, single-stage, and double-stage topologies for low (below 300 W), medium (300–600 W) and high (above 600 W) power ratings, respectively.
The capacitor-bank approach is most widely used owing to its low installation cost and large capacity [2]. Active power-factor circuits are relied on for relatively small power rating applications and are not a subject of this chapter.
5.1.1 Definition of Displacement Power Factor
Displacement power factor (DPF) is the ratio of the active or real fundamental power P (measured in W or kW) to the fundamental apparent power S (measured in VA or kVA). The reactive power Q (measured in VAr or kVAr) supplied to inductive devices is the phasor difference between the real and apparent powers. The DPF is the cosine of the angle between these two quantities. It reflects how efficiently a facility uses electricity by comparing the amount of useful work that is extracted from the electrical apparent power supplied. Of course, there are many other measures of energy efficiency. The relationship between S, P, and Q is defined by the power triangle of Fig. 5.1.

The DPF, determined from φ = tan− 1(Q/P), measures the displacement angle between the fundamental components of the phase voltage and phase current:
The DPF varies between zero and one. A value of zero means that all power is supplied as reactive power and no useful work is accomplished. Unity DPF means that all of the power consumed by a facility goes to produce useful work, such as resistive heating and incandescent lighting.
Electric power systems usually experience lagging DPFs – based on the consumer notation of current – because a significant part consists of reactive devices that employ coils and requires reactive power to energize their magnetic circuits. Generally, motors that are operated at or near full nameplate ratings will have high DPFs (e.g., 0.90 to 0.95) whereas the same motor under no-load and/or light load conditions may exhibit a DPF in the range of 0.30. For example, motors in large hydraulic machines such as plastic molding machines mostly operate under lightly loaded conditions, contributing to an overall power factor of about 0.60.
The reactive power absorbed by electrical equipment such as transformers, electric motors, welding units, and static converters increases the currents of generators, transmission lines, utility transformers, switchgear, and cables. Electric utility companies must supply the entire apparent power demand. Because a customer only extracts useful work from the real power component, a high DPF is important. Therefore, in most power systems lagging (underexcited) DPFs (larger than 0.8) are acceptable, and leading (overexcited) power factors should be avoided because they may cause resonance conditions within the power system.
Inductive loads with low DPFs require the generators and transmission or distribution systems to supply reactive current with the associated power losses and increased voltage drops. If a shunt capacitor bank is connected across the load, its (capacitive) reactive current component IC can cancel the load (inductive) reactive current component IL. If the bank is sufficiently large (e.g., IC = IL), it will supply all reactive power, and there will be no reactive current flow entering the power system as is indicated in Fig. 5.2.

The DPF can be measured either by a direct-reading cosφ meter indicating an instantaneous value or by a recording VAr meter, which allows recording of current, voltage, and power factor over time. Readings taken over an extended period of time (e.g., seconds, minutes) provide a useful means of estimating an average value of power factor for an installation.
5.1.2 Total Power Factor (TPF) in the Presence of Harmonics
Equations 5-1 and 5-2 assume that system loads have linear voltage–current characteristics and harmonic distortions are not significant. Harmonic voltage and current distortions will change the expression for the total apparent power and the total power factor (TPF). Consider a voltage v(t) and a current i(t) expressed in terms of their rms harmonic components:


The active (real, average) and reactive powers are given by


and the apparent (voltampere) power is

Therefore, for nonsinusoidal cases, Eq. 5-1 does not hold and must be replaced by
where D is called the distortion power.
According to Eq. 5–5, the TPF is lower than the DPF (Eq. 5–2) in the presence of harmonic distortion of nonlinear devices such as solid-state or switched power supplies, variable-speed AC drives, and DC drives. Harmonic distortion essentially converts a portion of the useful energy into high-frequency energy that is no longer useful to most devices and is ultimately lost as heat. In this way, harmonic distortion further reduces the power factor. In the presence of harmonics, the total power factor is defined as

where Ptotal and Stotal are defined in Eq. 5–4. Since capacitors only provide reactive power at the fundamental frequency, they cannot correct the power factor in the presence of harmonics. In fact, improper capacitor sizing and placements can decrease the power factor by generating harmonic resonances, which increase the harmonic content of system voltage and current. DPF = cosφ (with φ = tan− 1(Q/P)) is always greater than TPF = cosθ (with θ = cos− 1(PtotaL/Stotal)) when harmonics are present. The DPF is still very important to most industrial customers because utility billing with respect to power factor is almost universally based on the displacement power factor.
5.1.2.1 Application Example 5.1: Computation of Displacement Power Factor (DPF) and Total Power Factor (TPF)
Strong power systems have very small system impedances (e.g., Rsyst = 0.001 Ω, and Xsyst = 0.005 Ω) whereas weak power systems have fairly large system impedances (e.g., Rsyst = 0.1 Ω, and Xsyst = 0.5 Ω). Power quality problems are mostly associated with weak systems. Unfortunately, distributed generation (DG) inherently leads to weak systems because the source impedances of small generators are large, that is, they cannot supply a large current (ideally infinitely large) during transient operation. This application example studies the power-factor correction for a relatively weak power system where the difference between the DPF and the TPF is large due to the relatively large amplitudes of voltage and current harmonics.
a) Perform a PSpice analysis for the circuit of Fig. E5.1.1, where a three-phase thyristor rectifier – fed by a Y/Y transformer with turns ratio (Np/Ns = 1) – via a filter (e.g., capacitor Cf) serves a load (Rload). You may assume Rsyst = 0.05 Ω, Xsyst = 0.1 Ω, f = 60 Hz, vAN(t) = ![]() ·346 V cosωt, vBN(t) =
·346 V cosωt, vBN(t) = ![]() ·346 V cos(ωt – 120°), and vCN (t) =
·346 V cos(ωt – 120°), and vCN (t) = ![]() ·346 V cos(ωt – 240°). Thyristors T1 to T6 can be modeled by metal-oxide-semiconductor field-effect transistors (MOSFETs) in series with diodes, Cf = 500 μF, Rload = 10 Ω, and a firing angle of α = 0°. Plot one period of the voltage and current after steady state has been reached as requested in parts b and c.
·346 V cos(ωt – 240°). Thyristors T1 to T6 can be modeled by metal-oxide-semiconductor field-effect transistors (MOSFETs) in series with diodes, Cf = 500 μF, Rload = 10 Ω, and a firing angle of α = 0°. Plot one period of the voltage and current after steady state has been reached as requested in parts b and c.

b) Plot and subject the line-to-neutral voltage van(t) to a Fourier analysis.
c) Plot and subject the phase current ia(t) to a Fourier analysis.
d) Repeat parts a to c for α = 10°, 20°, 30°, 40°, 50°, 60°, 70°, and 80°.
e) Calculate the DPF and the TPF based on the phase shifts of the fundamental and harmonics between van(t) and ia(t) for all firing angles and plot the DPF and TPF as a function of the firing angle α.
f) Determine the capacitance (per phase) Cbank of the power-factor correction capacitor bank such that the DPF as seen by the power system is for α = 60° about equal to DPF = 0.90 lagging.
g) Explain why the TPF cannot be significantly increased by the capacitor bank. Would the replacement of the capacitor bank by a three-phase tuned (Rfbank, Lfbank, and Cfbank) filter be a solution to this problem?
Solution to Application Example 5.1
a) The PSpice code for the circuit of Fig. E5.1.1 is given in Table E5.1.1
Table E5.1.1
The PSpice code for the circuit of Fig. E5.1.1
| * Computation of displacement power factor * (DPF) and total power factor (TPF) for alpha = 0 * degrees Transformer need not be modeled VAN 2p 1p SIN(0 V 489.3 V 60Hz 0 0 0) VBN 3p 1p SIN(0 V 489.3 V 60Hz 0 0 −120) VCN 4p 1p SIN(0 V 489.3 V 60Hz 0 0 −240) Rgnd 1p 0 1u Rsysa 2p 5p 0.05 Rsysb 3p 6p 0.05 Rsysc 4p 7p 0.05 Lsysa 5p 1 265u Lsysb 6p 2 265u Lsysc 7p 3 265u D1a 5 1 D1N4001 D1b 5 6 D1N4001 M1 1 7 5 5 SMM R1 6 23 1u V1 7 5 PULSE(0 40V 2.7778ms 0 0 10.4167ms 16.66667ms) D2a 8 24 D1N4001 D2b 8 9 D1N4001 M2 24 10 8 8 SMM R2 9 3 1u V2 10 8 PULSE(0 40V 5.5556ms 0 0 10.4167ms 16.66667ms) D3a 11 2 D1N4001 D3b 11 12 D1N4001 M3 2 13 11 11 SMM R3 12 23 1u V3 13 11 PULSE(0 40V 8.3333ms 0 0 10.4167ms 16.66667ms) D4a 14 24 D1N4001 D4b 14 15 D1N4001 M4 24 16 14 14 SMM R4 15 1 1u V4 16 14 PULSE(0 40V 11.1111ms 0 0 10.4167ms 16.66667ms D5a 17 3 D1N4001 D5b 17 18 D1N4001 M5 3 19 17 17 SMM R5 18 23 1u V5 19 17 PULSE(0 40V 13.8888ms 0 0 10.4167ms 16.66667ms) D6a 20 24 D1N4001 D6b 20 21 D1N4001 M6 24 22 20 20 SMM R6 21 2 1u V6 2 20 PULSE(0 40V 0ms 0 0 10.4167ms 16.66667ms) Cf 23 24 500u Rload 23 24 10 Rgnd2 24 0 1Meg .model SMM NMOS(Level = 3 Gamma = 0 + Delta = 0 Eta = 0 Theta = 0 Kappa = 0 Vmax = 0 Xj = 0 + Tox = 100n Uo = 600 Phi = 0.6 Rs = 42.69 m + Kp = 20.87u L = 2u W = 2.9 Vto = 3.487 + Rd = 0.19 Cbd = 200n Pb = 0.8 Mj = 0.5 + Cgso = 3.5n Cgdo = 100p Rg = 1.2 Is = 10f) .model D1N4001 D(Is = 1e–12) *.options list node opts .options abstol = 0.01 chgtol = 0.01 + reltol = 0.1 vntol = 100 m trtol = 20 .options itl1 = 500 itl2 = 500 itl4 = 100 + itl5 = 0 .tran 0.1u 60 ms 26 ms 1u UIC .four 60Hz V(1) I(Lsysa) .probe .end |

b) For parts b to d, Figs. E5.1.2 to E5.1.4 show the line to neutral (phase) voltage van(t) and the phase current ia(t) for α = 10°, 40°, and 80°, respectively. Table E5.1.2 lists the Fourier coefficients (magnitude and phase angles) for the phase voltage van(t) and phase current ia(t) as a function of α.



Table E5.1.2
Fourier components of van(t) and ia(t) for the firing angles α = 10°, 40 °, and 80 °
| α = 10° | vanh [V] | ∠vanh [°] | iah [A] | ∠ iah[°] |
| h = 1 | 482.5 | − 144.6 | 75.9 | − 170.5 |
| h = 5 | 30.52 | − 47.91 | 60.76 | 47.8 |
| h = 7 | 33.62 | − 153.5 | 47.93 | − 112.4 |
| α = 40° | vanh [V] | iah [A] | ||
| h = 1 | 483.8 | − 144.1 | 49.86 | 163.1 |
| h = 5 | 21.92 | 179.9 | 43.64 | − 84.45 |
| h = 7 | 26.63 | − 32.15 | 37.98 | 61.99 |
| α = 80° | vanh [V] | iah [A] | ||
| h = 1 | 488.8 | − 144.0 | 4.666 | 129.8 |
| h = 5 | 2.274 | 12.87 | 4.537 | 109 |
| h = 7 | 3.097 | 94.55 | 4.403 | − 171.4 |

c) Table E5.1.3 gives a summary of the DPF and TPF and their ratio (TPF/DPF) as a function of the firing angle α, Fig. E5.1.5 shows the DPF and TPF as a function of α, and Figure E5.1.5 shows that the DPF as a function of the firing angle α obeys the relation cosφ = 0.955 cosα [14]. Figure E5.1.6 illustrates the ratio (TPF/DPF) as a function of the firing angle α.
Table E5.1.3
Displacement power factor (DPF), total power factor (TPF), and their ratio TPF/DPF
| α [°] | DPF [pu] | TPF [pu] | TPF/DPF [pu] |
| 0 | 0.9537 | 0.6831 | 0.7162 |
| 10 | 0.8996 | 0.6214 | 0.6908 |
| 20 | 0.8211 | 0.5518 | 0.6720 |
| 30 | 0.7230 | 0.4749 | 0.6569 |
| 40 | 0.6046 | 0.3892 | 0.6437 |
| 50 | 0.4726 | 0.2982 | 0.6311 |
| 60 | 0.3338 | 0.2064 | 0.6183 |
| 70 | 0.1942 | 0.1173 | 0.6038 |
| 80 | 0.0663 | 0.0388 | 0.5857 |



d) By introducing the capacitor bank into the above PSpice program and performing a series of runs for capacitor bank capacitance values Cbank from 400 to 10 μF one finds that for Cbank = 115 μF a DPF value of 0.9178 lagging is obtained. Figure E5.1.7 illustrates the voltage van(t) and ia(t) for this case. These wave shapes demonstrate that a resonance condition exists: the capacitor bank with the capacitance Cbank = 115 μF is able to increase the DPF but is unable to reduce the harmonic components of voltages and currents, indeed the harmonic components are increased due to the resonance condition.

e) As mentioned above the DPF can be increased but the harmonics are increased due to resonance. The solution to this power factor correction problem is the replacement of the capacitor bank (with the capacitance value Cbank) by a passive filter Zf consisting of a series connection of an inductor Lf and a capacitor Cf, which can be tuned to an appropriate frequency.
5.1.3 Benefits of Power-Factor Correction
Improving a facility’s power factor (either DPF or TPF) not only reduces utility power factor surcharges, but it can also provide lower power consumption and offer other advantages such as reduced demand charges, increased load-carrying capabilities in existing lines and circuits, improved voltage profiles, and reduced power system losses. The overall results are lower costs to consumers and the utility alike, as summarized below:
• Increased Load-Carrying Capabilities in Existing Circuits. Installing a capacitor bank at the end of a feeder (near inductive loads) improves the power factor and reduces the current carried by the feeder. This may allow the circuit to carry additional loads and save costs for upgrading the network when extra capacity is required. In addition, the lower current flow reduces resistive losses in the circuit.
• Improved Voltage Profile. A lower power factor requires a higher current flow for a given load. As the line current increases, the voltage drop in the conductor increases, which may result in a lower voltage at the load. With an improved power factor, the voltage drop in the conductor is reduced.
• Reduced Power-System Losses. In industrial distribution systems, active losses vary from 2.5 to 7.5% of the total load measured in kWh, depending on hours of full-load and no-load plant operation, wire size, and length of the feeders. Although the financial return from conductor loss reduction alone is seldom sufficient to justify the installation of capacitors, it is an attractive additional benefit, especially in older plants with long feeders. Conductor losses are proportional to the current squared, whereas the current is reduced in direct proportion to the power-factor improvement; therefore, losses are inversely proportional to the square of the power factor.
• Release of Power-System Capacity. When capacitor banks are in operation, they furnish magnetizing current for electromagnetic devices (e.g., motors, transformers), thus reducing the current demand from the power plant. Less current means less apparent power, or less loading of transformers and feeders. This means capacitors can be used to reduce system overloading and permit additional load to be added to existing facilities. Release of system capacity by power-factor improvement and especially with capacitors has become an important practice for distribution engineers.
• Reducing Electricity Bills. To encourage more efficient use of electricity and to allow the utility to recoup the higher costs of providing service to customers with low power factor demanding a high amount of current, many utilities require that the consumers improve the power factors of their installations. This may be in the form of power-factor penalty (e.g., adjusted demand charges or an overall adjustment to the bill) or a rate structure (e.g., the demand charges or power rates are based on current or apparent power). Power-factor penalties are usually imposed on larger commercial and industrial customers when their power factors fall below a certain value (e.g., 0.90 or 0.95). Customers with current or apparent power-based demand charges in effect pay more whenever their power factor is less than about unity. More and more utilities are introducing power-factor penalties (or apparent power-based demand charges) into their rate structures, in part to comply with provisions of the Clean Air Act and deregulation, and to some extent in response to growing competition in a newly deregulated power market. Without these surcharges there would be no motivation for consumers to install power-factor correction facilities. Against the financial advantages of reduced billing, the consumer must balance the cost of purchasing, installing, and maintaining the power-factor-improvement capacitors. The overall result of enforcing incentives is lower costs to consumers and the utility companies. A high power factor avoids penalties imposed by utilities and makes better use of the available capacity of a power system.
Therefore, power-factor correction capacitors are usually installed in power systems to improve the efficiency at which electrical energy is delivered and to avoid penalties imposed by utilities, making better use of the available capacity of a power system.
5.2 Application of capacitors to reactive power compensation
Reactive power compensation plays an important role in the planning and improvement of power systems. Its aim is predominantly to provide an appropriate placement of the compensation devices, which ensures a satisfactory voltage profile and a reduction in power and energy losses within the system. It also maximizes the real power transmission capability of transmission lines, while minimizing the cost of compensation.
The increase of real power transmission in a particular system is restricted by a certain critical voltage level. This critical voltage depends on the reactive power support available in the system to meet the additional load at a given operating condition. Use of series and shunt compensation is one of the corrective measures suggested by various researchers. This is performed by implementing power capacitor banks or FACTS devices. Shunt-connected capacitor banks and shunt FACTS devices are implemented to produce an acceptable voltage profile, minimize the loss of the investment, and enhance the power transmission capability. Series-connected capacitors and series FACTS devices are incorporated in transmission lines to reduce losses and improve transient behavior as well as the stability of power systems. Simultaneous compensation of losses and reactive powers is performed by series and shunt-connected FACTS devices to improve the static and dynamic performances of power systems.
Shunt capacitors applied at the receiving end of a power system supplying a load of lagging power factor have several benefits, which are the reason for their extensive applications:
• reduce the lagging component of circuit current,
• increase the voltage level at the load,
• improve voltage regulation if the capacitor units are properly switched,
• reduce I2R real power loss (measured in W) in the system due to the reduction of current,
• reduce I2X reactive power loss (measured in VAr) in the system due to the reduction of current,
• increase power factor of the source generators,
• decrease reactive power loading on source generators and circuits to relieve an overloaded condition or release capacity for additional load growth,
• by reducing reactive power load on the source generators, additional real power may be placed on the generators if turbine capacity is available, and
• to reduce demand apparent power where power is purchased. Correction to about 1 pu power factor may be economical in some cases.
5.3 Application of capacitors to harmonic filtering
Capacitors are widely used in passive and active harmonic filters. In addition, many static and converter-based power system components such as static VAr compensators, FACTS, and power quality and custom devices use capacitors as storage and compensation components.
Filters are the most frequently used devices for harmonic compensation. Passive and active filters are the main types of filters. Passive filters are composed of passive elements such as resistors (R), inductors (L), and capacitors (C). Passive harmonic filters are the most popular and effective mitigation method for harmonic problems. The passive filter is generally designed to provide a low-impedance path to prevent the harmonic current to enter the power system. They are usually tuned to a specific harmonic such as the 5th, 7th, 11th, etc. In addition, they provide displacement power-factor correction.
Filters are generally divided into passive, active, and hybrid filters. The hybrid structure uses a combination of active filters with passive filters. The passive part is used to reduce the overall filter rating and improve its performance. Classifications of passive and active filters are provided in Chapter 9.
5.3.1 Application Example 5.2: Design of a Tuned Harmonic Filter
A harmonic LC filter (consisting of a capacitor C in series with an inductor L) is to be designed in parallel to a power-factor correction (PFC) capacitor Cbank to improve the power quality (as recommended by IEEE-519 [8]) and to improve the DPF from cosφload = 0.42 lagging to 0.97 lagging (consumer notation). Data obtained from a harmonic analyzer at 30% loading are 6.35 kV/phase, 618 kW/phase, DPF = 0.42 lagging, THD i = 30.47%, fundamental frequency f = 50 Hz, and fifth harmonic (250 Hz) current I5 = 39.25 A.
Solution to Application Example 5.2
Figure E5.2.1 shows the per-phase equivalent circuit of the nonlinear load generating 5th harmonic current whereby the tuned series LC filter and the DPF correcting capacitor bank are not connected. Note that cosφload = 0.42 lagging, φload = cos− 1(0.42) = − 1.13735 rad ≡ − 66.1673°. Figure E5.5.2 illustrates the phasor diagram for real (P), reactive (Q), and complex (![]() ) powers. At 30% loading the data are
) powers. At 30% loading the data are ![]() 6.35 kV per phase, Pload_30% = 618 kW per phase, DPF = 0.42 lagging, THDi = 30.47%, f = 50 Hz,
6.35 kV per phase, Pload_30% = 618 kW per phase, DPF = 0.42 lagging, THDi = 30.47%, f = 50 Hz, ![]() 39.5A. Figure E5.2.3 illustrates the per-phase circuit when the tuned LC filter and the DPF cosφload correcting capacitor bank are present.
39.5A. Figure E5.2.3 illustrates the per-phase circuit when the tuned LC filter and the DPF cosφload correcting capacitor bank are present.



• Calculation of the required reactive power Qrequired for improving DPF to the desired value: cosφcompensated = 0.97lagging, φcompensated = cos− 1(0.97) = − 0.245566 rad ≡ − 14.0703°. P = Pload_30% = Pcompensated_30% = constant = 618 kW/phase. From the phasor diagram of Figure E5.2.2 one obtains Qload_30% = Pload_30% ∙ tanφload < 0, Qcompensated_30% = Pload_30% ∙ tanφcompensated < 0, Qrequired_30% = Pload_30% (tanφcompensated_30% - tanφload) > 0, Qrequired_30% = 618 kW [tan(− 14.0703°) - tan(− 65.1673°)] > 0,

 ) powers
) powers• According to IEEE-519 [8], THDi should drop from 30.47% to 4.0%. We employ about 30% of the required Qrequired for filtering (tuned) and the remaining for (untuned) displacement power factor compensation (DPFC). Select filter capacitance to supply 30% of Qrequired_30%:
• Assuming Y-connected (filter) capacitor banks one obtains with Q = VI = V2/XC or XC = V2/Q.
From this follows for the fundamental (1) reactance and the 5th harmonic (5) reactance ![]() or
or ![]()
![]()
The tuned filter requires: ![]() 22.772 Ω/phase.
22.772 Ω/phase.
![]() (22.772/5) = 4.5544 Ω/phase or
(22.772/5) = 4.5544 Ω/phase or ![]() 14.4975 mH/phase.
14.4975 mH/phase.
Figure E5.2.4 shows the phasor diagram for current and voltages where the magnitude of voltage ![]() is very small as compared with
is very small as compared with ![]() and
and ![]() .
.

For ![]() or
or ![]() or
or ![]() , one obtains
, one obtains ![]() 6.35 kV/113.86 Ω = 55.77A = |ĨL(1)|, and
6.35 kV/113.86 Ω = 55.77A = |ĨL(1)|, and ![]()
Without tuned LC filter:
THDi = 0.3047 = ![]() and
and ![]() 231.7A, thus
231.7A, thus ![]() 0.3047. 231.7A = 70.61A.
0.3047. 231.7A = 70.61A.
With tuned LC filter:
THDi = 0 = ![]() and
and ![]() , thus
, thus ![]() , that is no harmonic current enters the supply system. Tuned filters have a resistive component and cannot be exactly tuned, because of temperature and manufacturing tolerances.
, that is no harmonic current enters the supply system. Tuned filters have a resistive component and cannot be exactly tuned, because of temperature and manufacturing tolerances.
Although the fundamental and the fifth harmonic are not necessarily in phase, we assume the worst-case condition where both signals are in phase.
• Reactive power rating of inductor L of LC filter is with

• Reactive power rating of capacitor C of LC filter is with

• Current rating of capacitor bank Cbank at f = 50 Hz is ![]() ,
, ![]() 39.25A. Select based on Pythagorean theorem Irms = 68A, resulting in
39.25A. Select based on Pythagorean theorem Irms = 68A, resulting in ![]() , and
, and ![]() .
.
5.4 Power quality problems associated with capacitors
There are resonance effects and harmonic generation associated with capacitor installation and switching. Series and parallel resonance excitations lead to increases of voltages and currents, effects which can result in unacceptable stresses with respect to equipment installation or thermal degradation. Using joint capacitor banks for power-factor correction and reactive power compensation is a very well-established approach. However, there are power quality problems associated with using capacitors for such a purpose, especially in the presence of harmonics.
5.4.1 Transients Associated with Capacitor Switching
Transients associated with capacitor switching are generally not a problem for utility equipment. However, they could cause a number of problems for the customers, including
• voltage increases (overvoltages due to capacitor switching),
• transients can be magnified in a customer facility (e.g., if the customer has low-voltage, power-factor correction capacitors) resulting in equipment damage or failure (due to excessive overvoltages),
• nuisance tripping or shutdown (due to DC bus overvoltage) of adjustable-speed drives or other process equipment, even if the customer circuit does not employ any capacitors,
• computer network problems, and
• telephone and communication interference.
Because capacitor voltage cannot change instantaneously, energizing a capacitor bank results in an immediate drop in system voltage toward zero, followed by a fast voltage recovery (overshoot), and finally an oscillating transient voltage superimposed with the fundamental waveform (Fig. 5.3). The peak-voltage magnitude (up to 2 pu with transient frequencies of 300–1000 Hz) depends on the instantaneous system voltage at the moment of capacitor connection.

Voltage increase occurs when the transient oscillation – caused by the energization of a capacitor bank – excites a series resonance formed by the leakage inductances of a low-voltage system. The result is an overvoltage at the low-voltage bus. The worst voltage transients occur when the following conditions are met:
• The size of the switched capacitor bank is significantly larger (> 10) than the low-voltage power-factor correction bank;
• The source frequency is close to the series-resonant frequency formed by the step-down transformer and the power-factor correction-capacitor bank; and
• There is relatively small damping provided by the low-voltage load (e.g., for typical industrial plant configuration or primarily motor load with high efficiency).
Solutions to the voltage increase usually involve:
• Detune the circuit by changing capacitor bank sizes;
• Switch large banks in more than one section of the system;
• Use an overvoltage control method. For example, use switching devices that do not prestrike or restrike, employ synchronous switching of capacitors, and install high-energy metal-oxide surge arrestors to limit overvoltage and protect critical equipment;
• Apply surge arresters at locations where overvoltages occur;
• Convert low-voltage power-factor correction banks into harmonic filters (e.g., detune the circuit);
• Use properly designed and tuned filters instead of capacitors;
• Install isolation or dedicated transformers or series reactors for areas of sensitive loads; and
• Rely on transient-voltage-surge suppressors.
5.4.2 Harmonic Resonances
Improper placement and sizing of capacitors could cause parallel and/or series resonances and tune the system to a frequency that is excited by a harmonic source [7]. In industrial power systems, capacitor banks are normally specified for PFC, filtering, or reactive-power compensation without regard to resonances and other harmonic concerns. High overvoltages could result if the system is tuned to one harmonic only that is being supplied by a nonlinear load or saturated electromagnetic device such as a transformer (e.g., second, third, fourth, and fifth harmonics result from transformer inrush currents). Moreover, the capacitive reactance is inversely proportional to frequency; therefore, harmonic currents may overload capacitors beyond their limits. Thus, capacitor banks themselves may be affected by resonance, and may fail prematurely. This may even lead to plant or feeder shutdowns.
Resonance is a condition where the capacitive reactance of a system offsets its inductive reactance, leaving the small resistive elements in the network as the only means of limiting resonant currents. Depending on how the reactive elements are arranged throughout the system, the resonance can be of a series or a parallel type. The frequency at which this offsetting effect takes place is called the resonant frequency of the system.
Parallel Resonance
In a parallel-resonant circuit the inductive and the capacitive reactance impedance components are in parallel to a source of harmonic current and the resistive components of the impedances are small compared to the reactive components. The presence of a capacitor (e.g., for PFC) and harmonics may create such conditions and subject the system to failure. From the perspective of harmonic sources, shunt capacitor banks appear to be in parallel with the system short-circuit reactance. The resonant frequency of this parallel combination is

where fr and f1 are the resonant and the fundamental frequencies, respectively. Ssc and Qcap are the system short-circuit apparent power – measured in MVA –at the bus and the reactive power rating – measured in kVAr – of the capacitor, respectively. Installation of capacitors in power systems modifies the resonance frequency. If this frequency happens to coincide with one generated by the harmonic source, then excessive voltages and currents will appear, causing damage to capacitors and other electrical equipment.
Series Resonance
In a series-resonance circuit the inductive impedance of the system and the capacitive reactance of a capacitor bank are in series to a source of harmonic current. Series resonance usually occurs when capacitors are located toward the end of a feeder branch. From the harmonic source perspective, the line impedance appears in series with the capacitor. At, or close to, the resonant frequency of this series combination, its impedance will be very low. If any harmonic source generates currents near this resonant frequency, they will flow through the low-impedance path, causing interference in communication circuits along the resonant path, as well as excessive voltage distortion at the capacitor.
Capacitor Bank Behaves as a Harmonic Source
There are many capacitor banks installed in industrial and overhead distribution systems. Each capacitor bank is a source of harmonic currents of order h, which is determined by the system short-circuit impedance (Xsc, at the capacitor location) and the capacitor size (XC). This order of harmonic current is given by

Power system operation involves many switching functions that may inject currents with different harmonic resonance frequencies. Mitigation of such harmonic sources is vital. There is no safe rule to avoid such resonant currents, but resonances above 1000 Hz will probably not cause problems except interference with telephone circuits. This means the capacitive reactive power Qcapacitor should not exceed roughly 0.3% of the system short-circuit apparent power Ssc at the point of connection unless control measures are taken to deal with these current harmonics. In some cases, converting the capacitor bank into a harmonic filter might solve the entire problem without sacrificing the desired power-factor improvement.
5.4.3 Application Example 5.3: Harmonic Resonance in a Distorted Industrial Power System with Nonlinear Loads
Figure E5.3.1a shows a simplified industrial power system (Rsys = 0.06 Ω, Lsys = 0.11 mH) with a power-factor correction capacitor (Cpf = 1300 μF). Industrial loads may have nonlinear (v–i) characteristics that can be approximately modeled as (constant) decoupled harmonic current sources. The utility voltages of industrial distribution systems are often distorted due to the neighboring loads and can be approximately modeled as decoupled harmonic voltage sources (as shown in the equivalent circuit of Fig. E5.3.1b):



Fourier analyses of measured voltage and current waveforms of the utility system and the nonlinear loads can be used to estimate the values of Vsys,h, θsys,hv, INL,h, and θNL,hi. This is a practical approach because most industrial loads consist of a number of in-house nonlinear loads, and their harmonic models are not usually available.
For this example, assume
Compute frequencies of the series and parallel resonances and the harmonic currents injected into the capacitor, and plot its frequency response.
Solution to Application Example 5.3
i) To observe the effect of the nonlinear load, the harmonic voltage source (representing the distorted utility voltage) is assumed to be short-circuited. The harmonic current injected into the capacitor due to the nonlinear load is

A parallel resonance occurs when the denominator approaches zero. The frequency of the parallel resonance is

This condition will result in a large harmonic current being injected into the capacitor bank. The magnitude of the injected harmonic current can be several times the rated capacitor current, and may result in extensive harmonic voltages across the capacitor. Therefore, parallel resonance may result in the destruction of the capacitor due to overvoltage or over-current conditions.
ii) To investigate the effect of the distorted utility voltage on the capacitor, the harmonic current source (approximating the nonlinear load) is assumed to be ideal, that is, its impedance approaches infinity and behaves like an open circuit. The harmonic current injected into the capacitor due to the distorted utility source is

A series resonance occurs when the denominator approaches zero. Therefore, for this system the frequencies of the series and parallel resonances are identical:

The harmonic current injection into the power capacitor will be increased if the utility voltage contains harmonic components near resonance frequencies.
iii) The total harmonic current injected into the power capacitor is

Therefore, the 5th harmonic component of the injected current into the capacitor is


The 7th harmonic component of the injected current into the power capacitor is

iv) As expected, the 7th harmonic current of the nonlinear load and the distorted utility voltage are magnified (it is a relatively weak system; Rsys = 0.06 Ω and Xsys = 2π(60)(0.11 × 10− 3) = 0.042 Ω) due to the parallel and series and resonances at f = 420 Hz.
v) The frequency responses of the capacitor current divided by the load harmonic current and divided by the utility harmonic voltage are shown in Fig. E5.3.2.

5.4.4 Application Example 5.4: Parallel Resonance Caused by Capacitors
The single-phase diagram and the equivalent circuit (neglecting resistances) are shown in Figs E5.4.1a, b. In Fig. E5.4.1a, the source has the ratio X/R = 10. Assume X/R = 4000 (losses 0.25 W/kVAr) and X/R = 5000 (losses 0.2 W/kVAr) for low-voltage and medium-voltage high-efficiency capacitors, respectively. The harmonic current source is a six-pulse converter injecting harmonic currents of the order [8]
where n is an integer (typically from 1 to 4) and k is the number of pulses (e.g., equal to 6 for a six-pulse converter). Find the resonance frequency of this circuit. Plot the frequency response and current amplification at bus 1.

Solution to Application Example 5.4
The resonance frequency is with Ssc = MVAsc and Qcap = MVArcap

This is a characteristic frequency of the six-pulse nonlinear load.
From ![]() , with MVAsc = 72.6 MVA per phase, MVArcap = 0.6 MVAr per phase follows
, with MVAsc = 72.6 MVA per phase, MVArcap = 0.6 MVAr per phase follows ![]() .
.
Calculation of system inductance Lsys per phase:
Ssc = MVAsc = Vph∙ Iph= ![]() ,
, ![]() , therefore Ssc=
, therefore Ssc= ![]() , with Ssc = (72.6 + 0.48)MVA = 73.08MVA, Vph = 4.16 kV follows
, with Ssc = (72.6 + 0.48)MVA = 73.08MVA, Vph = 4.16 kV follows ![]() or Lsys = 0.625 mH, where ω = 2πf = 2π60 ≈ 377 rad/s.
or Lsys = 0.625 mH, where ω = 2πf = 2π60 ≈ 377 rad/s.
Calculation of C of capacitor bank:
![]() or
or ![]()
Equivalent system impedance neglecting resistances:

For h = 1,

For h = 13,

Figure E5.4.1c illustrates for h = 1 to 13 the ![]() = f (h) without resistive damping (loss), which is a plot of the equivalent system impedance magnitude as seen from bus 1. This plot is known as a frequency scan.
= f (h) without resistive damping (loss), which is a plot of the equivalent system impedance magnitude as seen from bus 1. This plot is known as a frequency scan.

 for h = 1 to 13 without and with resistive damping (loss). Note that only at resonance the loss plays a significant role.
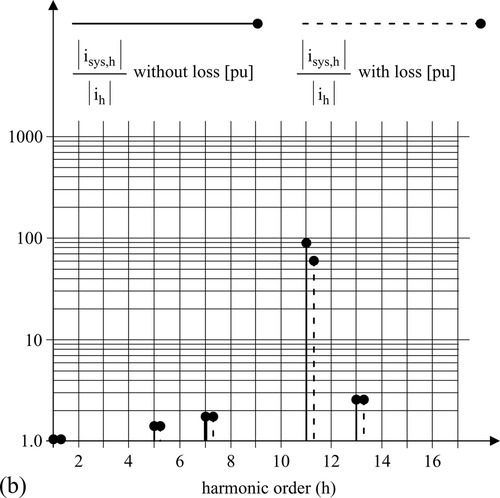
for h = 1 to 13 without and with resistive damping (loss). Note that only at resonance the loss plays a significant role.One determines the ratio ![]() , and correspondingly,
, and correspondingly, ![]() .
.
For h = 1,

For h = 13,

The absolute values of iC,h/ih and isys, h/ih for h = 1 to 13 are depicted in Figures E5.4.2a,b respectively, as a function of h without resistive damping (loss), which is the current amplification.

Taking the resistive components into account yields the following relations and values:
Xsys = 10Rsys or Rsys = ωLsys/10 = (377.0.625 m)/10 = 0.02356 Ω. For low-voltage capacitors XC/RC = 4000 Ω or ![]()
The impedances are:  where Rsys and RC are assumed to be independent of h.
where Rsys and RC are assumed to be independent of h.
For h = 1,

For h = 13,

The magnitudes ![]() as a function of h are plotted in Figure E5.4.1c for h = 1 to 13 taking into account damping by resistances Rsys and RC.
as a function of h are plotted in Figure E5.4.1c for h = 1 to 13 taking into account damping by resistances Rsys and RC.
The ratio iC,h/ih is taking into account damping ![]() , correspondingly
, correspondingly ![]() .
.
For h = 1,


For h = 13,


The absolute values of iC,h/ih and isys,h/ih for h = 1 to 13 are depicted in Figures P5.4.2a,b, respectively, as a function of h with resistive damping (loss).
5.4.5 Application Example 5.5: Series Resonance Caused by Capacitors
An example of a series resonance system is demonstrated in Fig. E5.5.1a. The equivalent circuit (neglecting resistances) is shown in Fig. E5.5.1b. Find the resonance frequency of this circuit. Plot the frequency response of bus 1 equivalent impedance, and the current amplification across the tuning reactor. This circuit produces a low-frequency path for the 5th harmonic current. The absolute value of Z = (R + j0.049pu) is ![]() pu at h = 5 is known, and the phase angle (crossing the zero axis at h = 5) is not given.
pu at h = 5 is known, and the phase angle (crossing the zero axis at h = 5) is not given.

Solution to Application Example 5.5
The series resonance frequency is

With ![]() , XL = 1.154 Ω = ωL = 377 ∙ L or L = 1.154/377 = 3.061 mH.
, XL = 1.154 Ω = ωL = 377 ∙ L or L = 1.154/377 = 3.061 mH.
From Q = VphIph = ![]() or
or ![]() and XC = 1/ωC=
and XC = 1/ωC= ![]() ; therefore,
; therefore, ![]() .
.
Based on MVAsc = Vph Iph = ![]() , Xsys/Rsys = 10 or Rsys = Xsys/10 = ωLsys/10, MVAsc=
, Xsys/Rsys = 10 or Rsys = Xsys/10 = ωLsys/10, MVAsc=![]() , or
, or ![]() .
.
Analysis without Rsys, RL, and RC:
Impedance of resonant circuit is ![]() ; therefore:
; therefore:
Also, ![]() ; therefore:
; therefore:




Figure E5.5.2 illustrates the magnitude Zmag without lossh of the parallel impedance Zhparallel_without_loss for h = 1 to 13 without loss. Note that this circuit also has a parallel resonance at h = 4.6: this is the frequency at which the series-resonant circuit has a capacitive reactance equal in magnitude to the inductive reactance of the source.
Using ![]() and
and ![]() , one gets:
, one gets:








Figure E5.5.3 illustrates the series current |iseries,h|/|ih| for h = 1 to 13 without loss.

Taking into account the resistances of the inductors and capacitors, one obtains:
![]()
![]()
At h = 5 the inductor-capacitor series connection has the impedance Zh = 0.049Ω or ![]() resulting in
resulting in ![]()
Therefore:
![]()
![]()
![]()
Also, ![]() ; therefore:
; therefore:




Figure E5.5.2 illustrates the parallel impedance Zmag_with_lossh for h = 1 to 13 with loss.
Using  and
and ![]() , one gets
, one gets








Figure E5.5.3 illustrates the series current |iseries,h|/|ih| as a function of h with loss.
The plot of the current amplification through the series-resonant circuit is given in Fig. E5.5.3, pertaining to the tuned point, h = 5, and Ipu = 0.9985 pu to 0.9978 pu. The current amplification should be near unity at the tuned frequency. Note that this circuit also has a parallel resonance at h = 4.6, where the amplification factor (AF) is Ipu = 8.445 pu to 7.639 pu. This is the frequency at which the series-resonant circuit has a capacitive reactance equal in magnitude to the inductive reactance of the source.
5.4.6 Application Example 5.6: Protecting Capacitors by Virtual Harmonic Resistors
Repeat Application Example 5.3 assuming a power converter is used to include a virtual harmonic resistor Rvir = 0.5 Ω in series with the capacitor.