3.2. RESEARCH CHALLENGES 25
and a mid-to-mid learning approach were key to allowing the model to learn to drive the vehicle
while avoiding undesirable behaviors.
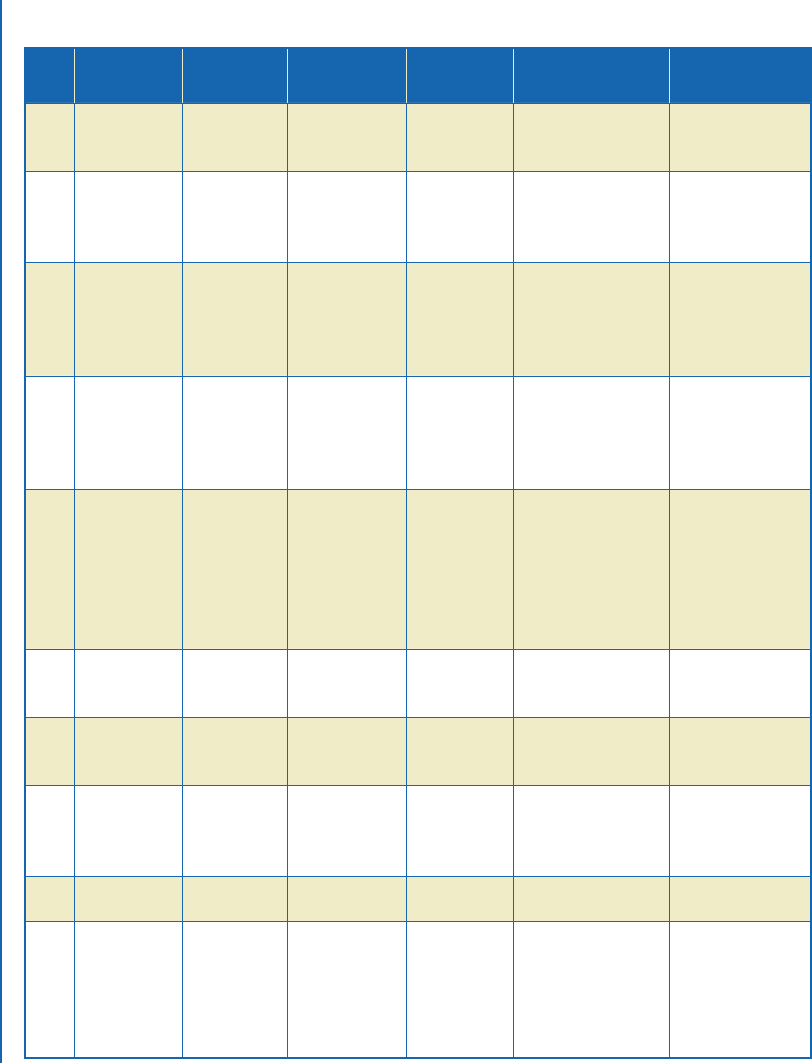
A summary of the full vehicle control techniques presented in this chapter can be seen
in Table 3.3. In contrast to the previous sections, a variety of learning and implementation
approaches were used in this section. Machine learning approaches have demonstrated strong
results for driving tasks such as lane keeping or vehicle following. While these results are impor-
tant, for fully automated driving, more complex tasks need to be considered. e network should
be able to consider low-level goals (e.g., lane keeping, vehicle following) alongside high-level
goals (e.g., route following, traffic lights). Early research has been carried out integrating high-
level context to the machine learning models, but these models are still far from human-level
performance.
3.2 RESEARCH CHALLENGES
e discussion in previous sections has shown that important results have been achieved in the
field of autonomous vehicle control using deep learning techniques. However, research in this
area is on-going, and there exists multiple research challenges that prevent these systems from
achieving the performance levels required for commercial deployment. In this section, we will
discuss some key research challenges that need to be overcome before the systems are ready
to be deployed. It is worth remembering that besides these research challenges, there are also
more general challenges preventing the deployment of autonomous vehicles such as legislative,
user acceptance, and economic challenges. However, since the focus here is on the research
challenges, for information on more general challenges we refer the interested readers to the
discussions in [115–120].
3.2.1 COMPUTATION
Computation requirements are an issue for any deep learning solution due to the vast amount of
training data (supervised learning) or training experience (reinforcement learning) required. Al-
though the increase in parallelisable computational power has (partly) sparked the recent interest
in deep learning, with deeper models and more complex problems the computational require-
ments are becoming an obstacle for deployment of deep neural network driven autonomous ve-
hicles [121–123]. Furthermore, the sample inefficiency, which many state-of-the-art deep rein-
forcement learning algorithms suffer from [124], means that a vast number of training episodes
are required to converge to an optimal control policy. Since training the policy in the real world
is often unfeasible, simulation is used as a solution. However, this results in high computation
requirements for reinforcement learning.
26 3. DEEP LEARNING FOR VEHICLE CONTROL
Table 3.3: A comparison of full vehicle control techniques
Ref.
Learning
Strategy
Network Inputs Outputs Pros Cons
[104] Supervised
learning
RNN Relative distance,
relative velocity
Desired accel-
eration
Adapts to driving
styles of other vehicles
Only considers a
simplifi ed roundabout
scenario
[
105] Supervised
reinforcement
learning
Feedforward
network with
two hidden
layers
Not mentioned Steering, accel-
eration,
braking
Fast training Unstable (can
steer off the road)
[
106] Reinforcement
learning
Feedforward/
Actor-Critic
Network
Position in lane,
velocity
Steering, gear,
brake, and ac-
celeration val-
ues (discretized
for DQN)
Continuous policy
provides smooth
steering
Simple simulation
environment
[107] Supervised
learning
CNN/Feedfor-
ward
Simulated camera
image
Steering angle,
binary
braking deci-
sion
Estimates safety of
the policy in any given
state, DAgger provides
robustness to
compounding errors
Simple simulation
environment, simpli-
fi ed longitudinal
output
[
109] Supervised
learning
CNN Camera image Steering and
throttle
High-speed driving,
learns to drive on low
cost cameras, robustness
of DAgger
to compounding errors
Trained only for
elliptical race tracks
with no other vehi-
cles, requires itera-
tively building the
dataset with the
reference policy
[110] Supervised
learning
CNN Image nine discrete
actions for
motion
Object-centric policy
provides attention to
important objects
Highly simplifi ed
action space
[
111] Reinforcement
learning
VAE-RNN Semantically seg-
mented image
Steering, accel-
eration
Improves collision
rates over braking only
policies
Only considers
imminent collision
scenarios
[113] Supervised
learning
CNN Camera image,
navigational
command
Steering angle,
acceleration
Takes navigational
commands into
account, generalizes to
new environments
Occasionally fails
to take correct turn
on fi rst attempt
[
112] Supervised
learning
CNN 360° view camera
image, route plan
Steering angle,
velocity
Takes route plan
into account
Lack of live testing
[114] Supervised
learning
CNN-RNN Pre-processed
top-down image
of surroundings
Heading, veloc-
ity, waypoint
Ease of transfer from
simulation to the
real world, robust
to deviations from
trajectory
Can output way-
points which make
turns infeasible, can
be over aggressive
with other vehicles in
new scenarios
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.