 Modifying parameters with rqt_reconfigure
by Aaron Martinez, Anil Mahtani, Luis Sánchez Crespo, Enrique Fernández
Learning ROS for Robotics Programming - Second Edition
Modifying parameters with rqt_reconfigure
by Aaron Martinez, Anil Mahtani, Luis Sánchez Crespo, Enrique Fernández
Learning ROS for Robotics Programming - Second Edition
- Learning ROS for Robotics Programming Second Edition
- Table of Contents
- Learning ROS for Robotics Programming Second Edition
- Credits
- About the Author
- Acknowledgments
- About the Author
- Acknowledgments
- About the Author
- Acknowledgments
- About the Author
- Acknowledgments
- About the Reviewer
- About the Reviewer
- Acknowledgments
- About the Reviewers
- www.PacktPub.com
- Preface
- 1. Getting Started with ROS Hydro
- 2. ROS Architecture and Concepts
- Understanding the ROS Filesystem level
- Understanding the ROS Computation Graph level
- Understanding the ROS Community level
- Tutorials to practice with ROS
- Navigating by ROS Filesystem
- Creating our own workspace
- Creating a ROS package and metapackage
- Building an ROS package
- Playing with ROS nodes
- Learning how to interact with topics
- Learning how to use services
- Using Parameter Server
- Creating nodes
- Building the node
- Creating msg and srv files
- Using the new srv and msg files
- The launch file
- Dynamic parameters
- Summary
- 3. Visualization and Debug Tools
- Debugging ROS nodes
- Logging messages
- Outputting a logging message
- Setting the debug message level
- Configuring the debugging level of a particular node
- Giving names to messages
- Conditional and filtered messages
- Showing messages in the once, throttle, and other combinations
- Using rqt_console and rqt_logger_level to modify the debugging level on the fly
- Inspecting what is going on
- Setting dynamic parameters
- When something weird happens
- Visualizing node diagnostics
- Plotting scalar data
- Image visualization
- 3D visualization
- Saving and playing back data
- Using the rqt_gui and rqt plugins
- Summary
- 4. Using Sensors and Actuators with ROS
- Using a joystick or a gamepad
- Using a laser rangefinder – Hokuyo URG-04lx
- Using the Kinect sensor to view objects in 3D
- Using servomotors – Dynamixel
- Using Arduino to add more sensors and actuators
- Using an ultrasound range sensor with Arduino
- How distance sensors send messages
- Using a low-cost IMU – 10 degrees of freedom
- Using a GPS system
- Summary
- 5. Computer Vision
- 6. Point Clouds
- 7. 3D Modeling and Simulation
- 8. The Navigation Stack – Robot Setups
- 9. The Navigation Stack – Beyond Setups
- Creating a package
- Creating a robot configuration
- Configuring the costmaps – global_costmap and local_costmap
- Creating a launch file for the navigation stack
- Setting up rviz for the navigation stack
- Adaptive Monte Carlo Localization
- Modifying parameters with rqt_reconfigure
- Avoiding obstacles
- Sending goals
- Summary
- 10. Manipulation with MoveIt!
- Index
A good option for understanding all the parameters configured in this chapter, is by using rqt_reconfigure to change the values without restarting the simulation.
To launch rqt_reconfigure, use the following command:
$ rosrun rqt_reconfigure rqt_reconfigure
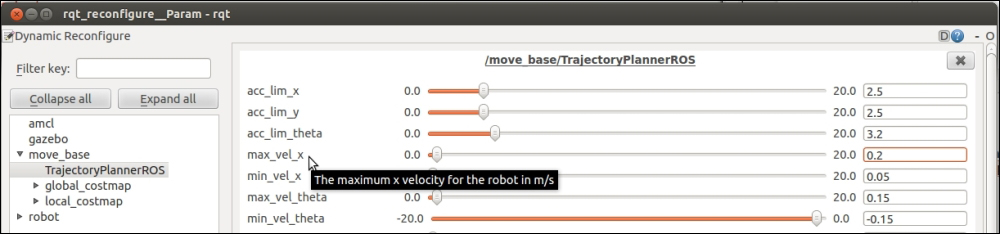
You will see the screen as follows:

As an example, we are going to change the parameter max_vel_x configured in the file, base_local_planner_params.yaml. Click over the move_base menu and expand it. Then select TrajectoryPlannerROS in the menu tree. You will see a list of parameters. As you can see, the parameter max_vel_x has the same value that we assigned in the configuration file.
You can see a brief description for the parameter by hovering the mouse over the name for a few seconds. This is very useful for understanding the function of each parameter.
-
No Comment