
Introduction to Power Quality
Abstract
Introduces the definition of electric power quality, its causes and classification: transients, short-duration voltage variations, interruptions, sags, swells, long-duration voltage variations, sustained interruption, under- and over-voltage, voltage imbalance, waveform distortion, DC offset, harmonics, inter-harmonics, non-integer harmonics, triplen harmonics, sub-harmonics, time and space harmonics, characteristic and uncharacteristic harmonics, positive-negative- and zero-sequence harmonics, notching, electric noise, voltage fluctuation and flicker, and power-frequency variations. The formulations and measures used for power quality; impacts of poor power quality on power system and end-use devices; most important IEEE and IEC guidelines/recommendations/standards referring to power quality; modelling, mitigation and elimination techniques for power quality phenomena are presented. 9 application examples with solutions and 15 application-oriented problems are listed.
The subject of power quality is very broad by nature. It covers all aspects of power system engineering, from transmission and distribution level analyses to end-user problems. Therefore, electric power quality has become the concern of utilities, end users, architects, and civil engineers as well as manufacturers. These professionals must work together in developing solutions to power quality problems:
• Electric utility managers and designers must build and operate systems that take into account the interaction between customer facilities and power system. Electric utilities must understand the sensitivity of the end-use equipment to the quality of voltage.
• Customers must learn to respect the rights of their neighbors and control the quality of their nonlinear loads. Studies show that the best and the most efficient solution to power quality problems is to control them at their source. Customers can perform this by careful selection and control of their nonlinear loads and by taking appropriate actions to control and mitigate single-time disturbances and harmonics before connecting their loads to the power system.
• Architects and civil engineers must design buildings to minimize the susceptibility and vulnerability of electrical components to power quality problems.
• Manufacturers and equipment engineers must design devices that are compatible with the power system. This might mean a lower level of harmonic generation or less sensitivity to voltage distortions.
• Engineers must be able to devise ride-through capabilities of distributed generators (e.g., wind and solar generating plants).
This chapter introduces the subject of electric power quality. After a brief definition of power quality and its causes, detailed classification of the subject is presented. The formulations and measures used for power quality are explained and the impacts of poor power quality on power system and end-use devices such as appliances are mentioned. A section is presented addressing the most important IEEE [1] and IEC [2] standards referring to power quality. The remainder of this chapter introduces issues that will be covered in the following chapters, including modeling and mitigation techniques for power quality phenomena in electric machines and power systems. This chapter contains nine application examples and ends with a summary.
1.1 Definition of power quality
Electric power quality has become an important part of power systems and electric machines. The subject has attracted the attention of many universities and industries, and a number of books have been published in this exciting and relatively new field [3–12].
Despite important papers, articles, and books published in the area of electric power quality, its definition has not been universally agreed upon. However, nearly everybody accepts that it is a very important aspect of power systems and electric machinery with direct impacts on efficiency, security, and reliability. Various sources use the term “power quality” with different meaning. It is used synonymously with “supply reliability,” “service quality,” “voltage quality,” “current quality,” “quality of supply,” and “quality of consumption.”
Judging by the different definitions, power quality is generally meant to express the quality of voltage and/or the quality of current and can be defined as: the measure, analysis, and improvement of the bus voltage to maintain a sinusoidal waveform at rated voltage and frequency. This definition includes all momentary and steady-state phenomena.
1.2 Causes of disturbances in power systems
Although a significant literature on power quality is now available, most engineers, facility managers, and consumers remain unclear as to what constitutes a power quality problem. Furthermore, due to the power system impedance, any current (or voltage) harmonic will result in the generation and propagation of voltage (or current) harmonics and affects the entire power system. Figure 1.1 illustrates the impact of current harmonics generated by a nonlinear load on a typical power system with linear loads.

What are the origins of the power quality problem? Some references [9] divide the distortion sources into three categories: small and predictable (e.g., residential consumers generating harmonics), large and random (e.g., arc furnaces producing voltage fluctuations and flicker), and large and predictable (e.g., static converters of smelters and high-voltage DC transmission causing characteristic and uncharacteristic harmonics as well as harmonic instability). However, the likely answers to the question are these: unpredictable events, the electric utility, the customer, and the manufacturer.
Unpredictable Events
Both electric utilities and end users agree that more than 60% of power quality problems are generated by natural and unpredictable events [6]. Some of these include faults, lightning surge propagation, resonance, ferroresonance, and geomagnetically induced currents (GICs) due to solar flares [13]. These events are considered to be utility related problems.
The Electric Utility
There are three main sources of poor power quality related to utilities:
• The point of supply generation. Although synchronous machines generate nearly perfect sinusoidal voltages (harmonic content less than 3%), there are power quality problems originating at generating plants which are mainly due to maintenance activity, planning, capacity and expansion constraints, scheduling, events leading to forced outages, and load transferring from one substation to another.
• The transmission system. Relatively few power quality problems originate in the transmission system. Typical power quality problems originating in the transmission system are galloping (under high-wind conditions resulting in supply interruptions and/or random voltage variations), lightning (resulting in a spike or transient overvoltage), insulator flashover, voltage dips (due to faults), interruptions (due to planned outages by utility), transient overvoltages (generated by capacitor and/or inductor switching, and lightning), transformer energizing (resulting in inrush currents that are rich in harmonic components), improper operation of voltage regulation devices (which can lead to long-duration voltage variations), slow voltage variations (due to a long-term variation of the load caused by the continuous switching of devices and load), flexible AC transmission system (FACTS) devices [14] and high-voltage DC (HVDC) systems [15], corona [16], power line carrier signals [17], broadband power line (BPL) communications [18], and electromagnetic fields (EMFs) [19].
• The distribution system. Typical power quality problems originating in the distribution system are voltage dips, spikes, and interruptions, transient overvoltages, transformer energizing, improper operation of voltage regulation devices, slow voltage variations, power line carrier signals, BPL, and EMFs.
The Customer
Customer loads generate a considerable portion of power quality problems in today’s power systems. Some end-user related problems are harmonics (generated by nonlinear loads such as power electronic devices and equipment, renewable energy sources, FACTS devices, adjustable-speed drives, uninterruptible power supplies (UPS), fax machines, laser printers, computers, and fluorescent lights), poor power factor (due to highly inductive loads such as induction motors and air-conditioning units), flicker (generated by arc furnaces [20]), transients (mostly generated inside a facility due to device switching, electrostatic discharge, and arcing), improper grounding (causing most reported customer problems), frequency variations (when secondary and backup power sources, such as diesel engine and turbine generators, are used), misapplication of technology, wiring regulations, and other relevant standards.
Manufacturing Regulations
There are two main sources of poor power quality related to manufacturing regulations:
• Standards. The lack of standards for testing, certification, sale, purchase, installation, and use of electronic equipment and appliances is a major cause of power quality problems.
• Equipment sensitivity. The proliferation of “sensitive” electronic equipment and appliances is one of the main reasons for the increase of power quality problems. The design characteristics of these devices, including computer-based equipment, have increased the incompatibility of a wide variety of these devices with the electrical environment [21].
Power quality therefore must necessarily be tackled from three fronts, namely:
• The utility must design, maintain, and operate the power system while minimizing power quality problems;
• The end user must employ proper wiring, system grounding practices, and state-of-the-art electronic devices; and
• The manufacturer must design electronic devices that keep electrical environmental disturbances to a minimum and that are immune to anomalies of the power supply line.
1.3 Classification of power quality issues
To solve power quality problems it is necessary to understand and classify this relatively complicated subject. This section is based on the power quality classification and information from references [6] and [9].
There are different classifications for power quality issues, each using a specific property to categorize the problem. Some of them classify the events as “steady-state” and “non-steady-state” phenomena. In some regulations (e.g., ANSI C84.1 [22]) the most important factor is the duration of the event. Other guidelines (e.g., IEEE-519) use the wave shape (duration and magnitude) of each event to classify power quality problems. Other standards (e.g., IEC) use the frequency range of the event for the classification.
For example, IEC 61000-2-5 uses the frequency range and divides the problems into three main categories: low frequency (< 9 kHz), high frequency (> 9 kHz), and electrostatic discharge phenomena. In addition, each frequency range is divided into “radiated” and “conducted” disturbances. Table 1.1 shows the principal phenomena causing electromagnetic disturbances according to IEC classifications [9]. All these phenomena are considered to be power quality issues; however, the two conducted categories are more frequently addressed by the industry.
Table 1.1
Main Phenomena Causing Electromagnetic and Power Quality Disturbances [6,9]
Conducted low-frequency phenomena
Harmonics, interharmonics
Signaling voltage
Voltage fluctuations
Voltage dips
Voltage imbalance
Power frequency variations
Induced low-frequency voltages
DC components in AC networks
Radiated low-frequency phenomena
Magnetic fields
Electric fields
Conducted high-frequency phenomena
Induced continuous wave (CW) voltages or currents
Unidirectional transients
Oscillatory transients
Radiated high-frequency phenomena
Magnetic fields
Electric fields
Electromagnetic field
Steady-state waves
Transients
Electrostatic discharge phenomena (ESD)
Nuclear electromagnetic pulse (NEMP)
The magnitude and duration of events can be used to classify power quality events, as shown in Fig. 1.2. In the magnitude–duration plot, there are nine different parts [11]. Various standards give different names to events in these parts. The voltage magnitude is split into three regions:

• interruption: voltage magnitude is zero,
• undervoltage: voltage magnitude is below its nominal value, and
• overvoltage: voltage magnitude is above its nominal value.
The duration of these events is split into four regions: very short, short, long, and very long. The borders in this plot are somewhat arbitrary and the user can set them according to the standard that is used.
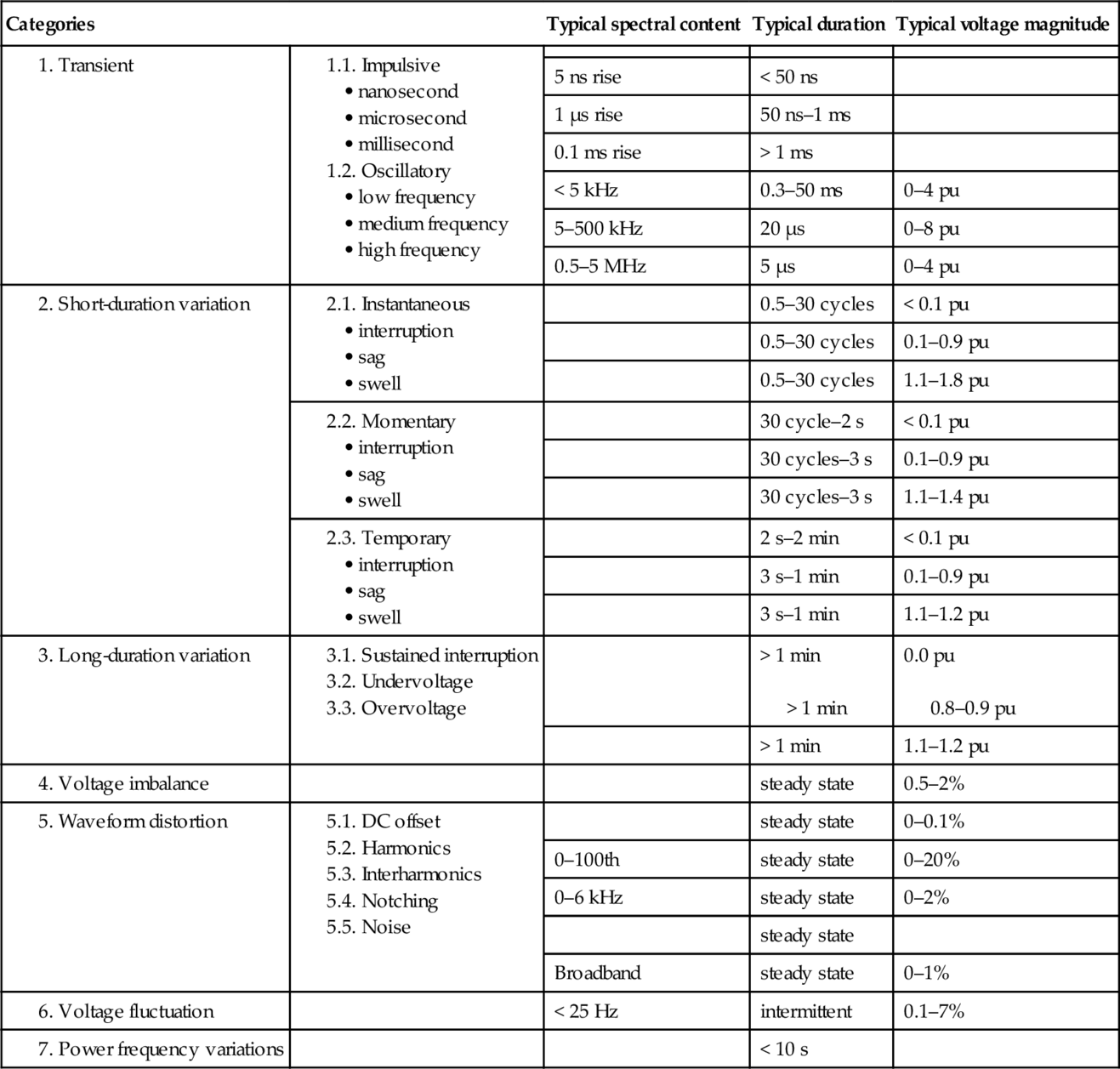
IEEE standards use several additional terms (as compared with IEC terminology) to classify power quality events. Table 1.2 provides information about categories and characteristics of electromagnetic phenomena defined by IEEE-1159 [23]. These categories are briefly introduced in the remaining parts of this section.
Table 1.2
Categories and Characteristics of Electromagnetic Phenomena in Power Systems as Defined by IEEE-1159 [6,9]
| Categories | Typical spectral content | Typical duration | Typical voltage magnitude | |
|
• microsecond • millisecond 1.2. Oscillatory • medium frequency • high frequency | ||||
| 5 ns rise | < 50 ns | |||
| 1 μs rise | 50 ns–1 ms | |||
| 0.1 ms rise | > 1 ms | |||
| < 5 kHz | 0.3–50 ms | 0–4 pu | ||
| 5–500 kHz | 20 μs | 0–8 pu | ||
| 0.5–5 MHz | 5 μs | 0–4 pu | ||
|
• sag • swell | 0.5–30 cycles | < 0.1 pu | ||
| 0.5–30 cycles | 0.1–0.9 pu | |||
| 0.5–30 cycles | 1.1–1.8 pu | |||
|
• sag • swell | 30 cycle–2 s | < 0.1 pu | ||
| 30 cycles–3 s | 0.1–0.9 pu | |||
| 30 cycles–3 s | 1.1–1.4 pu | |||
|
• sag • swell | 2 s–2 min | < 0.1 pu | ||
| 3 s–1 min | 0.1–0.9 pu | |||
| 3 s–1 min | 1.1–1.2 pu | |||
|
3.2. Undervoltage 3.3. Overvoltage | > 1 min > 1 min | 0.0 pu 0.8–0.9 pu | ||
| > 1 min | 1.1–1.2 pu | |||
| steady state | 0.5–2% | |||
|
5.2. Harmonics 5.3. Interharmonics 5.4. Notching 5.5. Noise | steady state | 0–0.1% | ||
| 0–100th | steady state | 0–20% | ||
| 0–6 kHz | steady state | 0–2% | ||
| steady state | ||||
| Broadband | steady state | 0–1% | ||
| < 25 Hz | intermittent | 0.1–7% | ||
| < 10 s |
1.3.1 Transients
Power system transients are undesirable, fast- and short-duration events that produce distortions. Their characteristics and waveforms depend on the mechanism of generation and the network parameters (e.g., resistance, inductance, and capacitance) at the point of interest. “Surge” is often considered synonymous with transient.
Transients can be classified with their many characteristic components such as amplitude, duration, rise time, frequency of ringing polarity, energy delivery capability, amplitude spectral density, and frequency of occurrence. Transients are usually classified into two categories: impulsive and oscillatory (Table 1.2).
An impulsive transient is a sudden frequency change in the steady-state condition of voltage, current, or both that is unidirectional in polarity (Fig. 1.3). The most common cause of impulsive transients is a lightning current surge. Impulsive transients can excite the natural frequency of the system.

An oscillatory transient is a sudden frequency change in the steady-state condition of voltage, current, or both that includes both positive and negative polarity values. Oscillatory transients occur for different reasons in power systems such as appliance switching, capacitor bank switching (Fig. 1.4), fast-acting overcurrent protective devices, and ferroresonance (Fig. 1.5).


1.3.2 Short-Duration Voltage Variations
This category encompasses the IEC category of “voltage dips” and “short interruptions.” According to the IEEE-1159 classification, there are three different types of short-duration events (Table 1.2): instantaneous, momentary, and temporary. Each category is divided into interruption, sag, and swell. Principal cases of short-duration voltage variations are fault conditions, large load energization, and loose connections.
Interruption
Interruption occurs when the supply voltage (or load current) decreases to less than 0.1 pu for less than 1 minute, as shown by Fig. 1.6. Some causes of interruption are equipment failures, control malfunction, and blown fuse or breaker opening.

The difference between long (or sustained) interruption and interruption is that in the former the supply is restored manually, but during the latter the supply is restored automatically. Interruption is usually measured by its duration. For example, according to the European standard EN-50160 [24]:
• A short interruption is up to 3 minutes; and
• A long interruption is longer than 3 minutes.
However, based on the standard IEEE-1250 [25]:
• An instantaneous interruption is between 0.5 and 30 cycles;
• A momentary interruption is between 30 cycles and 2 seconds;
• A temporary interruption is between 2 seconds and 2 minutes; and
• A sustained interruption is longer than 2 minutes.
Sags (Dips)
Sags are short-duration reductions in the rms voltage between 0.1 and 0.9 pu, as shown by Fig. 1.7. There is no clear definition for the duration of sag, but it is usually between 0.5 cycles and 1 minute. Voltage sags are usually caused by:

• energization of heavy loads (e.g., arc furnace),
• starting of large induction motors,
• single line-to-ground faults, and
• load transferring from one power source to another.
Each of these cases may cause a sag with a special (magnitude and duration) characteristic. For example, if a device is sensitive to voltage sag of 25%, it will be affected by induction motor starting [11]. Sags are main reasons for malfunctions of electrical low-voltage devices. Uninterruptible power supply (UPS) or power conditioners are mostly used to prevent voltage sags.
Swells
The increase of voltage magnitude between 1.1 and 1.8 pu is called swell, as shown by Fig. 1.8. The most accepted duration of a swell is from 0.5 cycles to 1 minute [7]. Swells are not as common as sags and their main causes are:

• switching off of a large load,
• energizing a capacitor bank, or
• voltage increase of the unfaulted phases during a single line-to-ground fault [10].
In some textbooks the term “momentary overvoltage” is used as a synonym for the term swell. As in the case of sags, UPS or power conditioners are typical solutions to limit the effect of swell [10].
1.3.3 Long-Duration Voltage Variations
According to standards (e.g., IEEE-1159, ANSI-C84.1), the deviation of the rms value of voltage from the nominal value for longer than 1 minute is called long-duration voltage variation. The main causes of long-duration voltage variations are load variations and system switching operations. IEEE-1159 divides these events into three categories (Table 1.2): sustained interruption, undervoltage, and overvoltage.
Sustained Interruption
Sustained (or long) interruption is the most severe and the oldest power quality event at which voltage drops to zero and does not return automatically. According to the IEC definition, the duration of sustained interruption is more than 3 minutes; but based on the IEEE definition the duration is more than 1 minute. The number and duration of long interruptions are very important characteristics in measuring the ability of a power system to deliver service to customers. The most important causes of sustained interruptions are:
• fault occurrence in a part of power systems with no redundancy or with the redundant part out of operation,
• an incorrect intervention of a protective relay leading to a component outage, or
• scheduled (or planned) interruption in a low-voltage network with no redundancy.
Undervoltage
The undervoltage condition occurs when the rms voltage decreases to 0.8–0.9 pu for more than 1 minute.
Overvoltage
Overvoltage is defined as an increase in the rms voltage to 1.1–1.2 pu for more than 1 minute. There are three types of overvoltages:
• overvoltages generated by an insulation fault, ferroresonance, faults with the alternator regulator, tap changer transformer, or overcompensation;
• lightning overvoltages; and
• switching overvoltages produced by rapid modifications in the network structure such as opening of protective devices or the switching on of capacitive circuits.
1.3.4 Voltage Imbalance
When voltages of a three-phase system are not identical in magnitude and/or the phase differences between them are not exactly 120 degrees, voltage imbalance occurs [10]. There are two ways to calculate the degree of imbalance:
• divide the maximum deviation from the average of three-phase voltages by the average of three-phase voltages, or
• compute the ratio of the negative- (or zero-) sequence component to the positive-sequence component [7].
The main causes of voltage imbalance in power systems are:
• unbalanced single-phase loading in a three-phase system,
• overhead transmission lines that are not transposed,
• blown fuses in one phase of a three-phase capacitor bank, and
• severe voltage imbalance (e.g., > 5%), which can result from single phasing conditions.
1.3.5 Waveform Distortion
A steady-state deviation from a sine wave of power frequency is called waveform distortion [7]. There are five primary types of waveform distortions: DC offset, harmonics, interharmonics, notching, and electric noise. A Fourier series is usually used to analyze the nonsinusoidal waveform.
DC Offset
The presence of a DC current and/or voltage component in an AC system is called DC offset [7]. Main causes of DC offset in power systems are:
• employment of rectifiers and other electronic switching devices, and
• geomagnetic disturbances [6,7,13] causing GICs.
The main detrimental effects of DC offset in alternating networks are
• half-cycle saturation of transformer core [26–28],
• generation of even harmonics [26] in addition to odd harmonics [29,30],
• additional heating in appliances leading to a decrease of the lifetime of transformers [31–36], rotating machines, and electromagnetic devices, and
• electrolytic erosion of grounding electrodes and other connectors.
Figure 1.9a shows strong half-cycle saturation in a transformer due to DC magnetization and the influence of the tank, and Fig. 1.9b exhibits less half-cycle saturation due to DC magnetization and the absence of any tank. One concludes that to suppress DC currents due to rectifiers and geomagnetically induced currents, three-limb transformers with a relatively large air gap between core and tank should be used.


Harmonics
Harmonics are sinusoidal voltages or currents with frequencies that are integer multiples of the power system (fundamental) frequency (usually, f = 50 or 60 Hz). For example, the frequency of the hth harmonic is (hf). Periodic nonsinusoidal waveforms can be subjected to Fourier series and can be decomposed into the sum of fundamental component and harmonics. Main sources of harmonics in power systems are:
• industrial nonlinear loads (Fig. 1.10) such as power electronic equipment, for example, drives (Fig. 1.10a), rectifiers (Fig. 1.10b,c), inverters, or loads generating electric arcs, for example, arc furnaces, welding machines, and lighting, and


• residential loads with switch-mode power supplies such as television sets, computers (Fig. 1.11), and fluorescent and energy-saving lamps.

Some detrimental effects of harmonics are:
• maloperation of control devices,
• additional losses in capacitors, transformers, and rotating machines,
• additional noise from motors and other apparatus,
• telephone interference, and
• causing parallel and series resonance frequencies (due to the power factor correction capacitor and cable capacitance), resulting in voltage amplification even at a remote location from the distorting load.
Recommended solutions to reduce and control harmonics are applications of high-pulse rectification, passive, active, and hybrid filters, and custom power devices such as active-power line conditioners (APLCs) and unified power quality conditioners (UPQCs).
Interharmonics
Interharmonics are discussed in Section 1.4.1. Their frequencies are not integer multiples of the fundamental frequency.
Notching
A periodic voltage disturbance caused by line-commutated thyristor circuits is called notching. The notching appears in the line voltage waveform during normal operation of power electronic devices when the current commutates from one phase to another. During this notching period, there exists a momentary short-circuit between the two commutating phases, reducing the line voltage; the voltage reduction is limited only by the system impedance.
Notching is repetitive and can be characterized by its frequency spectrum (Figs. 1.10b,c). The frequency of this spectrum is quite high. Usually it is not possible to measure it with equipment normally used for harmonic analysis. Notches can impose extra stress on the insulation of transformers, generators, and sensitive measuring equipment.
Notching can be characterized by the following properties:
• Notch depth: average depth of the line voltage notch from the sinusoidal waveform at the fundamental frequency;
• Notch width: the duration of the commutation process;
• Notch area: the product of notch depth and width; and
• Notch position: where the notch occurs on the sinusoidal waveform.
Some standards (e.g., IEEE-519) set limits for notch depth and duration (with respect to the system impedance and load current) in terms of the notch depth, the total harmonic distortion THDv of supply voltage, and the notch area for different supply systems.
Electric Noise
Electric noise is defined as unwanted electrical signals with broadband spectral content lower than 200 kHz [37] superimposed on the power system voltage or current in phase conductors, or found on neutral conductors or signal lines. Electric noise may result from faulty connections in transmission or distribution systems, arc furnaces, electrical furnaces, power electronic devices, control circuits, welding equipment, loads with solid-state rectifiers, improper grounding, turning off capacitor banks, adjustable-speed drives, corona, and broadband power line (BPL) communication circuits. The problem can be mitigated by using filters, line conditioners, and dedicated lines or transformers. Electric noise impacts electronic devices such as microcomputers and programmable controllers.
1.3.6 Voltage Fluctuation and Flicker
Voltage fluctuations are systemic variations of the voltage envelope or random voltage changes, the magnitude of which does not normally exceed specified voltage ranges (e.g., 0.9 to 1.1 pu as defined by ANSI C84.1-1982) [22,38]. Voltage fluctuations are divided into two categories:
• step-voltage changes, regular or irregular in time, and
• cyclic or random voltage changes produced by variations in the load impedances.
Voltage fluctuations degrade the performance of the equipment and cause instability of the internal voltages and currents of electronic equipment. However, voltage fluctuations less than 10% do not affect electronic equipment. The main causes of voltage fluctuation are pulsed-power output, resistance welders, start-up of drives, arc furnaces, drives with rapidly changing loads, and rolling mills.
Flicker
Flicker (Fig. 1.12) has been described as “continuous and rapid variations in the load current magnitude which causes voltage variations.” The term flicker is derived from the impact of the voltage fluctuation on lamps such that they are perceived to flicker by the human eye. This may be caused by an arc furnace, one of the most common causes of the voltage fluctuations in utility transmission and distribution systems.

1.3.7 Power–Frequency Variations
The deviation of the power system fundamental frequency from its specified nominal value (e.g., 50 or 60 Hz) is defined as power frequency variation [39]. If the balance between generation and demand (load) is not maintained, the frequency of the power system will deviate because of changes in the rotational speed of electromechanical generators. The amount of deviation and its duration of the frequency depend on the load characteristics and response of the generation control system to load changes. Faults of the power transmission system can also cause frequency variations outside of the accepted range for normal steady-state operation of the power system.
1.4 Formulations and measures used for power quality
This section briefly introduces some of the most commonly used formulations and measures of electric power quality as used in this book and as defined in standard documents. Main sources for power quality terminologies are IEEE Std 100 [40], IEC Std 61000-1-1, and CENELEC Std EN 50160 [24,41]. Appendix C of reference [11] presents a fine survey of power quality definitions.
1.4.1 Harmonics
Nonsinusoidal current and voltage waveforms (Figs. 1.13 to 1.20) occur in today’s power systems due to equipment with nonlinear characteristics such as transformers, rotating electric machines, FACTS devices, power electronics components (e.g., rectifiers, triacs, thyristors, and diodes with capacitor smoothing, which are used extensively in PCs, audio, and video equipment), switch-mode power supplies, compact fluorescent lamps, induction furnaces, adjustable AC and DC drives, arc furnaces, welding tools, renewable energy sources, and HVDC networks. The main effects of harmonics are maloperation of control devices, telephone interferences, additional line losses (at fundamental and harmonic frequencies), and decreased lifetime and increased losses in utility equipment (e.g., transformers, rotating machines, and capacitor banks) and customer devices.







The periodic nonsinusoidal waveforms can be formulated in terms of Fourier series. Each term in the Fourier series is called the harmonic component of the distorted waveform. The frequency of harmonics are integer multiples of the fundamental frequency. Therefore, nonsinusoidal voltage and current waveforms can be defined as


where ωo is the fundamental frequency, h is the harmonic order, and Vrms(h), Irms(h), αh, and βh are the rms amplitude values and phase shifts of voltage and current for the hth harmonic.
Even and odd harmonics of a nonsinusoidal function correspond to even (e.g., 2, 4, 6, 8, …) and odd (e.g., 3, 5, 7, 9, …) components of its Fourier series. Harmonics of order 1 and 0 are assigned to the fundamental frequency and the DC component of the waveform, respectively. When both positive and negative half-cycles of the waveform have identical shapes, the wave shape has half-wave symmetry and the Fourier series contains only odd harmonics. This is the usual case with voltages and currents of power systems. The presence of even harmonics is often a clue that there is something wrong (e.g., imperfect gating of electronic switches [42]), either with the load equipment or with the transducer used to make the measurement. There are notable exceptions to this such as half-wave rectifiers, arc furnaces (with random arcs), and the presence of GICs in power systems [27].
Triplen Harmonics
Triplen harmonics (Fig. 1.21) are the odd multiples of the third harmonic (h = 3, 9, 15, 21, …). These harmonic orders become an important issue for grounded-wye systems with current flowing in the neutral line of a wye configuration. Two typical problems are overloading of the neutral conductor and telephone interference.

For a system of perfectly balanced three-phase nonsinusoidal loads, fundamental current components in the neutral are zero. The third harmonic neutral currents are three times the third-harmonic phase currents because they coincide in phase or time.
Transformer winding connections have a significant impact on the flow of triplen harmonic currents caused by three-phase nonlinear loads. For the grounded wye-delta transformer, the triplen harmonic currents enter the wye side and since they are in phase, they add in the neutral. The delta winding provides ampere-turn balance so that they can flow in the delta, but they remain trapped in the delta and are absent in the line currents of the delta side of the transformer. This type of transformer connection is the most commonly employed in utility distribution substations with the delta winding connected to the transmission feeder. Using grounded-wye windings on both sides of the transformer allows balanced triplen harmonics to flow unimpeded from the low-voltage system to the high-voltage system. They will be present in equal proportion on both sides of a transformer.
Subharmonics
Subharmonics have frequencies below the fundamental frequency. There are rarely subharmonics in power systems. However, due to the fast control of electronic power supplies of computers, inter- and subharmonics are generated in the input current (Fig. 1.11) [45]. Resonance between the harmonic currents or voltages with the power system (series) capacitance and inductance may cause subharmonics, called subsynchronous resonance [46]. They may be generated when a system is highly inductive (such as an arc furnace during start-up) or when the power system contains large capacitor banks for power factor correction or filtering.
Interharmonics
The frequency of interharmonics are not integer multiples of the fundamental frequency. Interharmonics appear as discrete frequencies or as a band spectrum. Main sources of interharmonic waveforms are static frequency converters, cycloconverters, induction motors, arcing devices, and computers. Interharmonics cause flicker, low-frequency torques [32], additional temperature rise in induction machines [33,34], and malfunctioning of protective (under-frequency) relays [35]. Interharmonics have been included in a number of guidelines such as the IEC 61000-4-7 [36] and the IEEE-519. However, many important related issues, such as the range of frequencies, should be addressed in revised guidelines.
Characteristic and Uncharacteristic Harmonics
The harmonics of orders 12 k + 1 (positive sequence) and 12 k – 1 (negative sequence) are called characteristic and uncharacteristic harmonics, respectively. The amplitudes of these harmonics are inversely proportional to the harmonic order. Filters are used to reduce characteristic harmonics of large power converters. When the AC system is weak [47] and the operation is not perfectly symmetrical, uncharacteristic harmonics appear. It is not economical to reduce uncharacteristic harmonics with filters; therefore, even a small injection of these harmonic currents can, via parallel resonant conditions, produce very large voltage distortion levels.
Positive-, Negative-, and Zero-Sequence Harmonics [48]
Assuming a positive-phase (abc) sequence balanced three-phase power system, the expressions for the fundamental currents are

The negative displacement angles indicate that the fundamental phasors rotate clockwise in the space–time plane.
For the third harmonic (zero-sequence) currents,

This equation shows that the third harmonic phasors are in phase and have zero displacement angles between them. The third harmonic currents are known as zero-sequence harmonics.
The expressions for the fifth harmonic currents are

Note that displacement angles are positive; therefore, the phase sequence of this harmonic is counterclockwise and opposite to that of the fundamental. The fifth harmonic currents are known as negative-sequence harmonics.
Similar relationships exist for other harmonic orders. Table 1.3 categorizes power system harmonics in terms of their respective frequencies and sources.
Table 1.3
Types and Sources of Power System Harmonics
| Type | Frequency | Source |
| DC | 0 | Electronic switching devices, half-wave rectifiers, arc furnaces (with random arcs), geomagnetic induced currents (GICs) |
| Odd harmonics | h • f1 (h = odd) | Nonlinear loads and devices |
| Even harmonics | h • f1 (h = even) | Half-wave rectifiers, geomagnetic induced currents (GICs) |
| Triplen harmonics | 3 h • f1 (h = 1, 2, 3, 4, …) | Unbalanced three-phase load, electronic switching devices |
| Positive-sequence harmonics | h • f1 (h = 1, 4, 7, 10, …) | Operation of power system with nonlinear loads |
| Negative-sequence harmonics | h • f1 (h = 2, 5, 8, 11, …) | Operation of power system with nonlinear loads |
| Zero-sequence harmonics | h • f1 (h = 3, 6, 9, 12, …)(same as triplen harmonics) | Unbalanced operation of power system |
| Time harmonics | h • f1 (h = an integer) | Voltage and current source inverters, pulse-width-modulated rectifiers, switch-mode rectifiers and inverters |
| Spatial harmonics | h • f1 (h = an integer) | Induction machines |
| Interharmonic | h • f1 (h = not an integer multiple of f1) | Static frequency converters, cycloconverters, induction machines, arcing devices, computers |
| Subharmonic | h • f1 (h < 1 and not an integer multiple of f1, e.g., h = 15 Hz, 30 Hz) | Fast control of power supplies, subsynchronous resonances, large capacitor banks in highly inductive systems, induction machines |
| Characteristic harmonic | (12 k + 1) • f1 (k = integer) | Rectifiers, inverters |
| Uncharacteristic harmonic | (12 k – 1) • f1 (k = integer) | Weak and unsymmetrical AC systems |

Note that although the harmonic phase-shift angle has the effect of altering the shape of the composite waveform (e.g., adding a third harmonic component with 0 degree phase shift to the fundamental results in a composite waveform with maximum peak-to-peak value whereas a 180 degree phase shift will result in a composite waveform with minimum peak-to-peak value), the phase–sequence order of the harmonics is not affected. Not all voltage and current systems can be decomposed into positive-, negative-, and zero-sequence systems [49].
Time and Spatial (Space) Harmonics
Time harmonics are the harmonics in the voltage and current waveforms of electric machines and power systems due to magnetic core saturation, presence of nonlinear loads, and irregular system conditions (e.g., faults and imbalance). Spatial (space) harmonics are referred to the harmonics in the flux linkage of rotating electromagnetic devices such as induction and synchronous machines. The main cause of spatial harmonics is the unsymmetrical physical structure of stator and rotor magnetic circuits (e.g., selection of number of slots and rotor eccentricity). Spatial harmonics of flux linkages will induce time harmonic voltages in the rotor and stator circuits that generate time harmonic currents.
1.4.2 The Average Value of a Nonsinusoidal Waveform
The average value of a sinusoidal waveform is defined as

For the nonsinusoidal current of Eq. 1-1,

Since all harmonics are sinusoids, the average value of a nonsinusoidal function is equal to its DC value:
1.4.3 The rms Value of a Nonsinusoidal Waveform
The rms value of a sinusoidal waveform is defined as

For the nonsinusoidal current of Eq. 1-1,

This equation contains two parts:
• The first part is the sum of the squares of harmonics:

• The second part is the sum of the products of harmonics:

After some simplifications it can be shown that the average of the second part is zero, and the first part becomes

Therefore, the rms value of a nonsinusoidal waveform is

If the nonsinusoidal waveform contains DC values, then

1.4.4 Form Factor (FF)
The form factor (FF) is a measure of the shape of the waveform and is defined as

Since the average value of a sinusoid is zero, its average over one half-cycle is used in the above equation. As the harmonic content of the waveform increases, its FF will also increase.
1.4.5 Ripple Factor (RF)
Ripple factor (RF) is a measure of the ripple content of the waveform and is defined as

where ![]() It is easy to show that
It is easy to show that

1.4.6 Harmonic Factor (HFh)
The harmonic factor (HFh) of the hth harmonic, which is a measure of the individual harmonic contribution, is defined as

Some references [8] call HFh the individual harmonic distortion (IHD).
1.4.7 Lowest Order Harmonic (LOH)
The lowest order harmonic (LOH) is that harmonic component whose frequency is closest to that of the fundamental and its amplitude is greater than or equal to 3% of the fundamental component.
1.4.8 Total Harmonic Distortion (THD)
The most common harmonic index used to indicate the harmonic content of a distorted waveform with a single number is the total harmonic distortion (THD). It is a measure of the effective value of the harmonic components of a distorted waveform, which is defined as the rms of the harmonics expressed in percentage of the fundamental (e.g., current) component:

A commonly cited value of 5% is often used as a dividing line between a high and low distortion level. The ANSI standard recommends truncation of THD series at 5 kHz, but most practical commercially available instruments are limited to about 1.6 kHz (due to the limited bandwidth of potential and current transformers and the word length of the digital hardware [5]).
Main advantages of THD are:
• It is commonly used for a quick measure of distortion; and
• It can be easily calculated.
Some disadvantages of THD are:
• It does not provide amplitude information; and
• The detailed information of the spectrum is lost.
THDi is related to the rms value of the current waveform as follows [6]:

THD can be weighted to indicate the amplitude stress on various system devices. The weighted distortion factor adapted to inductance is an approximate measure for the additional thermal stress of inductances of coils and induction motors [9, Table 2.4]:
THD adapted to inductance = THDind

where α = 1 … 2. On the other hand, the weighted THD adapted to capacitors is an approximate measure for the additional thermal stress of capacitors directly connected to the system without series inductance [9, Table 2.4]:
THD adapted to capacitor = THDcap

Because voltage distortions are maintained small, the voltage THDv nearly always assumes values which are not a threat to the power system. This is not the case for current; a small current may have a high THDi but may not be a significant threat to the system.
1.4.9 Total Interharmonic Distortion (TIHD)
This factor is equivalent to the (e.g., current) THDi, but is defined for interharmonics as [9]

where k is the total number of interharmonics and n is the total number of frequency bins present including subharmonics (e.g., interharmonic frequencies that are less than the fundamental frequency).
1.4.10 Total Subharmonic Distortion (TSHD)
This factor is equivalent to the (e.g., current) THDi, but defined for subharmonics [9]:

where s is the total number of frequency bins present below the fundamental frequency.
1.4.11 Total Demand Distortion (TDD)
Due to the mentioned disadvantages of THD, some standards (e.g., IEEE-519) have defined the total demand distortion factor. This term is similar to THD except that the distortion is expressed as a percentage of some rated or maximum value (e.g., load current magnitude), rather than as a percentage of the fundamental current:
1.4.12 Telephone Influence Factor (TIF)
The telephone influence factor (TIF), which was jointly proposed by Bell Telephone Systems (BTS) and the Edison Electric Institute (EEI) and is widely used in the United States and Canada, determines the influence of power systems harmonics on telecommunication systems. It is a variation of THD in which the root of the sum of the squares is weighted using factors (weights) that reflect the response of the human ear [5]:

where wi are the TIF weighting factors obtained by physiological and audio tests, as listed in Table 1.4. They also incorporate the way current in a power circuit induces voltage in an adjacent communication system.
Table 1.4
Telephone Influence (wi) and C-Message (ci) Weighting Factors [5]
| Harmonic order (h, f1 = 60 Hz) | TIF weights (wi) | C weights (ci) |
| 1 | 0.5 | 0.0017 |
| 2 | 10.0 | 0.0167 |
| 3 | 30.0 | 0.0333 |
| 4 | 105 | 0.0875 |
| 5 | 225 | 0.1500 |
| 6 | 400 | 0.222 |
| 7 | 650 | 0.310 |
| 8 | 950 | 0.396 |
| 9 | 1320 | 0.489 |
| 10 | 1790 | 0.597 |
| 11 | 2260 | 0.685 |
| 12 | 2760 | 0.767 |
| 13 | 3360 | 0.862 |
| 14 | 3830 | 0.912 |
| 15 | 4350 | 0.967 |
| 16 | 4690 | 0.977 |
| 17 | 5100 | 1.000 |
| 18 | 5400 | 1.000 |
| 19 | 5630 | 0.988 |
| 20 | 5860 | 0.977 |
| 21 | 6050 | 0.960 |
| 22 | 6230 | 0.944 |
| 23 | 6370 | 0.923 |
| 24 | 6650 | 0.924 |
| 25 | 6680 | 0.891 |
| 26 | 6790 | 0.871 |
| 27 | 6970 | 0.860 |
| 28 | 7060 | 0.840 |
| 29 | 7320 | 0.841 |
| 30 | 7570 | 0.841 |
| 31 | 7820 | 0.841 |
| 32 | 8070 | 0.841 |
| 33 | 8330 | 0.841 |
| 34 | 8580 | 0.841 |
| 35 | 8830 | 0.841 |
| 36 | 9080 | 0.841 |
| 37 | 9330 | 0.841 |
| 38 | 9590 | 0.841 |
| 39 | 9840 | 0.841 |
| 40 | 10090 | 0.841 |
| 41 | 10340 | 0.841 |
| 42 | 10480 | 0.832 |
| 43 | 10600 | 0.822 |
| 44 | 10610 | 0.804 |
| 45 | 10480 | 0.776 |
| 46 | 10350 | 0.750 |
| 47 | 10210 | 0.724 |
| 48 | 9960 | 0.692 |
| 49 | 9820 | 0.668 |
| 50 | 9670 | 0.645 |
| 55 | 8090 | 0.490 |
| 60 | 6460 | 0.359 |
| 65 | 4400 | 0.226 |
| 70 | 3000 | 0.143 |
| 75 | 1830 | 0.0812 |

1.4.13 C-Message Weights
The C-message weighted index is very similar to the TIF except that the weights ci are used in place of wi [5]:

where ci are the C-message weighting factors (Table 1.4) that are related to the TIF weights by wi = 5(i)(f0)ci. The C-message could also be applied to the bus voltage.
1.4.14 V · T and I · T Products
The THD index does not provide information about the amplitude of voltage (or current); therefore, BTS or the EEI use I · T and V · T products. The I · T and V · T products are alternative indices to the THD incorporating voltage or current amplitudes:


where the weights wi are listed in Table 1.4.
1.4.15 Telephone Form Factor (TFF)
Two weighting systems widely used by industry for interference on telecommunication system are [9]:
• the sophomoric weighting system proposed by the International Consultation Commission on Telephone and Telegraph System (CCITT) used in Europe, and
• the C-message weighting system proposed jointly by Bell Telephone Systems (BTS) and the Edison Electric Institute (EEI), used in the United States and Canada.
These concepts acknowledge that the harmonic effect is not uniform over the audio-frequency range and use measured weighting factors to account for this nonuniformity. They take into account the type of telephone equipment and the sensitivity of the human ear to provide a reasonable indication of the interference from each harmonic.
The BTS and EEI systems describe the level of harmonic interference in terms of the telephone influence factor (Eq. 1-26) or the C-message (Eq. 1-27), whereas the CCITT system uses the telephone form factor (TFF):

where Kh = h/800 is a coupling factor and Ph is the harmonic weight [9 (Fig. 2.5)] divided by 1000.
1.4.16 Distortion Index (DIN)
The distortion index (DIN) is commonly used in standards and specifications outside North America. It is also used in Canada and is defined as [5]

For low levels of harmonics, a Taylor series expansion can be applied to show

1.4.17 Distortion Power (D)
Harmonic distortion complicates the computation of power and power factors because voltage and current equations (and their products) contain harmonic components. Under sinusoidal conditions, there are four standard quantities associated with power:
• Fundamental apparent power (S1) is the product of the rms fundamental voltage and current;
• Fundamental active power (P1) is the average rate of delivery of energy;
• Fundamental reactive power (Q1) is the portion of the apparent power that is oscillatory; and
• Power factor at fundamental frequency (or displacement factor) cos θ1 = P1/S1.
The relationship between these quantities is defined by the power triangle:
If voltage and current waveforms are nonsinusoidal (Eq. 1-1), the above equation does not hold because S contains cross terms in the products of the Fourier series that correspond to voltages and currents of different frequencies, whereas P and Q correspond to voltages and currents of the same frequency. It has been suggested to account for these cross terms as follows [5,50,51]:
where
Apparent power = S = VrmsIrms




Also, the fundamental power factor (displacement factor) in the case of sinusoidal voltage and nonsinusoidal currents is defined as [8]

and the harmonic displacement factor is defined as [8]

The power and displacement factor quantities are shown in addition to the power quantities in Fig. 1.22. A detailed comparison of various definitions of the distortion power D is given in reference [51].

1.4.18 Application Example 1.1: Calculation of Input/Output Currents and Voltages of a Three-Phase Thyristor Rectifier
The circuit of Fig. E1.1.1 represents a phase-controlled, three-phase thyristor rectifier. The balanced input line-to-line voltages are vab = ![]() sin ωt, vbc =
sin ωt, vbc = ![]() sin(ωt – 120°), and vca =
sin(ωt – 120°), and vca = ![]() sin(ωt – 240°), where ω = 2πf and f = 60 Hz. Each of the six thyristors can be modeled by a self-commutated electronic switch and a diode in series, as is illustrated in Fig. E1.1.2. Use the following PSpice models for the MOSFET and the diode:
sin(ωt – 240°), where ω = 2πf and f = 60 Hz. Each of the six thyristors can be modeled by a self-commutated electronic switch and a diode in series, as is illustrated in Fig. E1.1.2. Use the following PSpice models for the MOSFET and the diode:


• Model for self-commutated electronic switch (MOSFET):
.model SMM NMOS(Level = 3 Gamma = 0
+ Delta = 0 Eta = 0 Theta = 0 Kappa = 0 Vmax = 0
+ XJ = 0 TOX = 100 N UO = 600 PHI = 0.6 RS = 42.69 m KP = 20.87 u L = 2 u
+ W = 2.9 VTO = 3.487 RD = 0.19 CBD = 200 n PB = 0.8 MJ = 0.5 CGSO = 3.5 n
+ CGDO = 100 p RG = 1.2 IS = 10 f)
• Model for diode:
The parameters of the circuit are as follows:
• System resistance and inductance Lsyst = 300 μH, Rsyst = 0.05 Ω;
• Load resistance Rload = 10 Ω;
• Filter capacitance and inductance Cf = 500 μF, Lf = 5 mH;
• Snubber inductance Ls = 5 nH;
Note that R3 must be nonzero because PSpice cannot accept three voltage sources connected within a loop.
Perform a PSpice analysis plotting input line-to-line voltages vab, vbc, vca, Vab, vBC, vca, input currents ia, ib, ic, and the rectified output voltage vload and output current iload for α = 0° during the time interval 0 ≤ t ≤ 60 ms. Print the input program. Repeat the computation for α = 50° and α = 150°.
Solution to Application Example 1.1
The PSpice program codes are provided in Table E1.1.1. Plots of input current ia (top), line-to-line voltage vAB (second from top), line-to-line voltages vab, vbc, vca, and output voltage vload for a firing angle of α = 50° are shown in Fig. E1.1.3.
Table E1.1.1
PSpice Program Codes for Application Example 1.1
| *thyristor rectifier Va 1 2 SIN(0 V 339.41 V 60Hz 0 0) Vb 2 3 SIN(0 V 339.41 V 60Hz 5.556 m 0) Vc 3 3a SIN(0 V 339.41 V 60Hz 11.111 m 0) R3 3a 1 0.01 Rarb 14 0 0.01 *5 deg delay = 0.231 ms *50 deg delay = 2.31 ms *150 deg delay = 6.94 ms *Vfet1 sp1 A1 pulse(0 15 + 0.231 m 1u 1u 9 m + 16.667 ms) *Vfet2 sp2 A2 pulse(0 15 + 3.01 m 1u 1u 9 m + 16.667 ms) *Vfet3 sp3 A3 pulse(0 15 + 5.79 m 1u 1u 9 m + 16.667 ms) *Vfet4 sp4 A4 pulse(0 15 + 8.56 m 1u 1u 9 m + 16.667 ms) *Vfet5 sp5 A5 pulse(0 15 + 11.32 m 1u 1u 9 m + 16.667 ms) *Vfet6 sp6 A6 pulse(0 15 + 14.12 m 1u 1u 9 m + 16.667 ms) Vfet1 sp1 A1 pulse(0 15 + 2.31 m 1u 1u 9 m + 16.667 ms) Vfet2 sp2 A2 pulse(0 15 + 5.089 m 1u 1u 9 m + 16.667 ms) Vfet3 sp3 A3 pulse(0 15 + 7.869 m 1u 1u 9 m + 16.667 ms) Vfet4 sp4 A4 pulse(0 15 + 10.639 m 1u 1u 9 m + 16.667 ms) Vfet5 sp5 A5 pulse(0 15 + 13.399 m 1u 1u 9 m + 16.667 ms) Vfet6 sp6 A6 pulse(0 15 + 16.199 m 1u 1u 9 m + 16.667 ms) *Vfet1 sp1 A1 pulse(0 15 + 6.94 m 1u 1u 9 m + 16.667 ms) *Vfet2 sp2 A2 pulse(0 15 + 9.72 m 1u 1u 9 m + 16.667 ms) *Vfet3 sp3 A3 pulse(0 15 + 12.50 m 1u 1u 9 m + 16.667 ms) *Vfet4 sp4 A4 pulse(0 15 + 15.27 m 1u 1u 9 m + 16.667 ms) *Vfet5 sp5 A5 pulse(0 15 + 18.04 m 1u 1u 9 m + 16.667 ms) *Vfet6 sp6 A6 pulse(0 + 15 20.83 m 1u 1u 9 m + 16.667 ms) RAB 7 8 10Meg M1 7 sp1 A1 A1 SMM M2 14 sp2 A2 A2 SMM M3 8 sp3 A3 A3 SMM M4 14 sp4 A4 A4 SMM M5 9 sp5 A5 A5 SMM M6 14 sp6 A6 A6 SMM La 1 4 300uH Ra 4 7 0.05 Lb 2 5 300uH Rb 5 8 0.05 Lc 3 6 300uH Rc 6 9 0.05 d1 A1 13 D1N4001 d2 A2 12 D1N4001 L2 12 9 5nH d3 A3 13 D1N4001 d4 A4 10 D1N4001 L4 10 7 5nH d5 A5 13 D1N4001 d6 A6 11 D1N4001 L6 11 8 5nH Lf 13 15 5 mH Cf 15 14 500u R1 15 14 10 .model D1N4001 D(IS=1E–12) .model SMM nmos(level=3 gamma=0 + delta=0 eta=0 theta=0 + kappa=0 vmax=0 xj=0 tox=100n uo=600 phi=0.6 rs=42.69 M kp=20.87u + l=2u w=2.9 vto=3.487 rd=0.19 + cbd=200n pb=0.8 mj=0.5 cgso=3.5n + cgdo=100p rg=1.2 is=10f) .tran 0.01u 60 m 30 m uic .options abstol=1 m chgtol=1 m reltol=10 m vntol=10 m gmin=1 m .four 60 I(ra) V(RAB) .probe .end |


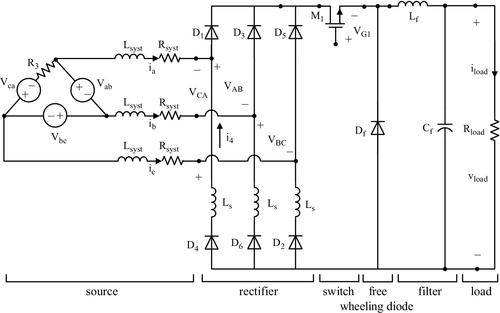
1.4.19 Application Example 1.2: Calculation of Input/Output Currents and Voltages of a Three-Phase Rectifier with One Self-Commutated Electronic Switch
An inexpensive and popular rectifier is illustrated in Fig. E1.2.1. It consists of four diodes and one self-commutated electronic switch operated at, for example, fswitch = 600 Hz. The balanced input line-to-line voltages are vab = ![]() sin ωt, vbc =
sin ωt, vbc = ![]() sin(ωt – 120°), and vca =
sin(ωt – 120°), and vca = ![]() sin(ωt – 240°), where ω = 2πf and f = 60 Hz. Perform a PSpice analysis. Use the following PSpice models for the MOSFET and the diodes:
sin(ωt – 240°), where ω = 2πf and f = 60 Hz. Perform a PSpice analysis. Use the following PSpice models for the MOSFET and the diodes:
• Model for self-commutated electronic switch (MOSFET):
. MODEL SMM NMOS(LEVEL = 3 GAMMA = 0 DELTA = 0 ETA = 0 THETA = 0
+ KAPPA = 0 VMAX = 0 XJ = 0 TOX = 100 n UO = 600 PHI = 0.6 RS = 42.69 M + KP = 20.87 u
+ L = 2 u W = 2.9 VTO = 3.487 RD = 0.19 CBD = 200 n PB = 40.8 MJ = 0.5 + CGSO = 3.5 n
+ CGDO = 100 p RG = 1.2 IS = 10 f)
• Model for diode:
The parameters of the circuit are as follows:
• System resistance and inductance Lsyst = 10 mH, Rsyst = 0.05 Ω;
• Load resistance Rload = 10 Ω;
• Filter capacitance and inductance Cf = 500 μF, Lf = 5 mH; and
• Snubber inductance Ls = 5 nH.
Note that R3 must be nonzero because PSpice cannot accept three voltage sources connected within a loop. The freewheeling diode is required to reduce the voltage stress on the self-commutated switch.
Print the PSpice input program. Perform a PSpice analysis plotting input line-to-line voltages vab, vbc, vca, vAB, vbc, vca ,input currents ia, ib, ic, and the rectified output voltage vload and output current iload for a duty ratio of δ = 50% during the time interval 0 ≤ t ≤ 60 ms.
Solution to Application Example 1.2
The PSpice program codes are provided in Table E1.2.1. Plots of input line current ia (top), line-to-line voltage vAB with (extreme) commutating notches (second from top), line-to-line voltages vab, vbc, and vca are shown in Fig. E1.2.2.
Table E1.2.1
PSpice Program Codes for Application Example 1.2
| *rectifier with one self- + commutated switch Va 1 2 SIN(0 V 339.41 V + 60Hz 0 0) Vb 2 3 SIN(0 V 339.41 V + 60Hz 5.56 m 0) Vc 3 3a SIN(0 V 339.41 V + 60Hz 11.11 m 0) R3 3a 1 0.1 Rarb 14 0 0.1 RAB 7 8 10Meg Vfet sp 15 pulse(0 15 0 1u 1u 833u 1.67 m) M1 13 sp 15 15 SMM La 1 4 10 mH Ra 4 7 0.05 Lb 2 5 10 mH Rb 5 8 0.05 Lc 3 6 10 mH Rc 6 9 0.05 d1 7 13 D1N4001 d2 14 12 D1N4001 L2 12 9 5nH d3 8 13 D1N4001 d4 14 10 D1N4001 L4 10 7 5nH d5 9 13 D1N4001 d6 14 11 D1N4001 L6 11 8 5nH Df 14 15 D1N4001 Lf 15 16 5 mH Cf 16 14 500u R1 16 14 10 .model D1N4001 D(IS = 1E–12) .model SMM nmos(level = 3 gamma = 0 + delta = 0 eta = 0 theta = 0 + kappa = 0 vmax = 0 xj = 0 tox = 100n + uo = 600 phi = 0.6 rs = 42.69 M kp = 20.87u + l = 2u w = 2.9 vto = 3.487 rd = 0.19 + cbd = 200n pb = 0.8 mj = 0.5 cgso = 3.5n + cgdo = 100p rg = 1.2 is = 10f) .tran .010u 60 m 30 m uic .options abstol = 1 m chgtol = 1 m + reltol = 10 m vntol = 10 m gmin = 1 m .four 60 I(ra) V(RAB) .probe .end |


1.4.20 Application Example 1.3: Calculation of Input Currents of a Brushless DC Motor in Full-on Mode (Three-Phase Permanent-Magnet Motor Fed by a Six-Step Inverter)
In the drive circuit of Fig. E1.3.1 the DC input voltage is VDC = 300 V. The inverter is a six-pulse or six-step or full-on inverter consisting of six self-commutated (e.g., MOSFET) switches. The electric machine is a three-phase permanent-magnet motor represented by induced voltages (eA, eB, eC), resistances, and leakage inductances (with respect to stator phase windings) for all three phases. The induced voltage of the stator winding (phase A) of the permanent-magnet motor is
where ω = 2πf1 and f1 = 1500 Hz. Correspondingly,

The resistance R1 and the leakage inductance L1ℓ of one of the phases are 0.5 Ω and 50 μH, respectively.
The magnitude of the gating voltages of the six MOSFETs is VGmax = 15 V. The gating signals with their phase sequence are shown in Fig. E1.3.2. Note that the phase sequence of the induced voltages (eA, eB, eC) and that of the gating signals (see Fig. E1.3.2) must be the same. If these phase sequences are not the same, then no periodic solution for the machine currents (iMA, iMB, iMC) can be obtained.

The models of the enhancement metal-oxide semiconductor field-effect transistors and those of the (external) freewheeling diodes are as follows:
• Model for self-commutated electronic switch (MOSFET):
.MODEL SMM NMOS(LEVEL = 3 GAMMA = 0
+ DELTA = 0 ETA = 0 THETA = 0
+ KAPPA = 0 VMAX = 0 XJ = 0 TOX = 100 n UO = 600 PHI = 0.6 RS = 42.69 M + KP = 20.87 u
+ L = 2 u W = 2.9 VTO = 3.487 RD = 0.19 CBD = 200 n PB = 0.8 MJ = 0.5 + CGSO = 3.5 n
+ CGDO = 100 p RG = 1.2 IS = 10 f)
• Model for diode:
a) Using PSpice, compute and plot the current of MOSFET QAu (e.g., iqau) and the motor current of phase A (e.g., iMA) for the phase angles of the induced voltages θ = 0°, θ = + 30°, θ = + 60°, θ = –30°, and θ = –60°. Note that the gating signal frequency of the MOSFETs corresponds to the frequency f1, that is, full-on mode operation exists. For switching sequence see Fig. E1.3.2.
b) Repeat part a for θ = + 30° with reversed-phase sequence.
Note the following:
• The step size for the numerical solution should be in the neighborhood of Δt = 0.05 μs; and
• To eliminate computational transients due to inconsistent initial conditions compute at least three periods of all quantities and plot the last (third) period of iqau and iMA for all five cases, where θ assumes the values given above.
Solution to Application Example 1.3
a) The PSpice program codes are provided in Table E1.3.1. Plots of MOSFET and motor currents for phase angles of θ = 0°, 30°, 60° and -60°are shown in Figs. E1.3.3a to E1.3.3d.
Table E1.3.1
PSpice Program Codes for Application Example 1.3
| *brushless DC motor drive: (e_subscript_A = Va, e_subscript_B = Vb, e_subscript_C = Vc) Va 1a st SIN(0 160 V 1500Hz 0 0 60) Vb 3a st SIN(0 160 V 1500Hz 0 0 180) Vc 5a st SIN(0 160 V 1500Hz 0 0 300) Vdc1 7 0 DC 150 V Vdc2 8 0 DC -150 Rshunt st 0 10Meg *5 deg delay = 0.231 ms *50 deg delay = 2.31 ms *150 deg delay = 6.94 ms Vfet1 sp1 2 pulse(0 15 0 1u 1u + 222.22us 666.66us) Vfet2 sp2 6 pulse(0 15 222.22us + 1u 1u 222.22us 666.66us) Vfet3 sp3 4 pulse(0 15 444.44us + 1u 1u 222.22us 666.66us) Vfet4 sp4 8 pulse(0 15 333.33us + 1u 1u 222.22us 666.66us) Vfet5 sp5 8 pulse(0 15 555.51us + 1u 1u 222.22us 666.66us) Vfet6 sp6 8 pulse(0 15 111.11us + 1u 1u 222.22us 666.66us) Mau 7 sp1 2 2 SMM Mbu 7 sp2 6 6 SMM Mcu 7 sp3 4 4 SMM Mal 2 sp4 8 8 SMM Mbl 6 sp5 8 8 SMM Mcl 4 sp6 8 8 SMM L1 1a 1 50u R1 1 2 0.5 L3 3a 3 50u R3 3 4 0.5 L5 5a 5 50u R5 5 6 0.5 C1 7 0 100u C2 0 8 100u Dau 2 7 D1N4001 Dbu 6 7 D1N4001 Dal 8 2 D1N4001 Dbl 8 6 D1N4001 Dcu 4 7 D1N4001 Dcl 8 4 D1N4001 .model D1N4001 D(IS=1E–12) .model SMM nmos(level=3 gamma=0 + delta=0 eta=0 theta=0 + kappa=0 vmax=0 xj=0 tox=100n + uo=600 phi=0.6 rs=42.69 m kp=20.87u + l=2u w=2.9 vto=3.487 rd=0.19 + cbd=200n pb=0.8 mj=0.5 cgso=3.5n + cgdo=100p rg=1.2 is=10f) .tran 0.05u 2 m uic .options abstol=1 m chgtol=1 m + reltol=10 m vntol=10 m .four 1500 I(L1) .probe .end |





b) The reversed-phase: (e.g., where e_subscript_A and e_subscript_B are interchanged) sequence will result in nonperiodic waveshapes, and thus this solution is not meaningful.
1.4.21 Application Example 1.4: Calculation of the Efficiency of a Polymer Electrolyte Membrane (PEM) Fuel Cell Used as Energy Source for a Variable-Speed Drive
a) Calculate the power efficiency of a PEM fuel cell.
b) Find the specific power density of this PEM fuel cell expressed in W/kg-force.
c) How does this specific power density compare with that of a lead–acid battery [66]?
Hints:
• The nominal energy density of hydrogen is 28 kWh/kg-force, which is significantly larger than that of gasoline (12.3 kWh/kg-force). This makes hydrogen a desirable fuel for automobiles.
• The weight density of hydrogen is γ = 0.0899 g-force/liter.
• The oxygen atom has 8 electrons, 8 protons, and 8 neutrons.
A PEM fuel cell as specified by [65] has the following parameters:
| Performance: | Output power: Prat = 1200 Wa |
| Output current: Irat = 46 Aa | |
| DC voltage range: Vrat = 22 to 50 V | |
| Operating lifetime: Tlife = 1500 hb | |
| Fuel: | Composition: C = 99.99% dry gaseous hydrogen |
| Supply pressure: p = 10 to 250 PSIG | |
| Consumption: V = 18.5 SLPMc | |
| Operating environment: | Ambient temperature: tamb = 3 to 30 °C |
| Relative humidity: RH = 0 to 95% | |
| Location: Indoors and outdoorsd | |
| Physical: | Length · width · height: (56)(25)(33) cm |
| Weight: W = 13 kg-force | |
| Emissions: | Liquid water: H2O = 0.87 liters maximum per hour. |
a Beginning of life, sea level, rated temperature range.
b CO within the air (which provides the oxygen) destroys the proton exchange membrane.
c At rated power output, SLPM ≡ standard liters per minute (standard flow).
d Unit must be protected from inclement weather, sand, and dust.
Solution to Application Example 1.4
a) The power efficiency is defined by
Method #1. The PEM fuel cell generates 0.87 liters or 0.87 kg-force of water per hour by converting hydrogen and oxygen according to the relation
The atomic weights are

The required weight of hydrogen to generate 0.87 liters of water per hour is ![]() × 0.87 kg-force = 0.09658 kg-force. The energy input per hour in form of hydrogen is (0.09658 kg-force)(28 kWh/kg-force) = 2704.26 Wh.
× 0.87 kg-force = 0.09658 kg-force. The energy input per hour in form of hydrogen is (0.09658 kg-force)(28 kWh/kg-force) = 2704.26 Wh.
Output (electrical) power of PEM fuel cell Pout = 1200 W.
Input (hydrogen) power (or energy per hour) of PEM fuel cell Pin = 2704.26 W.
Power (energy per hour) efficiency ηpower = Pout/Pin = 0.4437 pu ≈ 44.4%.
Method #2. Hydrogen input power of PEM fuel cell is

With (hydrogen consumption during one hour) = 18.5 SLPM × 60 minutes/hour = (18.5)(60) liters/hour = 1110 liters/hour, one obtains the input power in form of hydrogen:
Pin = (0.0899·10–3 kg-force /liter) (1110 liters/hour) (28·103 W/kg-force) = 2794 W.
Power (energy per hour) efficiency
ηpower = Pout/Pin = 0.4295 pu ≈ 43%.
Conclusion. Both methods generate about the same efficiency for a PEM fuel cell.
b) The specific power density of this PEM fuel cell expressed in W/kg-force is defined as

c) The specific power density of a PEM fuel cell is 92.3 W/kg-force as compared with that of a lead-acid battery of about 150 W/kg-force [66].
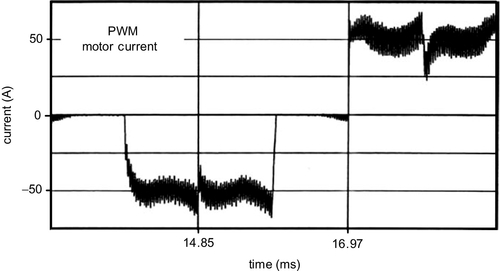
1.4.22 Application Example 1.5: Calculation of the Currents of a Wind-Power Plant PWM Inverter Feeding Power into the Power System
The circuit diagram of PWM inverter feeding power into the 240 VL-L three-phase utility system is shown in Fig. E1.5.1 consisting of DC source, inverter, filter, and power system. The associated control circuit is given by a block diagram in Fig. E1.5.2.
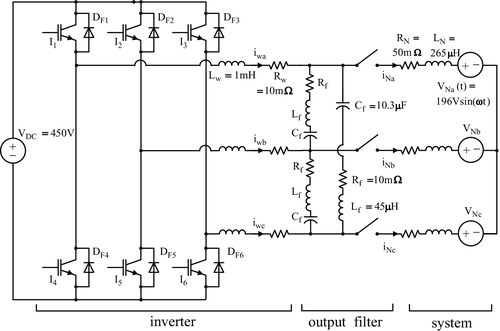

Use the PSpice program (windpower.cir) listed in Table E1.5.1.
Table E1.5.1
PSpice Program Codes for Application Example 1.5
| *windpower.cir; Is=40Arms, + VDC=450 V, phi=30 VDCsupply 2 0 450 ***switches msw1 2 11 10 10 Mosfet dsw1 10 2 diode msw2 2 21 20 20 Mosfet dsw2 20 2 diode msw3 2 31 30 30 Mosfet dsw3 30 2 diode msw4 10 41 0 0 Mosfet dsw4 0 10 diode msw5 20 51 0 0 Mosfet dsw5 0 20 diode msw6 30 61 0 0 Mosfet dsw6 0 30 diode *** inductors L_W1 10 15 1 m L_W2 20 25 1 m L_W3 30 35 1 m *** resistors or voltage sources for + measuring current R_W1 15 16 10 m R_W2 25 26 10 m R_W3 35 36 10 m ***voltages serve as reference currents vref1 12 0 sin (0 56.6 60 0 0 0) vref2 22 0 sin (0 56.6 60 0 0 –120) vref3 32 0 sin (0 56.6 60 0 0 –240) *** voltages derived from load currents (measured with shunts) eout1 13 0 15 16 100 eout2 23 0 25 26 100 eout3 33 0 35 36 100 *** error signals derived from the + difference between vref and eout rdiff1 12 13a 1 k rdiff2 22 23a 1 k rdiff3 32 33a 1 k cdiff1 12 13a 1u cdiff2 22 23a 1u cdiff3 32 33a 1u rdiff4 13a 13 1 k rdiff5 23a 23 1 k rdiff6 33a 33 1 k ecin1 14 0 12 13a 2 |
| ecin2 24 0 22 23a 2 ecin3 34 0 32 33a 2 vtriangular 5 0 pulse (–10 10 0 + 86.5u 86.5u 0.6u 173.6u) *** gating signals for upper switches (mosfets) as a result of + comparison between triangular voltage and error signals xgs1 14 5 11 10 comp xgs2 24 5 21 20 comp xgs3 34 5 31 30 comp *** gating of lower switches egs4 41 0 poly(1) (11, 10) 50 –1 egs5 51 0 poly(1) (21, 20) 50 –1 egs6 61 0 poly(1) (31, 30) 50 –1 *** filter must be removed because of node limit of 64 for PSpice, not + required for Spice lfi1 16 15b 45u lfi2 26 25b 45u lfi3 36 35b 45u rfi1 15b 15c 0.01 rfi2 25b 25c 0.01 rfi3 35b 35c 0.01 cfi1 15c 26 10.3u cfi2 25c 36 10.3u cfi3 35c 16 10.3u *** representation of utility system RM1 16 18 50 m LM1 18 19 265u Vout1 19 123 sin(0 196 60 0 0 –30) RM2 26 28 50 m LM2 28 29 265u Vout2 29 123 sin(0 196 60 0 0 –150) RM3 36 38 50 m LM3 38 39 265u Vout3 39 123 sin(0 196 60 0 0 –270) **** comparator: v1-v2, vgs .subckt comp 1 2 9 10 rin 1 3 2.8 k r1 3 2 20meg e2 4 2 3 2 50 r2 4 5 1 k d1 5 6 zenerdiode1 d2 2 6 zenerdiod2 e3 7 2 5 2 1 r3 7 8 10 c3 8 2 10n r4 3 8 100 k e4 9 10 8 2 1 .model zenerdiode1 D (Is=1p BV=0.1) .model zenerdiode2 D (Is=1p BV=50) .ends comp *** models .model Mosfet nmos(level=3 gamma=0 kappa=0 tox=100n rs=42.69 m + kp=20.87u + l=2u w=2.9 delta=0 eta=0 theta=0 vmax=0 xj=0 uo=600 phi=0.6 + vto=3.487 rd=0.19 cbd=200n pb=0.8 mj=0.5 cgso=3.5n cgdo=100p + rg=1.2 is=10f) .model diode d(is=1p) ***options .options abstol=0.01 m chgtol = 0.01 m + reltol=50 m vntol=1 m itl5=0 itl4=200 ***analysis request .tran 5u 35 m 16.67 m 5u ***prepare for plotting .probe ***final statement .end |


a) Use “reverse” engineering and identify the nodes of Figs. E1.5.1 and E1.5.2, as used in the PSpice program. It may be advisable that you draw your own detailed circuit.
b) Study the PSpice program wr.cir. In particular it is important that you understand the poly statements and the subcircuit for the comparator. You may ignore the statements for the filter between switch and inverter (see Fig. E1.5.1) if the node number exceeds the maximum number of 64 (note the student version of the PSpice program is limited to a maximum of 64 nodes).
c) Run this program with inverter inductance values of Lw = 1 mH for a DC voltage of VDC = 450 V.
d) Plot the current supplied by the inverter to the power system I(L_W1), the reference current vref1 = V(12)-V(0), and the phase power system’s voltage Vout1 = V(19)-V(123).
Solution to Application Example 1.5
The solution is presented in Fig. E1.5.3.

1.5 Effects of poor power quality on power system devices
Poor electric power quality has many harmful effects on power system devices and end users. What makes this phenomenon so insidious is that its effects are often not known until failure occurs. Therefore, insight into how disturbances are generated and interact within a power system and how they affect components is important for preventing failures. Even if failures do not occur, poor power quality and harmonics increase losses and decrease the lifetime of power system components and end-use devices. Some of the main detrimental effects of poor power quality include the following:
• Harmonics add to the rms and peak value of the waveform. This means equipment could receive a damagingly high peak voltage and may be susceptible to failure. High voltage may also force power system components to operate in the saturation regions of their characteristics, producing additional harmonics and disturbances. The waveform distortion and its effects are very dependent on the harmonic-phase angles. The rms value can be the same but depending on the harmonic-phase angles, the peak value of a certain dependent quantity can be large [52].
• There are adverse effects from heating, noise, and reduced life on capacitors, surge suppressors, rotating machines, cables and transformers, fuses, and customers’ equipment (ranging from small clocks to large industrial loads).
• Utility companies are particularly concerned that distribution transformers may need to be derated to avoid premature failure due to overheating (caused by harmonics).
• Additional losses of transmission lines, cables, generators, AC motors, and transformers may occur due to harmonics (e.g., inter- and subharmonics) [53].
• Failure of power system components and customer loads may occur due to unpredicted disturbances such as voltage and/or current magnifications due to parallel resonance and ferroresonance.
• Malfunction of controllers and protective devices such as fuses and relays is possible [35].
• Interharmonics may occur which can perturb ripple control signals and can cause flicker at subharmonic levels.
• Harmonic instability [9] may be caused by large and unpredicted harmonic sources such as arc furnaces.
• Harmonic, subharmonic, and interharmonic torques may arise [32].
The effects of poor power quality on power systems and their components as well on end-use devices will be discussed in detail in subsequent chapters.
1.6 Standards and guidelines referring to power quality
Many documents for control of power quality have been generated by different organizations and institutes. These documents come in three levels of applicability and validity: guidelines, recommendations, and standards [5]:
• Power quality guidelines are illustrations and exemplary procedures that contain typical parameters and representative solutions to commonly encountered power quality problems;
• Power quality recommended practices recognize that there are many solutions to power quality problems and recommend certain solutions over others. Any operating limits that are indicated by recommendations are not required but should be targets for designs; and
• Power quality standards are formal agreements between industry, users, and the government as to the proper procedure to generate, test, measure, manufacture, and consume electric power. In all jurisdictions, violation of standards could be used as evidence in courts of law for litigation purposes.
Usually the first passage of a power quality document is done in the form of the guidelines that are often based on an early document from an industry or government group. Guides are prepared and edited by different working groups. A recommended practice is usually an upgrade of guidelines, and a standard is usually an upgrade of a recommended practice.
The main reasons for setting guidelines, recommendations, and standards in power systems with nonsinusoidal voltages or currents are to keep disturbances to user equipment within permissible limits, to provide uniform terminology and test procedures for power quality problems, and to provide a common basis on which a wide range of engineering is referenced.
There are many standards and related documents that deal with power quality issues. A frequently updated list of available documents on power quality issues will simplify the search for appropriate information. Table 1.5 includes some of the commonly used guides, recommendations, and standards on electric power quality issues. The mostly adopted documents are these:
Table 1.5
Some Guides, Recommendations, and Standards on Electric Power Quality
| Source | Coverage |
| IEEE and ANSI Documents | |
| IEEE 4: 1995 | Standard techniques for high-voltage testing. |
| IEEE 100: 1992 | Standard dictionary of electrical and electronic terms. |
| IEEE 120: 1989 | Master test guide for electrical measurements in power circuits. |
| IEEE 141: 1993 | Recommended practice for electric power distribution for industrial plants. Effect of voltage disturbances on equipment within an industrial area. |
| IEEE 142: 1993 (The Green Book) | Recommended practice for grounding of industrial and commercial power systems. |
| IEEE 213: 1993 | Standard procedure for measuring conducted emissions in the range of 300 kHz to 25 MHz from television and FM broadcast receivers to power lines. |
| IEEE 241: 1990(The Gray Book) | Recommended practice for electric power systems in commercial buildings. |
| IEEE 281: 1994 | Standard service conditions for power system communication equipment. |
| IEEE 299: 1991 | Standard methods of measuring the effectiveness of electromagnetic shielding enclosures. |
| IEEE 367: 1996 | Recommended practice for determining the electric power station ground potential rise and induced voltage from a power fault. |
| IEEE 376: 1993 | Standard for the measurement of impulse strength and impulse bandwidth. |
| IEEE 430: 1991 | Standard procedures for the measurement of radio noise from overhead power lines and substations. |
| IEEE 446: 1987(The Orange Book) | Recommended practice for emergency and standby systems for industrial and commercial applications (e.g., power acceptability curve [5, Fig. 2-26], CBEMA curve). |
| IEEE 449: 1990 | Standard for ferroresonance voltage regulators. |
| IEEE 465 | Test specifications for surge protective devices. |
| IEEE 472 | Event recorders. |
| IEEE 473: 1991 | Recommended practice for an electromagnetic site survey (10 kHz to 10 GHz). |
| IEEE 493: 1997 (The Gold Book) | Recommended practice for the design of reliable industrial and commercial power systems. |
| IEEE 519: 1993 | Recommended practice for harmonic control and reactive compensation of static power converters. |
| IEEE 539: 1990 | Standard definitions of terms relating to corona and field effects of overhead power lines. |
| IEEE 859: 1987 | Standard terms for reporting and analyzing outage occurrences and outage states of electrical transmission facilities. |
| IEEE 944: 1986 | Application and testing of uninterruptible power supplies for power generating stations. |
| IEEE 998: 1996 | Guides for direct lightning strike shielding of substations. |
| IEEE 1048: 1990 | Guides for protective grounding of power lines. |
| IEEE 1057: 1994 | Standards for digitizing waveform recorders. |
| IEEE P1100: 1992 (The Emerald Book) | Recommended practice for powering and grounding sensitive electronic equipment in commercial and industrial power systems. |
| IEEE 1159: 1995 | Recommended practice on monitoring electric power quality. Categories of power system electromagnetic phenomena. |
| IEEE 1250: 1995 | Guides for service to equipment sensitive to momentary voltage disturbances. |
| IEEE 1346: 1998 | Recommended practice for evaluating electric power system compatibility with electronics process equipment. |
| IEEE P-1453 | Flicker. |
| IEEE/ANSI 18: 1980 | Standards for shunt power capacitors. |
| IEEE/ANSI C37 | Guides for surge withstand capability (SWC) tests. |
| IEEE/ANSI C50: 1982 | Harmonics and noise from synchronous machines. |
| IEEE/ANSI C57.110: 1986 | Recommended practice for establishing transformer capability when supplying nonsinusoidal load currents. |
| IEEE/ANSI C57.117: 1986 | Guides for reporting failure data for power transformers and shunt reactors on electric utility power systems. |
| IEEE/ANSI C62.45: 1992 (IEEE 587) | Recommended practice on surge voltage in low-voltage AC power circuits, including guides for lightning arresters applications. |
| IEEE/ANSI C62.48: 1995 | Guides on interactions between power system disturbances and surge protective devices. |
| ANSI C84.1: 1982 | American national standard for electric power systems and equipment voltage ratings (60 Hz). |
| ANSI 70 | National electric code. |
| ANSI 368 | Telephone influence factor. |
| ANSI 377 | Spurious radio frequency emission from mobile communication equipment. |
| International Electrotechnical Commission (IEC) Documents | |
| IEC 38: 1983 | Standard voltages. |
| IEC 816: 1984 | Guides on methods of measurement of short-duration transients on low-voltage power and signal lines. Equipment susceptible to transients. |
| IEC 868: 1986 | Flicker meter. Functional and design specifications. |
| IEC 868-0: 1991 | Flicker meter. Evaluation of flicker severity. Evaluates the severity of voltage fluctuation on the light flicker. |
| IEC 1000-3-2:1994 | Electromagnetic compatibility Part 3: Limits Section 2: Limits for harmonic current emissions (equipment absorbed current ≤ 16 A per phase). |
| IEC 1000-3-6: 1996 | Electromagnetic compatibility Part 3: Limits Section 6: Emission limits evaluation for perturbing loads connected to MV and HV networks. |
| IEC 1000-4: 1991 | Electromagnetic compatibility Part 4: Sampling and metering techniques. |
| EN 50160: 1994 | Voltage characteristics of electricity supplied by public distribution systems. |
| IEC/EN 60868-0 | Flicker meter implementation. |
| IEC 61000 standards on EMC | Electromagnetic compatibility (EMC). |
| British Standards (BS) and European Norm Documents | |
| BS5406 (based on IEC 555 part 2) | Control harmonic emissions from small domestic equipment. |
| Other Documents | |
| ER G5/3 | Basis of standards in some other (mostly commonwealth) countries, but it does not include notching and burst harmonics. |
| G5/4: 2001 | Limiting harmonic voltage distortion levels on public networks at the time of connection of new nonlinear loads to ensure compatibility of all connected equipment. |
| UIE-DWG-2-92-D | Produced by the Distribution Working Group (DWG) of Union Internationale Electrothermie (UIE). Includes guides for measurements of voltage dips and short-circuit interruptions occurring in industrial installations. |
| UIE-DWG-3-92-G | UIE guides for quality of electrical supply for industrial installations, including types of disturbances and relevant standards. |
| CBEMA Curves: 1983 | Produced by the Computer Business Equipment Manufacturers Association for the design of the power supply for computers and electronic equipment. |
| ITIC Curves (new CBEMA curves) | Information Technology Industry Council (the new name for CBEMA) application. |


• The North American Standards adopted by many countries of North and South America:
a) Institute of Electrical and Electronic Engineering (IEEE).
b) American National Standards Institute (ANSI).
c) Military Specifications (MIL-Specs) published by the U.S. Department of Defense and Canadian Electric Association (CEA).
• British Standards (BS).
• European (Standards) Norms (EN).
• International Electrotechnical Commission (IEC).
• Computer Business Equipment Manufacturers Association (CBEMA) curves.
• Information Technology Industry Council (ITIC) curves [6 (Fig. 2.13), 9 (Fig. 5.9)].
• VDE (Verein Deutscher Elektrotechniker) [8, page 1] of the German association of individuals and groups concerned with electrotechnics.
• NEMA [9, page 20] of the U.S. National Electric Manufacturers Association.
1.6.1 IEC 61000 Series of Standards for Power Quality
The IEC 61000 (or EN 61000) series [54], one of the most commonly used references for power quality in Europe, contains six parts, each with standards and technical reports [9]:
• Part 1 (General). Two sections cover application and interpretation aspects of EMC (electromagnetic compatibility).
• Part 2 (Environment). Twelve sections give classification of the electromagnetic environment and compatibility levels for different environments. Some aspects of this document include harmonic compatibility levels of residential LV (low voltage) systems (IEC 61000-2-2), industrial plants (IEC 61000-24), and residential MV (medium voltage) systems (IEC 61000-2-12).
• Part 3 (Limits). Eleven sections cover emission limits for harmonics and other disturbances. Some aspects of this document include harmonic current emission limits for equipment connected at LV with low (less than 16 A per phase) current (IEC 61000-3-2), flicker (IEC 61000-3-3), harmonic current emission limits for equipment connected at LV with high (more than 16 A per phase) current (IEC 61000-3-4), and assessment of emission limits for distorting loads in MV and HV (high voltage) power systems (IEC 61000-3-6).
• Part 4 (Testing and Measurement Techniques). Thirty-one sections describe standard methods for testing equipment of emission and immunity to different disturbances. Some aspects of this document include harmonic and interharmonic measurements and instrumentation (IEC 61000-4-7), dips and interruptions (EN 61000-4-11), interharmonics (EN 61000-4-13), and power quality measurement methods (IEC 61000-4-30).
• Part 5 (Installation and Mitigation Guidelines). Seven sections cover earthing (grounding), cabling, mitigation, and degrees of protection against EM (electromagnetic) disturbances.
• Part 6 (Generic Standards). Five sections cover immunity and emission standards for residential, commercial, industrial, and power station environments.
EN 61000-3-2 [2] introduces power quality limits (Table 1.6) for four classes of equipment:
Table 1.6
Harmonic Limits Defined by the EN 61000 Standards for Different Classes of Equipment
| Harmonic order (h) | Class A (A) | Class B (A) | Class C (% of fundamental) | Class D (% of fundamental) |
| 2 | 1.08 | 1.62 | 2 | |
| 3 | 2.30 | 3.45 | 30 × λ* | 3.4 |
| 4 | 0.43 | 0.65 | ||
| 5 | 1.44 | 2.16 | 10 | 1.9 |
| 6 | 0.30 | 0.45 | ||
| 7 | 0.77 | 1.12 | 7 | 1 |
| 8 | 0.23 | 0.35 | ||
| 9 | 0.40 | 0.60 | 5 | 0.5 |
| 10 | 0.18 | 0.28 | ||
| 11 | 0.33 | 0.50 | 3 | 0.35 |
| 12 | 0.15 | 0.23 | ||
| 13 | 0.21 | 0.32 | 3 | 0.296 |
| 14–40 (even) | 1.84/h | 2.76/h | ||
| 15–39 (odd) | 2.25/h | 3.338/h | 3 | 3.85/h |

* λ is the circuit power factor.
• Class A: Balanced three-phase equipment and all other equipment, except those listed in other classes.
• Class B: Portable tools.
• Class C: Lighting equipment, including dimming devices.
• Class D: Equipment with a “special wave shape” and an input power of 75 to 600 W.
1.6.2 IEEE-519 Standard
The United States (ANSI and IEEE) do not have such a comprehensive and complete set of power quality standards as the IEC. However, their standards are more practical and provide theoretical background on the phenomena. This has made them very useful reference documents, even outside of the United States. IEEE-Std 519 [1] is the IEEE recommended practices and requirements for harmonic control in electric power systems. It is one of the well-known documents for power quality limits. IEEE-519 is more comprehensive than IEC 61000-3-2 [2], but it is not a product standard. The first official version of this document was published in 1981. Product testing standards for the United States are now considered within TC77A/WG1 (TF5b) but are also discussed in IEEE. The current direction of the TC-77 working group is toward a global IEC standard for both 50/60 Hz and 115/230 V.
IEEE-519 contains thirteen sections, each with standards and technical reports [11]:
• Section 1 (Introduction and Scope). Includes application of the standards.
• Section 2 (Definition and Letter Symbols).
• Section 3 (References). Includes standard references.
• Section 4 (Converter Theory and Harmonic Generation). Includes documents for converters, arc furnaces, static VAr compensators, inverters for dispersed generation, electronic control, transformers, and generators.
• Section 5 (System Response Characteristics). Includes resonance conditions, effect of system loading, and typical characteristics of industrial, distribution, and transmission systems.
• Section 6 (Effect of Harmonics). Detrimental effects of harmonics on motors, generators, transformers, capacitors, electronic equipments, meters, relaying, communication systems, and converters.
• Section 7 (Reactive Power Compensation and Harmonic Control). Discusses converter power factor, reactive power compensation, and control of harmonics.
• Section 8 (Calculation Methods). Includes calculations of harmonic currents, telephone interference, line notching, distortion factor, and power factor.
• Section 9 (Measurements). For line notching, harmonic voltage and current, telephone interface, flicker, power factor improvement, instrumentation, and statistical characteristics of harmonics.
• Section 10 (Recommended Practices for Individual Consumers). Addresses standard impedance, customer voltage distortion limits, customer application of capacitors and filters, effect of multiple sources at a single customer, and line notching calculations.
• Section 11 (Recommended Harmonic Limits on the System). Recommends voltage distortion limits on various voltage levels, TIF limits versus voltage level, and IT products.
• Section 12 (Recommended Methodology for Evaluation of New Harmonic Sources).
• Section 13 (Bibliography). Includes books and general discussions.
IEEE-519 sets limits on the voltage and current harmonics distortion at the point of common coupling (PCC, usually the secondary of the supply transformer). The total harmonic distortion at the PCC is dependent on the percentage of harmonic distortion from each nonlinear device with respect to the total capacity of the transformer and the relative load of the system. There are two criteria that are used in IEEE-519 to evaluate harmonics distortion:
• limitation of the harmonic current that a user can transmit/inject into utility system (THDi), and
• limitation of the voltage distortion that the utility must furnish the user (THDv).
The interrelationship of these two criteria shows that the harmonic problem is a system problem and not tied just to the individual load that generates the harmonic current.
Tables 1.7 and 1.8 list the harmonic current and voltage limits based on the size of the user with respect to the size of the power system to which the user is connected [1,64].
Table 1.7
IEEE-519 Harmonic Current Limits [1,64] for Nonlinear Loads at the Point of Common Coupling (PCC) with Other Loads at Voltages of 2.4 to 69 kV
| Maximum harmonic current distortion at PCC (% of fundamental) | ||||||
| ISC/IL | Harmonic order (odd harmonics)a | THDi | ||||
| h < 11 | 11 ≤ h < 17 | 17 ≤ h < 23 | 23 ≤ h < 35 | h ≥ 35 | ||
| < 20b | 4.0 | 2.0 | 1.5 | 0.6 | 0.3 | 5.0 |
| 20–50 | 7.0 | 3.5 | 2.5 | 1.0 | 0.5 | 8.0 |
| 50–100 | 10.0 | 4.5 | 4.0 | 1.5 | 0.7 | 12.0 |
| 100–1000 | 12.0 | 5.5 | 5.0 | 2.0 | 1.0 | 15.0 |
| > 1000 | 15.0 | 7.0 | 6.0 | 2.5 | 1.4 | 20.0 |

Here Isc = maximum short circuit current at PCC,
IL = maximum load current (fundamental frequency) at PCC.
For PCCs from 69 to 138 kV, the limits are 50% of the limits above. A case-by-case evaluation is required for PCCs of 138 kV and above.
a Even harmonics are limited to 25% of the odd harmonic limits above.
b All power generation equipment is limited to these values of current distortion, regardless of the actual Isc/IL.
Table 1.8
IEEE-519 Harmonic Voltage Limits [1,64] for Power Producers (Public Utilities or Cogenerators)
| Harmonic voltage distortion (% at PCC) | |||
| 2.3 to 69 kV | 69 to 138 kV | > 138 kV | |
| Maximum for individual harmonics | 3.0 | 1.5 | 1.0 |
| Total harmonic distortion (THDv) | 5.0 | 2.5 | 1.5 |

The short-circuit current ratio (RSC) is defined as the ratio of the short-circuit current (available at the point of common coupling) to the nominal fundamental load current (Fig. 1.23):


Thus the size of the permissible nonlinear user load increases with the size of the system; that is, the stronger the system, the larger the percentage of harmonic current the user is allowed to inject into the utility system.
Table 1.8 lists the amount of voltage distortion [1,64] specified by IEEE-519 that is acceptable for a user as provided by a utility. To meet the power quality values of Tables 1.7 and 1.8, cooperation among all users and the utility is needed to ensure that no one user deteriorates the power quality beyond these limits. The values in Table 1.8 are low enough to ensure that equipment will operate correctly.
1.7 Harmonic modeling philosophies
For the simulation and modeling of power systems, the dynamic operation is normally subdivided into well-defined quasi steady-state regions [5]. Differential equations representing system dynamics in each region are transformed into algebraic relations, and the circuit is solved at the fundamental frequency (50 or 60 Hz) in terms of voltage and current phasors.
Modern power systems have many nonlinear components and loads that produce voltage and current harmonics. By definition, harmonics result from periodic steady-state conditions, and therefore their simulation should also be formulated in terms of harmonic phasors. Considering the complicated nature of many nonlinear loads (sources) and their couplings with the harmonic power flow, sophisticated modeling techniques are required for accurate simulation. Three techniques are usually used for harmonic analysis of power systems in the presence of nonlinear loads and/or components: time-domain simulation, frequency (harmonic)-domain modeling, and iterative procedures. The more recent approaches may use time-domain, frequency-domain or some combination of time- and frequency-domain techniques to achieve a more accurate solution (e.g., the main structure of many harmonic power flow algorithms are based on a frequency-domain technique, while nonlinear loads are modeled in a time-domain simulation).
1.7.1 Time-Domain Simulation
Dynamic characteristics of power systems are represented in terms of nonlinear sets of differential equations that are normally solved by numerical integration [5]. There are two commonly used time-domain techniques:
• state-variable approach, which is extensively used for the simulation of electronic circuits (SPICE [55]), and
• nodal analysis, which is commonly used for electromagnetic transient simulation of power system (EMTP [56]).
Two main limitations attached to the time-domain methods for harmonic studies are:
• They usually require considerable computing time (even for small systems) for the calculation of harmonic information. This involves solving for the steady-state condition and then applying a fast Fourier transform (FFT); and
• There are some difficulties in time-domain modeling of power system components with distributed or frequency-dependent parameters.
The Electromagnetic Transient Program (EMTP) and PSpice are two of the well-known time-domain programs that are widely used for transient and harmonic analyses. Most examples of this book are solved using the PSpice software package.
1.7.2 Harmonic-Domain Simulation
The most commonly used model in the frequency domain assumes a balanced three-phase system (at fundamental and harmonic frequencies) and uses single-phase analysis, a single harmonic source, and a direct solution [5]. The injected harmonic currents by nonlinear power sources are modeled as constant-current sources to make a direct solution possible. In the absence of any other nonlinear loads, the effect of a given harmonic source is often assessed with the help of equivalent harmonic impedances. The single-source concept is still used for harmonic filter design. Power systems are usually asymmetric. This justifies the need for multiphase harmonic models and power flow that considerably complicates the simulation procedures.
For more realistic cases, if more than one harmonic source is present in the power system, the single-source concept can still be used, provided that the interaction between them can be ignored. In these cases, the principle of superposition is relied on to compute the total harmonic distortion throughout the network.
1.7.3 Iterative Simulation Techniques
In many modern networks, due to the increased power ratings of nonlinear elements (e.g., HVDC systems, FACTS devices, renewable energy sources, and industrial and residential nonlinear loads) as compared to the system short-circuit power, application of superposition (as applied by harmonic-domain techniques) is not justified and will provide inaccurate results. In addition, due to the propagation of harmonic voltages and currents, the injected harmonics of each nonlinear load is a function of those of other sources. For such systems, accurate results can be obtained by iteratively solving nonlinear equations describing system steady-state conditions. At each iteration, the harmonic-domain simulation techniques can be applied, with all nonlinear interactions included. Two important aspects of the iterative harmonic-domain simulation techniques are:
• Derivation of system nonlinear equations [5]. The system is partitioned into linear regions and nonlinear devices (described by isolated equations). The system solution then consists predominantly of the solution for given boundary conditions as applied to each nonlinear device. Many techniques have been proposed for device modeling including time-domain simulation, steady-state analysis, analytical time-domain expressions [references 11,13 of [5]], waveform sampling and FFT [reference 14 of [5]], and harmonic phasor analytical expressions [reference 15 of [5]].
• Solution of nonlinear equations [5]. Early methods used the fixed point iteration procedure of Gauss-Seidel that frequently diverges. Some techniques replace the nonlinear devices at each iteration by a linear Norton equivalent (which might be updated at the next iteration). More recent methods make use of Newton-type solutions and completely decouple device modeling and system solution. They use a variety of numerical analysis improvement techniques to accelerate the solution procedure.
Detailed analyses of iterative simulation techniques for harmonic power (load) flow are presented in Chapter 7.
1.7.4 Modeling Harmonic Sources
As mentioned above, an iterative harmonic power flow algorithm is used for the simulation of the power system with nonlinear elements. At each iteration, harmonic sources need to be accurately included and their model must be updated at the next iteration.
For most harmonic power flow studies it is suitable to treat harmonic sources as (variable) harmonic currents. At each iteration of the power flow algorithm, the magnitudes and phase angles of these harmonic currents need to be updated. This is performed based on the harmonic couplings of the nonlinear load. Different techniques have been proposed to compute and update the values of injected harmonic currents, including:
• Thevenin or Norton harmonic equivalent circuits,
• simple decoupled harmonic models for the estimation of nonlinear loads (e.g., Ih = 1/h, where h is the harmonic order),
• approximate modeling of nonlinear loads (e.g., using decoupled constant voltage or current harmonic sources) based on measured voltage and current characteristics or published data, and
• iterative nonlinear (time- and/or frequency-based) models for detailed and accurate simulation of harmonic-producing loads.