
CHAPTER 20
CONSTRAINT EQUATIONS
20.1 INTRODUCTION
When doing an adjustment, it is sometimes necessary to fix an observation to a specific value. For instance, in Chapter 14, it was shown that the coordinates of a control station can be fixed by setting its dx and dy corrections to zero, and thus the corrections and their corresponding coefficients in the J matrix were removed from the solution. This is called a constrained adjustment. Another constrained adjustment occurs when the direction or length of a line is held to a specific value or when an elevation difference between two stations is fixed in differential leveling. In this chapter methods available for developing observational constraints are discussed. However, before discussing constraints, the procedure for including control station coordinates in an adjustment is described.
20.2 ADJUSTMENT OF CONTROL STATION COORDINATES
![]() In examples in preceding chapters when the coordinates of a control station were excluded from the adjustments, hence their values held fixed, constrained adjustments were being performed. That is, the observations were being forced to fit the control coordinates. However, control is not perfect, and not all control is of equal reliability. This fact is evidenced by the fact that different orders of accuracy are used to classify control.
In examples in preceding chapters when the coordinates of a control station were excluded from the adjustments, hence their values held fixed, constrained adjustments were being performed. That is, the observations were being forced to fit the control coordinates. However, control is not perfect, and not all control is of equal reliability. This fact is evidenced by the fact that different orders of accuracy are used to classify control.
When more than minimal control is held fixed in an adjustment, the observations are forced to fit this control. For example, if the coordinates of two control stations are held fixed, but their actual positions are not in agreement with the values given by their held coordinates, the observations will be adjusted to match the erroneous coordinates. Simply stated, precise observations may be forced to fit less precise control. This was not a major problem in the days of transits and tapes, but does happen with modern instrumentation. This topic is discussed in more detail in Chapter 21.
To clarify the problem further, suppose that a new survey is tied to two existing control stations set from two previous surveys. Assume that the precision of the existing control stations is only 1:10,000. A new survey uses equipment and field procedures designed to produce a survey of 1:50,000. Thus, it will have a higher accuracy than either of the control stations to which it must fit. If both existing control stations are fixed in the adjustment, the new observations must distort to fit the errors of the existing control stations. After the adjustment, their residuals will show a lower-order fit that matches the control. In this case, it would be better to allow the control coordinates to adjust according to their assigned quality so that the observations are not distorted. However, it should be stated that the precision of the new coordinates relative to stations not in the adjustment can only be as good as the initial control.
The observation equations for control station coordinates are

In Equation (20.1), x′ and y′ are the observed coordinate values of the control station, x and y the published coordinate values for the station, and vx and vy the residuals for the respective published coordinate values.
To allow the control to adjust, Equations (20.1) must be included in the adjustment for each control station. To fix a control station in this scheme, high weights are assigned to the station's coordinates. Conversely, low weights will allow a control station's coordinates to adjust. In this manner, all control stations are allowed to adjust in accordance with their expected levels of accuracy. In Chapter 21, it will be shown that when the control is included as observations, poor observations and control stations can be isolated in the adjustment by using weights.
20.3 HOLDING CONTROL STATION COORDINATES AND DIRECTIONS OF LINES FIXED IN A TRILATERATION ADJUSTMENT
![]() As demonstrated in Example 14.1, the coordinates of a control station are easily fixed during an adjustment. This is accomplished by assigning values of zero to the coefficients of the dx and dy correction terms. This method removes their corrections from the equations. In that particular example, each observation equation had only two unknowns, since one end of each observed distance was a control station that was held fixed during the adjustment. This was a special case of a method known as solution by elimination of constraints.
As demonstrated in Example 14.1, the coordinates of a control station are easily fixed during an adjustment. This is accomplished by assigning values of zero to the coefficients of the dx and dy correction terms. This method removes their corrections from the equations. In that particular example, each observation equation had only two unknowns, since one end of each observed distance was a control station that was held fixed during the adjustment. This was a special case of a method known as solution by elimination of constraints.
This method can be shown in matrix notation as
In Equation (20.6), A1, A2, X1, X2, L1, and L2 are the A, X, and L matrices partitioned by the constraint equations, as shown in Figure 20.2; C1 and C2 are the partitions of the matrix C consisting of the coefficients of the constraint equations; and V is the residual matrix. In this method, matrices A, C, and X are partitioned into two matrix equations that separate the constrained and unconstrained observations. Careful consideration should be given to the partition of C1 since this matrix cannot be singular. If singularity exists, a new set of constraint equations that are mathematically independent must be determined. Also, since each constraint equation will remove one parameter from the adjustment, the number of constraints must not be so large that the remaining A1 and X1 have no independent equations or are themselves singular.

FIGURE 20.2 A, X, and L matrices partitioned.
From Equation (20.6), solve for X1 in terms of C1, C2, X2, and L2 as
Substituting Equation (20.7) into Equation (20.5) yields
Rearranging Equation (20.8), regrouping, and dropping V for the time being gives
Letting A′ = −A1C1−1C2 + A2, Equation (20.9) can be rewritten as
Now Equation (20.10) can be solved for X2, which, in turn, is substituted into Equation (20.7) to solve for X1.
It can be seen that in the solution by elimination of constraint, the constraints equations are used to eliminate unknown parameters from the adjustment, thereby fixing certain geometric conditions during the adjustment. This method was used when the coordinates of the control stations were removed from the adjustments in previous chapters. In the following subsection, this method is used to hold the azimuth of a line during an adjustment.
20.3.1 Holding the Direction of a Line Fixed by Elimination of Constraints
Using this method constraint equations are written, and then substituted functionally into the observation equations to eliminate unknown parameters. To illustrate this, suppose that the direction of line IJ shown in Figure 20.3 is fixed. Thus, the position of J is constrained to move linearly along IJ during the adjustment. If J moves to J′ after adjustment then the relationship between the direction of IJ and dxj and dyj is

FIGURE 20.3 Holding direction IJ fixed.
For example, suppose that the direction of line AB in Figure 20.4 is to be held fixed during a trilateration adjustment. Noting that station A is to be held fixed and using prototype Equation (14.9), the following linearized observation equation results for observed distance AB.
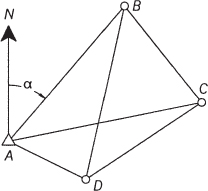
FIGURE 20.4 Holding direction AB fixed in a trilateration adjustment.

Now, based on Equation (20.11), the following relationship is written for line AB:
Substituting Equation (20.13) into Equation (20.12) yields

Factoring dyb in Equation (20.14), the constrained observation equation is

Using this same method, the coefficients of dyb for lines BC and BD are also determined resulting in the J matrix shown in Table 20.1.
TABLE 20.1 The J Matrix of Figure 20.3
| Unknowns | |||||
| Distance | dyb | dxc | dyc | dxd | dyd |
| AB | [(xb − xa)tan α + (yb − ya)]/AB | 0 | 0 | 0 | 0 |
| AC | 0 | (xc − xa)/AC | (yc − ya)/AC | 0 | 0 |
| AD | 0 | 0 | 0 | (xd − xa)/AD | (yd − ya)/AD |
| BC | [(xb − xc)tan α + (yb − yc)]/BC | (xc − xb)/BC | (yc − yb)/BC | 0 | 0 |
| BD | [(xb − xd)tan α + (yb − yd)]/BD | 0 | 0 | (xd − xb)/BD | (yd − yb)/BD |
| CD | 0 | (xc − xd)/CD | (yc − yd)/CD | (xd − xc)/CD | (yd − yc)/CD |
For this example the K, X, and V matrices are

20.4 HELMERT'S METHOD
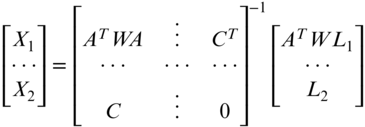
![]() Another method of introducing constraints was originally presented by Friedrich R. Helmert in 1872. In this procedure, the constraint equation(s) border the reduced normal equations as
Another method of introducing constraints was originally presented by Friedrich R. Helmert in 1872. In this procedure, the constraint equation(s) border the reduced normal equations as

To establish this matrix, the normal matrix and its matching constants matrix are formed, as has been done in Chapters 13 through 19. Following this, the observation equations for the constraints are formed. These observation equations are then included in the normal matrix as additional rows [C] and columns [CT] in Equation (20.16) and their constants are added to the constants matrix as additional rows [L2] in Equation (20.16). The inverse of this bordered normal matrix is computed. The matrix solution of the Equation (20.16) is
In Equation (20.17) X2 is not used in the subsequent solution for the unknowns. This procedure is illustrated in the following examples. Both Example 20.2 and 20.3 are solved in the spreadsheet Chapter 18.xls, which is available on the book's companion website. In this spreadsheet, the examples are first solved using Helmert's method. Following this, they are solved using the elimination of constraints method. No matter the method used, the same results are always obtained.
20.5 REDUNDANCIES IN A CONSTRAINED ADJUSTMENT
![]() The number of redundancies in an adjustment increases by one for each parameter that is removed by a constraint equation. An expression for determining the number of redundancies is
The number of redundancies in an adjustment increases by one for each parameter that is removed by a constraint equation. An expression for determining the number of redundancies is
where r is the number of redundancies in the system, m the number of observations in the system, n the number of unknown parameters in the system, and c the number of mathematically independent constraints applied to the system. In Example 20.2, there were seven observations in a differential leveling network that had four stations with unknown elevations. One constraint was added to the system of equations that fixed the elevation difference between B and E as −17.60. In this way, the elevation of B and E became mathematically dependent. By applying Equation (20.18), it can be seen that the number of redundancies in the system is r = 7 − 4 + 1 = 4. Without the aforementioned constraint, this adjustment would have only 7 − 4 = 3 redundancies. Thus, the constraint added one redundant observation to the adjustment while making the elevations of B and E mathematically dependent.
Care must be used when adding constraints to an adjustment. It would be possible to add as many mathematically independent constraint equations as there are unknown parameters. If that were done, all unknowns would be constrained or fixed, and it would be impossible to perform an adjustment. Furthermore, it is also possible to add constraints that are mathematically dependent equations. Under these circumstances, even if the system of equations has a solution, two mathematically dependent constraints would remove only one unknown parameter, and thus the redundancies in the system would increase by only one.
20.6 ENFORCING CONSTRAINTS THROUGH WEIGHTING
The methods described previously for handling constraint equations can often be avoided simply by overweighting the observations to be constrained in a weighted least squares adjustment. This was done in Example 16.2 to fix the direction of a line. As a further demonstration of the procedure of enforcing constraints by overweighting, Example 20.3 will be adjusted by writing observation equations for azimuth AB and the control station coordinates XA and YA. These observations will be fixed by assigning a 0.001″ standard deviation to the azimuth of line AB and standard deviations of 0.001 ft to the coordinates of Station A.
The J, K, and W matrices for the first iteration of this problem are listed below. Note that the numbers have been rounded to three-decimal places for display purposes only.

The results of the adjustment (from the program ADJUST) are presented below.
*****************Adjusted stations*****************Standard error ellipses computedStation X Y Sx Sy Su Sv t=================================================================================A 1,000.000 1,000.000 0.0010 0.0010 0.0010 0.0010 135.00°B 1,003.072 3,640.003 0.0010 0.0217 0.0217 0.0010 0.07°C 2,323.081 3,638.468 0.0205 0.0248 0.0263 0.0186 152.10°D 2,496.081 1,061.748 0.0204 0.0275 0.0281 0.0196 16.37°******************************Adjusted Distance Observations******************************Station StationOccupied Sighted Distance V S==========================================================A C 2,951.620 0.0157 0.0215A B 2,640.004 -0.0127 0.0217B C 1,320.010 -0.0056 0.0205C D 2,582.521 -0.0130 0.0215D A 1,497.355 -0.0050 0.0206B D 2,979.341 0.0159 0.0214*****************************Adjusted Azimuth Observations*****************************Station StationOccupied Sighted Azimuth V S′===============================================================A B 0° 04′ 00′ 0.0′ 0.0′****************************************Adjustment Statistics****************************************Iterations = 2Redundancies = 1Reference Variance = 1.499Reference So = ±1.2Passed X2 test at 95.0% significance level!X2 lower value = 0.00X2 upper value = 5.02A priori value of 1 used for reference variancein computations of statistics.Convergence!
Notice in the previous adjustment that the control station coordinates remained fixed and the residual of the azimuth of line AB is zero. Thus, the azimuth of line AB was held fixed without the inclusion of any constraint equation. It was simply constrained by overweighting the observation. Also note that the final adjusted coordinates of stations B, C, and D match the solution in Example 20.3.
PROBLEMS
Note: For problems requiring least squares adjustment, if a computer program is not distinctly specified for use in the problem, it is expected that the least squares algorithm will be solved using the program MATRIX, which is available in the book's companion website. Partial answers to problems that are marked with an asterisk are provided in Appendix H.
- *20.1 Given the following observed lengths in a trilateration survey, adjust the survey by least squares using the elimination of constraints method to hold the coordinates of A at xa = 30,000.00 ft and ya = 30,000.00 ft, and the azimuth of line AB to 2°31′56″± 3.0″ from North. Find the adjusted coordinates of B, C, and D.
Distance Observations Course Distance (ft) S (ft) Course Distance (ft) S (ft) AB 9,813.20 0.033 BC 9,629.69 0.033 AC 13,764.18 0.044 BD 15,006.82 0.047 AD 11,395.99 0.037 CD 9,943.63 0.033 Initial Coordinates Station X (ft) Y (ft) B 30,433.56 39,803.63 C 40,054.84 39,399.65 D 41,386.93 29,545.64 - 20.2 Do Problem 20.1 using Helmert's method.
- 20.3 Do Problem 20.1 using the method of weighting for the azimuth.
- 20.4 Repeat Problem 20.1 using the following data.
Control Station Approximate Coordinates Station X (m) Y (m) Station X (m) Y (m) A 6509.325 6681.064 B 6402.643 7619.260 C 7329.700 7632.254 D 7427.389 6765.248 Distance Observations Occupied Sighted Distance (m) S (m) A B 944.243 0.005 A C 1256.093 0.006 A D 921.916 0.005 B C 927.136 0.005 B D 1333.965 0.006 C D 872.490 0.005 Azimuth Observation Course Azimuth S AB 353°30′46″ 3.2″ - 20.5 Do Problem 20.4 using Helmert's method.
- 20.6 Do Problem 20.4 using the method of weighting for the azimuth.
- *20.7 Adjust the following differential leveling data using the elimination of constraints method. Hold the elevation of A to 136.485 m and the elevation difference ΔElevBD to −3.750 m.
Elevation Differences From To ΔElev (m) S (m) A B −7.466 0.030 B C 4.101 0.030 D E 5.842 0.037 E A 5.368 0.042 C D −7.932 0.021 - 20.8 Repeat Problem 20.7 using Helmert's method.
- 20.9 Repeat Problem 20.7 using the weighting method.
- 20.10 Do Problem 13.14 holding distance BC to 100.00 ft.
- *(a) Use the elimination of constraints method.
- (b) Use Helmert's method.
- (c) Compare the results of the adjustments from the different methods.
- 20.11 Do Problem 13.15 holding the elevation difference between V and Z to 30.00 ft.
- (a) Use the elimination of constraints method.
- (b) Use Helmert's method.
- (c) Use the method of overweighting technique.
- (d) Compare the results of the adjustments from the different methods.
- 20.12 Do Problem 12.15 holding the difference in elevation between Stations 2 and 8 to 5.500 m.
- (a) Use the elimination of constraints method.
- (b) Use Helmert's method.
- (c) Use the method of overweighting technique.
- *20.13 Assuming stations A and D are second-order, class I horizontal control (1:50,000), do Problem 14.9 by including the control in the adjustment.
- 20.14 Do Problem 15.8 assuming station A is first-order horizontal control (1:100,000) and D is second-order, class II horizontal control (1:20,000) using the method of weighting.
- 20.15 Do Problem 15.11 assuming the control stations A and B are first order control (1:100,000) and stations G and H are second-order, class II horizontal control (1:20,000) using the method of weighting.
- 20.16 Do Problem 16.16 assuming Stations A and D are third-order, class I control (1:10,000) using the method of weighting.
PRACTICAL PROBLEMS
- 20.17 Develop a computational program that computes the coefficients for the J matrix in a trilateration adjustment with a constrained azimuth. Use the program to solve Problem 20.9.
- 20.18 Develop a computational program that computes a constrained least squares adjustment of a trilateration network using Helmert's method. Use this program to solve Problem 20.13.