APPENDIX E
Mathematical Tables





C. Some Common Indefinite Integrals
Note: For each of the indefinite integrals, an arbitrary constant may be added to the result.
 (E.20)
(E.20)
![]() (E.21)
(E.21)
![]() (E.22)
(E.22)
![]() (E.23)
(E.23)
![]() (E.24)
(E.24)
![]() (E.25)
(E.25)
![]() (E.26)
(E.26)
![]() (E.27)
(E.27)
![]() (E.28)
(E.28)
![]() (E.29)
(E.29)
![]() (E.30)
(E.30)
 (E.31)
(E.31)
 (E.32)
(E.32)
![]() (E.33)
(E.33)
 (E.34)
(E.34)
 (E.35)
(E.35)
 (E.36)
(E.36)
 (E.37)
(E.37)
 (E.38)
(E.38)
D. Some Common Definite Integrals
![]() (E.39)
(E.39)
![]() (E.40)
(E.40)
![]() (E.41)
(E.41)
![]() (E.42)
(E.42)
 (E.43)
(E.43)
![]() (E.44)
(E.44)
![]() (E.45)
(E.45)



F. Fourier Transforms
Table E.1. Common Fourier transform pairs
| Signal (Time Domain) | Transform (Frequency Domain) |
| rect(t/t0) | t0 sinc(ft0 ) |
| tri(t/t0 ) | t0 sinc2 (ft0 ) |
 | |
 | |
| sinc(t/t0 ) | t0 rect(ft0 ) |
| sinc2(t/t0 ) | t0 tri(ft0 ) |
| exp(j2πfo t) | δ(f – fo) |
| cos(2πfo t + θ) | |
| δ(t – to) | exp(−j2πfto) |
| sgn(t) | |
| u(t) | |
| exp(−(t/t0 )2) |
G. z-Transforms
Table E.2. Common z-transform pairs
| Signal | Transform | Region of Convergence |
| δ[n] | 1 | All z |
| u[n] | |z| > 1 | |
| nu[n] |  |
|z| > 1 |
| n2 u[n] |  |
|z| > 1 |
| n3 u[n] |  |
|z| > 1 |
| bnu[n] | |z| > |b| | |
| nbnu[n] |  |
|z| > |b| |
| n2bnu[n] |  |
|z| > |b| |
| bncos[Ωon]u[n] |  |
|z| > |b| |
| bn sin[Ωon]u[n] |  |
|z| > |b| |
| |z| > 1 | ||
| |z| > |b| | ||
| exp(bz_1) | All z |
H. Laplace Transforms
Table E.3. Common Laplace transform pairs
| Function | Transform | Region of Convergence |
| u(t) | 1/s | Re[s]>0 |
| exp(−bt)u(t) | Re[s]>-b | |
| sin (bt)u(t) | Re[s] >0 | |
| cos(bt)u(t) | Re[s] >0 | |
| e− at sin(bt)u(t) | Rs[s] >-a | |
| e− at cos(bt)u(t) | Rs[s] >-a | |
| δ(t) | 1 | All s |
| s | All s | |
| tnu(t), n > 0 | Re[s] >0 | |
| tne−btu(t), n ≥ 0 | Re[s] >-b |
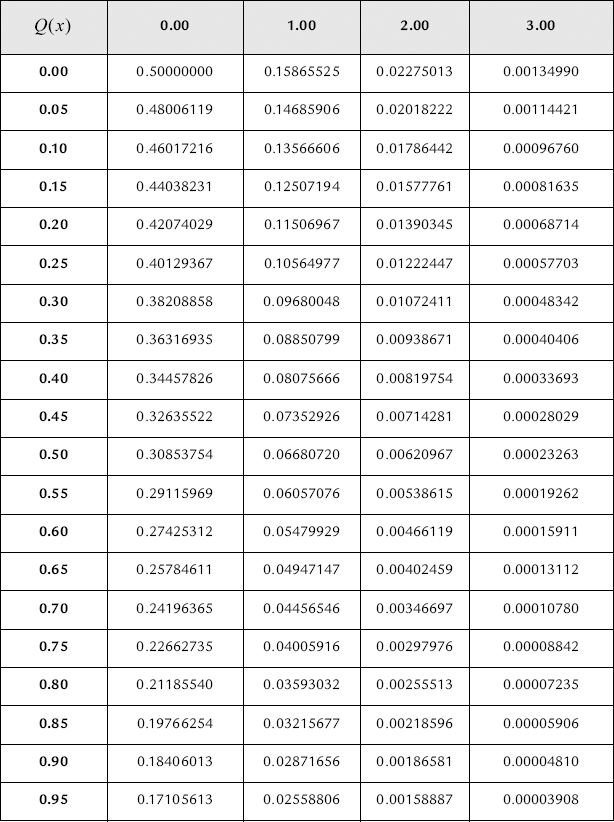
I. Table of the Q-function
The following table lists values of the function Q(x) for 0 ≤ x ≤ 4 in increments of 0.05. To find the appropriate value of x, add the value at the beginning of the row to the value at the top of the column. For example, to find Q (1.75), find the entry from the column headed by 1.00 and the row headed by 0.75 to get Q (1.75) = 0.04005916.
Table E.4. Values of Q(x) for 0 ≤ x ≤ 4 (in increaments of 0.05)