
Maybe I’ll win Saved by zero Holding onto Winds that teach me I will conquer Space around me
—The Fixx, "Saved by Zero"
Modern mathematics demands advanced visualization tools. Although
Mathematica’s 2D graphics are impressive, 3D graphics is where
Mathematica really distinguishes itself. As with 2D, 3D graphics are
represented symbolically but with the head Graphics3D instead of Graphics. There are 3D counterparts to most 2D
plotting functions. For example, Plot3D and ListPlot3D are the counterparts to the 2D
functions Plot and ListPlot. There are also many functions unique
to 3D space, such as SphericalPlot3D
and RevolutionPlot3D.
Mathematica’s 3D graphics are interactive, although it is difficult to illustrate this in book form! Any 3D plot or drawing can be rotated, flipped, and stretched, allowing you to see different perspectives. Furthermore, Mathematica 6 added a host of options for controlling lighting, camera placement, and even how light reflects off of surfaces (see 7.12 Controlling Viewing Geometry and 7.13 Controlling Lighting and Surface Properties).
I think most users are quite impressed with the breadth
and depth of what Mathematica 7 can achieve with plotting functions
(see 7.1 Plotting Functions of Two Variables in Cartesian
Coordinates
through 7.9 Plotting 3D Regions Where a Predicate Is Satisfied).
However, as a programmer, I am even more taken with what can be
achieved in Mathematica that would be next to impossible in most
plotting packages outside of Mathematica. When you ask the Mathematica
kernel to perform a plot, it does not produce a raster image that the
frontend simply renders using the graphics hardware. Instead, it
produces a symbolic representation of the plot that the frontend
translates into a raster image. Why is this relevant? Imagine you were
working in another domain (e.g., Microsoft Excel) and there were two
plotting functions that each did half of what you wanted to render on
the screen. How could you morph those two plots to achieve the desired
result? You couldn’t. (I’m ignoring whatever skills you might possess
as a Photoshop hacker!) In Mathematica, all hope is not lost. In 7.6 Combining 2D Contours with 3D Plots, a 3D plot and a 2D
contour plot are combined to achieve a 3D plot with a 2D contour
"shadow" underneath. Another example is 7.10 Displaying 3D Geometrical Shapes: RevolutionPlot3D is used to generate a cone
to compensate for the lack of a Cone primitive in Mathematica 6 (Cone is built into Mathematica 7).
Achieving these results involves sticking your head under the hood
and, sometimes, doing quite a bit of trial and error, but the results
are within reach once you have the general principles.
In 18.5 Compiling Functions to Improve Performance, I discuss how the attributes of 3D graphics can be controlled through stylesheets. If you intend to create publication-quality documents in Mathematica, you should familiarize yourself with stylesheets.
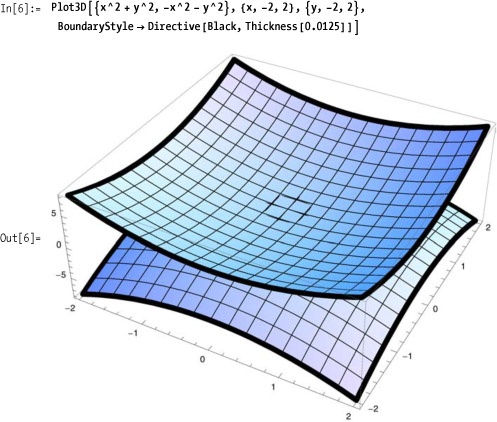
Use Plot3D with the function
or functions to plot and two lists specifying the ranges for the
independent variables.

As with most plots, you can provide multiple functions. However, 3D plots will become crowded quickly (Figure 7-1), so consider placing multiple plots side by side rather than trying to shoehorn everything into a single plot. With some functions and options, this is not an issue (Figure 7-1).

As you might suspect, Plot3D has a variety of options for
customizing presentation. Here I use Complement to list only those options that
differ from the 2D Plot function in
6.1 Plotting Functions in Cartesian Coordinates.
In[3]:= Complement[First /@ Options[Plot3D], First /@ Options[Plot]]
Out[3]= {AxesEdge, BoundaryStyle, Boxed, BoxRatios, BoxStyle, ControllerLinking,
ControllerMethod, ControllerPath, FaceGrids, FaceGridsStyle,
Lighting, NormalsFunction, RotationAction, SphericalRegion, ViewAngle,
ViewCenter, ViewMatrix, ViewPoint, ViewRange, ViewVector, ViewVertical}
AxesEdge determines where the
axes are drawn, and the default value of Automatic (Figure 7-2) usually gives good results.
You can override the default by proving a specification of the form
{{dir y, dir z},{dir
x, dir z},{dir x, dir y}} where each dir i
must be either +1 or -1, indicating whether axes are drawn on the edge
of the box with a larger or smaller value of coordinate i,
respectively (Figure 7-2).

BoundaryStyle allows you to stylize the edge of a plot surface.
Boxed, BoxRatios, and
BoxStyle control the presence,
proportions, and style of the edges surrounding 3D plots. Each of the
plots in Figure 7-3 is of the
same function. The differences are that Figure 7-3 is not boxed, Figure 7-3 is boxed with Automatic
ratios, and Figure 7-3 and Figure 7-3 have specified
ratios.

FaceGrids specifies
grid lines to draw on the faces of the bounding box. You can specify
All or specific faces using
{x,y,z}, where two values are 0 and
the third is either +1 (largest value) or -1 (smallest value).
FaceGridsStyle allows you to
stylize the grid to your liking.

ViewAngle, ViewCenter, ViewMatrix, ViewPoint, ViewRange, ViewVector, and ViewVertical are options that give you
detailed control of the orientation of the plot. These are covered in
7.12 Controlling Viewing Geometry.
6.1 Plotting Functions in Cartesian Coordinates
demonstrates Plot, which is the 2D
counterpart to Plot3D.
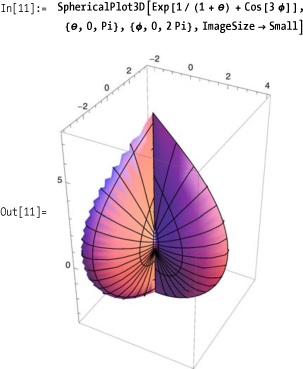
You want to plot a surface with spherical radius
r as a function of rotational
angles θ (latitude) and ϕ (longitude).
Use SphericalPlot3D when
plotting one or more surfaces in spherical coordinates. Such plots
most often arise in situations where there is some degree of
rotational symmetry. For example, a sphere is fully symmetrical under
all rotations and is trivially plotted using SphericalPlot3D as a constant radius.

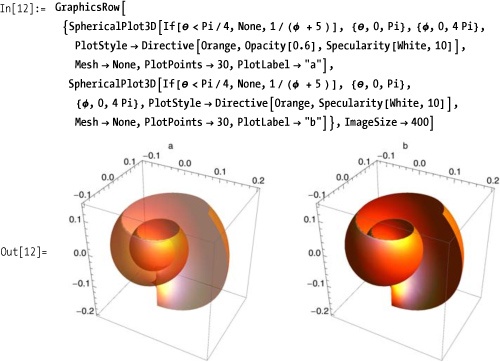
You can plot multiple surfaces by providing a list of functions
and leave holes in some of the surfaces by returning the symbol
None for these regions.

Of course, you will probably use SphericalPlot3D to plot more interesting
functions too.
Use PlotStyle to
achieve some dramatic effects. Applying the Opacity option is especially useful when
specifying rotational angles greater than 2Pi radians; otherwise, the resulting
interior surfaces would be hidden. Compare Figure 7-4 with Figure 7-4.
See 7.4 Plotting 3D Surfaces Parametrically for
the relationship between SphericalPlot3D and ParametricPlot3D.
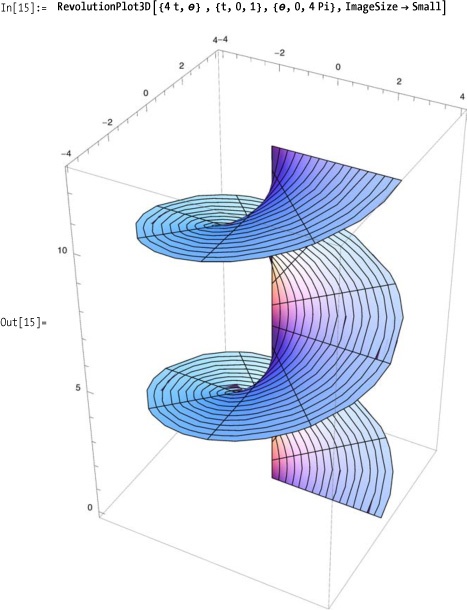
You want to visualize a surface generated via a revolution of a function or parametric curve around the z-axis.
Many common surfaces can be generated by revolving a 2D curve. The following examples illustrate the basic idea.
Revolve a parabola to create a bowl.

Revolve a vertical line at a constant distance from the center to create a cylinder.

Functions that incorporate the angle of revolution can create
more exotic surfaces, such as the spiral shown here. Notice how the
angle of revolution can be greater (or less) than 2Pi (one revolution).
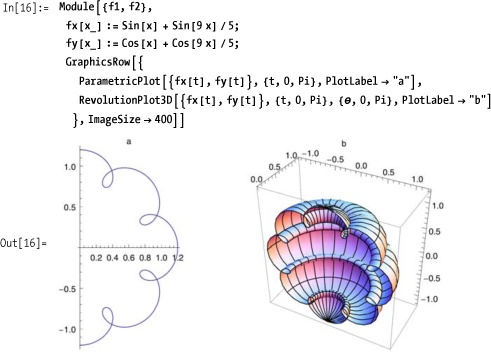
To get a feel for RevolutionPlot3D, plot the 2D parametric
version of the equation next to the 3D revolution. It is fairly easy
to see how the 180-degree rotation of the 2D curve around the y-axis
in Figure 7-5 will
yield the 3D surface shown in Figure 7-5.
RevolutionPlot3D was
introduced in Mathematica 6. Prior to version 6, similar surfaces
could be generated with ParametricPlot3D; however, the equations one
needs to plot a specific surface using RevolutionPlot3D are often simpler and more
intuitive than those used when plotting parametrically. Both of the
following plots yield a torus, but the RevolutionPlot3D version is simpler.

As of version 6, Mathematica did not have a RevolutionAxis option, which was in a legacy
package called Graphics'SurfaceOfRevolution'. The effect
could be emulated by swapping axes and using ViewVertical. Here I also use ViewPoint to compensate for the different
default orientations of the two plotting functions, but that is not
strictly necessary. The important aspect of the code that produces
Figure 7-6 is the transposition
of t and t^2 in RevolutionPlot3D.

(Note: RevolutionAxis was
added in version 7.)
See discussion of ParametricPlot3D in 7.4 Plotting 3D Surfaces Parametrically.
See 7.12 Controlling Viewing Geometry for use of
the geometry options ViewVertical
and ViewPoint.
Here you plot a curve in 3D space by specifying a single
variable u over the range [-Pi,Pi]. This creates the curve in 3D
space, shown in Figure 7-7.

Here you plot a surface in 3D space by specifying an area
defined by variables u and v, yielding Figure 7-8.

To get a better understanding of ParametricPlot3D, consider it as a
generalization of the more specialized Plot3D. In Plot3D, the x and
y coordinates always vary linearly over the range
as it plots a specified function in the z-axis. This implies that you
can mimic Plot3D using ParametricPlot (Figure 7-9). The only
caveat is that you need to change the BoxRatios, which have different defaults in
ParametricPlot3D.

The relationship between ParametricPlot3D and SphericalPlot3D can be understood in terms
of the following:
fx = f[θ,ϕ] sin θ cos ϕ
fy = f[θ,ϕ] sin θ sin ϕ
fz = f[θ,ϕ] cos θ
For example, if we pick f[ θ , ϕ ] to be the constant 1, both SphericalPlot3D and ParametricPlot3D give a sphere using this
relationship.

You want to create a plot showing the surfaces where a function of three variables takes on a specific value (Figure 7-10).
Use ContourPlot3D with a
function to produce evenly spaced contour surfaces for that
function.
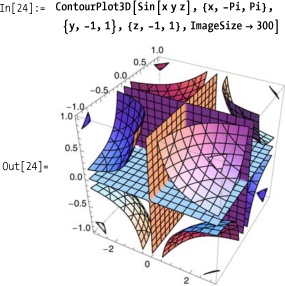
Use ContourPlot3D with an
equivalence relation to plot the surface where the equivalence is
satisfied. In Figure 7-11,
ContourPlot3D shows the surface
where the polynomial is equal to zero.

3D contour plots show surfaces of equal value. ContourPlot3D plots several equally spaced
surfaces over the specified intervals. You use the option Contours → n, where n is an integer, to control the number of
surfaces.

The 2D version ContourPlot is
discussed in 7.6 Combining 2D Contours with 3D Plots.
Transform the 2D contour plot into a 3D graphic by adding a third z coordinate of constant value. Use Show to combine the new 3D graphic with a 3D plot.


Use the RegionFunction option
with Plot3D, SphericalPlot3D,
RevolutionPlot3D, ParametricPlot3D, and other 3D
plots.

The parameters passed to a region function vary by plot type; these are listed in Table 7-1.
Table 7-1. Region functions by plot type
Plot type | RegionFunction arguments |
|---|---|
| |
| |
| |
| |
| |
The region function can be used to create quite exotic effects, as demonstrated in Figure 7-12.

You have a matrix of data points that you want to plot as heights, with possible interpolation of intermediate values.
Use ListPlot3D with InterpolationOrder→0 to plot distinct
levels, InterpolationOrder→1 to
join points with straight lines, and InterpolationOrder→2 or higher to create
smoother surfaces.
In[31]:= SeedRandom[1000]; data = RandomReal[{-10, 10}, {20, 20}];

3D list plots are often enhanced by use of a mesh. Here,
in an example adapted from the Wolfram documentation, I show a plot of
elevation of the state of Utah by latitude and longitude. The option
MeshFunctions → {#3 &} uses the elevation data to
specify the mesh giving contours (first image) that help visualize the
elvation better than the default mesh (second image).

RegionPlot takes a predicate
of up to three variables. The predicate can use all of the relational
operators (<, <=, >, >=, ==,
!=) and logical connectives (&&, ||, Not).
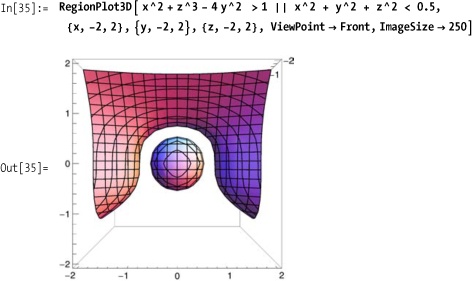
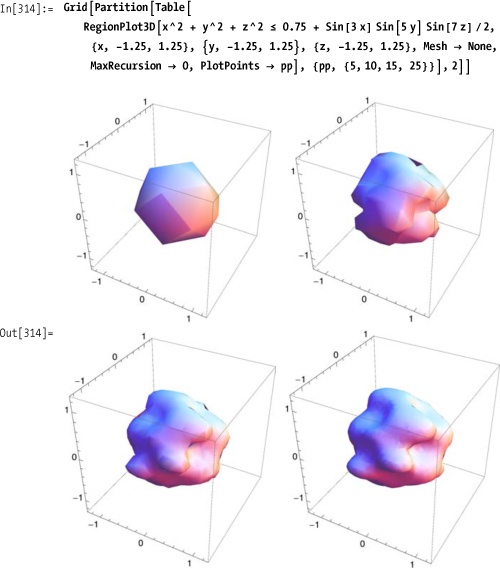
RegionPlot3D uses an adaptive
algorithm that is based on the options PlotPoints and MaxReeursion. The default setting for each
is Automatic, meaning Mathematica
will pick what it thinks are appropriate values based on the predicate
and ranges. The algorithm first samples using equally spaced points,
and then subdivides those points based on MaxReeursions and the behavior of the
predicate. It is possible for the algorithm to miss regions where the
predicate is true. One way to gain confidence in the result is to plot
with successively larger values for Plotpoints and MaxReeursion. However, of the two, PlotPoints usually has a more significant
effect.
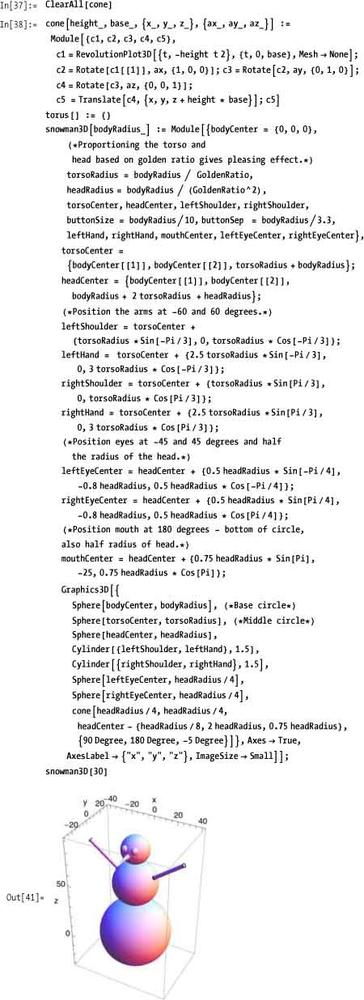
A more mathematically inspired demonstration of graphics
primitives is the Dandelin construction. Here one drops two spheres,
one small and one large, into a cone such that the spheres do not
touch. Consider a plane that slices through the cone tangent to the
surface of both spheres. As you may know, a plane intersecting a cone
traces an ellipse. What is remarkable is that the tangent points with
the spheres are the foci of this ellipse. I adapt the construction
from Stan Wagon’s Mathematica in Action (W.H.
Freeman), upgrading it to take advantage of the advanced 3D features
of Mathematica 6, such as Opacity
and PointSize. I refer the reader
to Wagon’s book for the derivation of the mathematics.

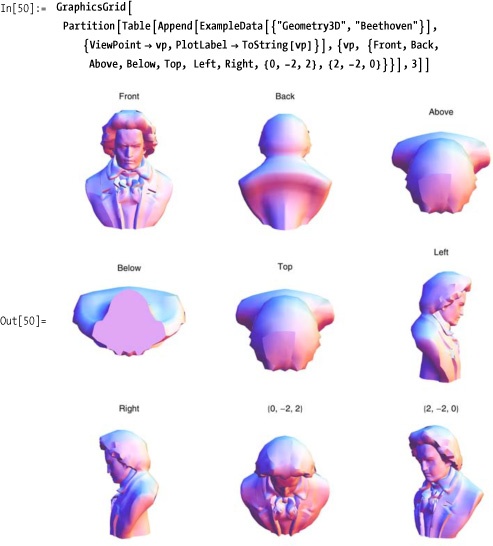
Mathematica can also deal with 3D graphics that are not
necessarily of mathematical origin. You can demonstrate this using
ExampleData.

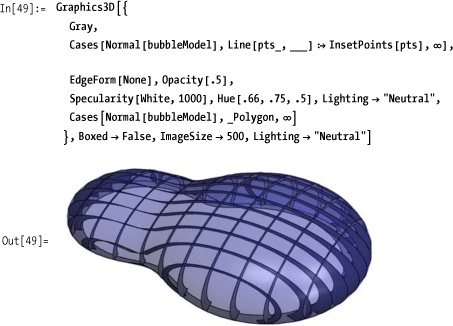
The following solution was developed by Ulises Cervantes-Pimentel and Chris Carlson of Wolfram Research. As with 7.6 Combining 2D Contours with 3D Plots, the trick is to leverage Mathematica’s symbolic representation of 3D graphics and to perform transformations on that representation to yield the desired result.
You begin with the shape of interest. Here Chris Carlson was
interested in an architectural model of a bubblelike structure. Note
the use of the Mesh option, which
is central to extracting the wireframe.

You can go directly to a wireframe by simply extracting the lines.

The solution was quite simple because the transformation
was a simple extraction of graphics data that was already present.
However, you can take this approach much further. Here Normal is used to force the Graphics3D object into a representation of
low-level primitives, and Cases is
used to extract the lines. However, this time the lines are
transformed to polygons to create a box model.

If your end goal was an architectural structure, the box model is no good. You need to open up the space. Here is an even more sophisticated transformation that turns the walls of the model into curved support beams.

As a final step, you may want to show how the structure
would look if it were covered with a translucent covering. Here
Mathematica’s sophisticated Lighting and Specularity options are used.
7.13 Controlling Lighting and Surface Properties
covers Lighting and Specularity.
Chris Carlson gave a superb presentation at the 2009 International Mathematica User Conference (IMUC). This post on the Wolfram Blog covers a good portion of the talk: http://bit.ly/291CDE.
You want to control the placement of a simulated camera that determines viewing perspective of a 3D graphic.
Use the ViewPoint
option to control the point in space from which a 3D object is to be
viewed. Here I enumerate some of the possibilities.
Use the ViewCenter
option to control the point that should appear as the center of the
displayed image. The coordinates are scaled to the range [0,1].

Use the ViewVertical
option to control which coordinates should be vertical.
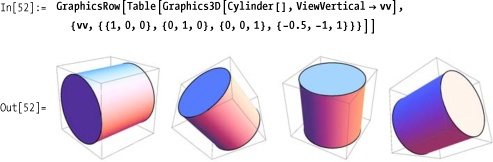
For many users, combinations of ViewPoint, ViewCenter, and ViewVertical will create the initial spatial
orientation of the 3D graphic that most suits your tastes or visual
emphasis. However, there are additional options that are useful in
some circumstances. ViewVector
allows you to control the position and orientation of a simulated
camera. ViewVector takes either a
single vector that specifies the position of the camera that is
pointed at ViewCenter or a pair of vectors that specify both the
position of the camera and the center. ViewVector overrides ViewPoint and ViewCenter. To understand the concept of the
camera, picture yourself looking through the camera as it moves around
the stationary graphic.

Continuing with the camera metaphor, the option ViewAngle is analogous to zooming. The
default view angle is 35 degrees. You can specify
a specific angle or the symbol All,
which will pick an angle that is sufficient to see everything.
You want to modulate lighting and surface characteristics to highlight important features or create artistic effects.
Mathematica provides quite sophisticated control of light via
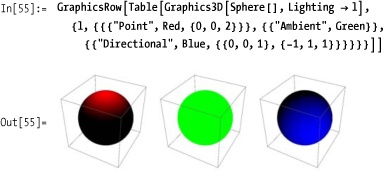
the options Lighting, Specularity, and Glow. The simplest settings for Lighting are Automatic, "Neutral", and None (Figure 7-13).

For more sophisticated control, you can specify combinations of ambient, directional, spot, and point light sources (Figure 7-14). Try the code on your own for the full effect.
Glow is the opposite of
Lighting. It specifies the color of
the surface itself. Glow is also
different from an object’s color, as you can see in Figure 7-15. (However, Glow is not easily demonstrated in
monochrome print. Please try the code on your own to see the effect.)
Both the cylinder and the sphere have a green color, but the cylinder
also has a green glow. There is no lighting, so only the cylinder
appears bright because of Glow.
Another way Glow differs from
Lighting is that it does not affect
surrounding objects, only the objects with Glow. In other words, a glowing object is
not a light source in the Graphics3D domain.

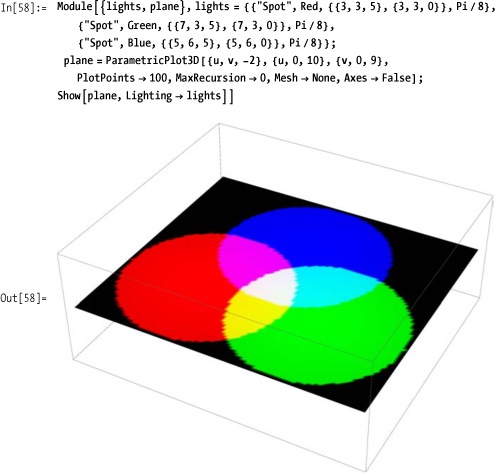
As you probably would expect from your experience with colored lights, Mathematica lighting follows the additive color model (refer to the online version of the following image to appreciate its full glory: http://bit.ly/xIgx7).
Lighting can be used as an
option that applies to an entire graphic, but it also works as a
graphics directive that applies to the objects that follow it within
the same scope.

Specularity and
Glow are strictly used as
directives, although Specularity
can be combined with Lighting.
The use cases covered in this recipe should satisfy most common
uses of colored lighting, but if you are trying to achieve very
specific lighting effects, you should consult the Mathematica
documentation to explore the full range of forms Lighting, Specularity, and Glow can take and how they interact with
color.
Use Scale to stretch or shrink graphics.

Use Translate to move
graphics in 3D space. Figure 7-16
presents four translations of a sphere that is originally constructed
at the origin.

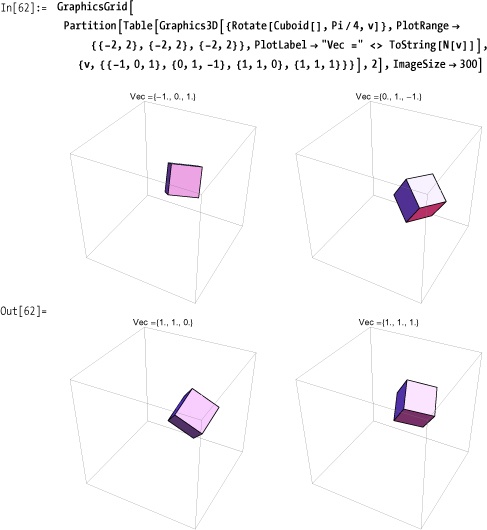
Use Rotate to change the
orientation of graphics. Figure 7-17 rotates
a cube through Pi/4 radians (45 degrees) but uses different vectors to
define the rotation axis.
In addition to the primitive transformations shown in
the solution, Mathematica provides support for transformation matrices
and symbolic transformation functions. Matrices include RotationMatrix, ScalingMatrix, ShearingMatrix, and ReflectionMatrix. The transformation
functions are RotationTransform,
TranslationTransform, ScalingTransform, ShearingTransform, ReflectionTransform, RescalingTransform, AffineTransform, and LinearFractional Transform. A smattering of
examples is given here. Transformations work in conjunction with the function
GeometricTransformation, which
takes a graphic and either a transformation or a matrix.
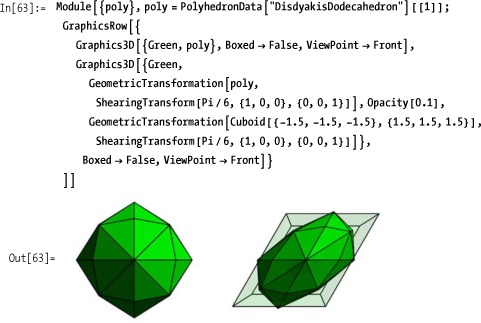
ShearingTransform[θ,v,n] is
an area or volume preserving transformation that adds a slant, also
known as a shear, to a graphic. Shear is specified in terms of an
angle θ along a vector v and normal to a second vector n. Figure 7-18 shows a polyhedron in its
original state followed by a shear transform. A translucent cube is
also transformed to give a sense of the angles.
Mathematica 6 includes PolyhedronData, which is effectively an
embedded database of polyhedra attributes. Apropos to this chapter,
PolyhedronData contains the 3D
graphics data for a variety of common and exotic polyhedra. If you
call PolyhedronData[] with no
arguments, it returns a list of all polyhedra it has information
about.

If you call PolyhedronData[poly], where poly is the name of the polyhedron, it will
return the graphic. The code given here creates a labeled grid of a
random selection of 20 polyhedra known to Mathematica 7. Here StringSplit uses a regular expression to
parse the names on CamelCase boundaries and inserts a new line so the
names fit inside the grid cells.

PolyhedraData contains a
treasure trove of polyhedra information. In the solution we
demonstrate how to extract graphics by name. Here we show the input
form of a cube.
In[66]:= PolyhedronData["Cube"] // InputForm
Out[66]//InputForm=
Graphics3D[GraphicsComplex[{{-1/2, -1/2, -1/2}, {-1/2, -1/2, 1/2}, {-1/2,
1/2, -1/2}, {-1/2, 1/2, 1/2}, {1/2, -1/2, -1/2},
{1/2, -1/2, 1/2}, {1/2, 1/2, -1/2}, {1/2, 1/2, 1/2}}, Polygon[{{8, 4, 2,
6}, {8, 6, 5, 7}, {8, 7, 3, 4}, {4, 3, 1, 2},
{1, 3, 7, 5}, {2, 1, 5, 6}}]]]The solution also exploits the ability to list all the polyhedra by providing no arguments. The solution used the first 20, but there are many more, as you can see.
In[67]:= Length[PolyhedronData[]]
Out[67]= 187You can explore all of them with this little dynamic widget.
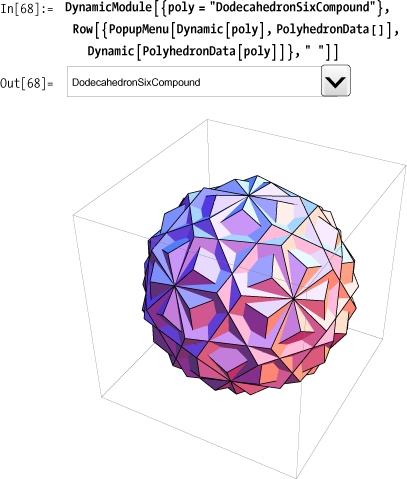
The polyhedra are grouped into classes. You can get a list of these classes or a list of the members of a particular class.
In[69]:= PolyhedronData["Classes"] Out[69]= {Amphichiral, Antiprism, Archimedean, ArchimedeanDual, Chiral, Compound, Concave, Convex, Cuboid, Deltahedron, Dipyramid, Equilateral, Hypercube, Johnson, KeplerPoinsot, Orthotope, Platonic, Prism, Pyramid, Quasiregular, RectangularParallelepiped, Rhombohedron, Rigid, SelfDual, Shaky, Simplex, SpaceFilling, Stellation, Uniform, UniformDual, Zonohedron} In[70]:= PolyhedronData["Chiral"] Out[70]= {GyroelongatedPentagonalBicupola, GyroelongatedPentagonalBirotunda, GyroelongatedPentagonalCupolarotunda, GyroelongatedSquareBicupola, GyroelongatedTriangularBicupola, PentagonalHexecontahedron, PentagonalIcositetrahedron, SnubCube, SnubDodecahedron}
Polyhedra also have various properties, which you can list or use with a polyhedron to retrieve the value.
In[71]:= PolyhedronData["Properties"] Out[71]= {AdjacentFaceIndices, AlternateNames, AlternateStandardNames, Amphichiral, Antiprism, Archimedean, ArchimedeanDual, Centroid, Chiral, Circumcenter, Circumradius, Circumsphere, Classes, Compound, Concave, Convex, Cuboid, DefaultOrientation, Deltahedron, DihedralAngleRules, DihedralAngles, Dipyramid, DualCompound, DualName, DualScale, EdgeCount, EdgeIndices, EdgeLengths, Edges, Equilateral, FaceCount, FaceCountRules, FaceIndices, Faces, GeneralizedDiameter, Hypercube, Image, Incenter, InertiaTensor, Information, Inradius, Insphere, Johnson, KeplerPoinsot, Midcenter, Midradius, Midsphere, Name, NetCoordinates, NetCount, NetEdgeIndices, NetEdges, NetFaceIndices, NetFaces, NetImage, NotationRules, Orientations, Orthotope, Platonic, PolyhedronIndices, Prism, Pyramid, Quasiregular, RectangularParallelepiped, RegionFunction, Rhombohedron, Rigid, SchlaefliSymbol, SelfDual, Shaky, Simplex, SkeletonCoordinates, SkeletonGraphName, SkeletonImage, SkeletonRules, SpaceFilling, StandardName, StandardNames, Stellation, StellationCount, SurfaceArea, SymmetryGroupString, Uniform, UniformDual, VertexCoordinates, VertexCount, VertexIndices, Volume, WythoffSymbol, Zonohedron} In[72]:= PolyhedronData["GyroelongatedPentagonalBicupola", "VertexCount"] Out[72]= 30

Skeletal images show the polygons in terms of connected graphs.

NetImage is my favorite
aspect of PolyhedronData because it
shows how to make a cutout that can be folded into an actual 3D model
of the named polyhedron. My kids like this one, too, although I have
to do all the tedious parts!

You have 3D data from another application that you would like to view or manipulate within Mathematica.
Mathematica 6 can import several popular 3D graphics formats, including Drawing Exchange Format (DXF) produced by AutoCAD and other CAD packages.

Mathematica’s symbolic representation makes it possible to manipulate imported graphics via pattern matching.
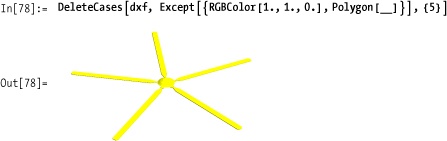
You can change colors and directives.

You can extract elements based on properties. Here we delete all nonyellow polygons (i.e., all but the rotor).
You can emphasize the component polygons by shrinking each toward its center and changing all colors to dark gray.
