8.2 Vector Autoregressive Models
A simple vector model useful in modeling asset returns is the vector autoregressive (VAR) model. A multivariate time series ![]() is a VAR process of order 1, or VAR(1) for short, if it follows the model
is a VAR process of order 1, or VAR(1) for short, if it follows the model
where ![]() is a k-dimensional vector,
is a k-dimensional vector, ![]() is a k × k matrix, and
is a k × k matrix, and ![]() is a sequence of serially uncorrelated random vectors with mean zero and covariance matrix
is a sequence of serially uncorrelated random vectors with mean zero and covariance matrix ![]() . In application, the covariance matrix
. In application, the covariance matrix ![]() is required to be positive definite; otherwise, the dimension of
is required to be positive definite; otherwise, the dimension of ![]() can be reduced. In the literature, it is often assumed that
can be reduced. In the literature, it is often assumed that ![]() is multivariate normal.
is multivariate normal.
Consider the bivariate case [i.e., k = 2, ![]() , and
, and ![]() ]. The VAR(1) model consists of the following two equations:
]. The VAR(1) model consists of the following two equations:
![]()
where Φij is the (i, j)th element of ![]() and ϕi0 is the ith element of
and ϕi0 is the ith element of ![]() . Based on the first equation, Φ12 denotes the linear dependence of r1t on r2, t−1 in the presence of r1, t−1. Therefore, Φ12 is the conditional effect of r2, t−1 on r1t given r1, t−1. If Φ12 = 0, then r1t does not depend on r2, t−1, and the model shows that r1t only depends on its own past. Similarly, if Φ21 = 0, then the second equation shows that r2t does not depend on r1, t−1 when r2, t−1 is given.
. Based on the first equation, Φ12 denotes the linear dependence of r1t on r2, t−1 in the presence of r1, t−1. Therefore, Φ12 is the conditional effect of r2, t−1 on r1t given r1, t−1. If Φ12 = 0, then r1t does not depend on r2, t−1, and the model shows that r1t only depends on its own past. Similarly, if Φ21 = 0, then the second equation shows that r2t does not depend on r1, t−1 when r2, t−1 is given.
Consider the two equations jointly. If Φ12 = 0 and Φ21 ≠ 0, then there is a unidirectional relationship from r1t to r2t. If Φ12 = Φ21 = 0, then r1t and r2t are uncoupled. If Φ12 ≠ 0 and Φ21 ≠ 0, then there is a feedback relationship between the two series.
8.2.1 Reduced and Structural Forms
In general, the coefficient matrix ![]() of Eq. (8.8) measures the dynamic dependence of
of Eq. (8.8) measures the dynamic dependence of ![]() . The concurrent relationship between r1t and r2t is shown by the off-diagonal element σ12 of the covariance matrix
. The concurrent relationship between r1t and r2t is shown by the off-diagonal element σ12 of the covariance matrix ![]() of
of ![]() . If σ12 = 0, then there is no concurrent linear relationship between the two component series. In the econometric literature, the VAR(1) model in Eq. (8.8) is called a reduced-form model because it does not show explicitly the concurrent dependence between the component series. If necessary, an explicit expression involving the concurrent relationship can be deduced from the reduced-form model by a simple linear transformation. Because
. If σ12 = 0, then there is no concurrent linear relationship between the two component series. In the econometric literature, the VAR(1) model in Eq. (8.8) is called a reduced-form model because it does not show explicitly the concurrent dependence between the component series. If necessary, an explicit expression involving the concurrent relationship can be deduced from the reduced-form model by a simple linear transformation. Because ![]() is positive definite, there exists a lower triangular matrix
is positive definite, there exists a lower triangular matrix ![]() with unit diagonal elements and a diagonal matrix
with unit diagonal elements and a diagonal matrix ![]() such that
such that ![]() =
= ![]() ; see Appendix A on Cholesky decomposition. Therefore,
; see Appendix A on Cholesky decomposition. Therefore, ![]() .
.
Define ![]() . Then
. Then
![]()
Since ![]() is a diagonal matrix, the components of
is a diagonal matrix, the components of ![]() are uncorrelated. Multiplying
are uncorrelated. Multiplying ![]() from the left to model (8.8), we obtain
from the left to model (8.8), we obtain
where ![]() is a k-dimensional vector and
is a k-dimensional vector and ![]() =
= ![]() is a k × k matrix. Because of the special matrix structure, the kth row of
is a k × k matrix. Because of the special matrix structure, the kth row of ![]() is in the form (wk1, wk2, … , wk, k−1, 1). Consequently, the kth equation of model (8.9) is
is in the form (wk1, wk2, … , wk, k−1, 1). Consequently, the kth equation of model (8.9) is
where ![]() is the kth element of
is the kth element of ![]() and
and ![]() is the (k, i)th element of
is the (k, i)th element of ![]() . Because bkt is uncorrelated with bit for 1 ≤ i < k, Eq. (8.10) shows explicitly the concurrent linear dependence of rkt on rit, where 1 ≤ i ≤ k − 1. This equation is referred to as a structural equation for rkt in the econometric literature.
. Because bkt is uncorrelated with bit for 1 ≤ i < k, Eq. (8.10) shows explicitly the concurrent linear dependence of rkt on rit, where 1 ≤ i ≤ k − 1. This equation is referred to as a structural equation for rkt in the econometric literature.
For any other component rit of ![]() , we can rearrange the VAR(1) model so that rit becomes the last component of
, we can rearrange the VAR(1) model so that rit becomes the last component of ![]() . The prior transformation method can then be applied to obtain a structural equation for rit. Therefore, the reduced-form model (8.8) is equivalent to the structural form used in the econometric literature. In time series analysis, the reduced-form model is commonly used for two reasons. The first reason is ease in estimation. The second and main reason is that the concurrent correlations cannot be used in forecasting.
. The prior transformation method can then be applied to obtain a structural equation for rit. Therefore, the reduced-form model (8.8) is equivalent to the structural form used in the econometric literature. In time series analysis, the reduced-form model is commonly used for two reasons. The first reason is ease in estimation. The second and main reason is that the concurrent correlations cannot be used in forecasting.
Example 8.3
To illustrate the transformation from a reduced-form model to structural equations, consider the bivariate AR(1) model
![]()
For this particular covariance matrix ![]() , the lower triangular matrix
, the lower triangular matrix
![]()
provides a Cholesky decomposition [i.e., ![]() is a diagonal matrix]. Premultiplying
is a diagonal matrix]. Premultiplying ![]() to the previous bivariate AR(1) model, we obtain
to the previous bivariate AR(1) model, we obtain

where ![]() = Cov(
= Cov(![]() ). The second equation of this transformed model gives
). The second equation of this transformed model gives
![]()
which shows explicitly the linear dependence of r2t on r1t.
Rearranging the order of elements in ![]() , the bivariate AR(1) model becomes
, the bivariate AR(1) model becomes
![]()
The lower triangular matrix needed in the Cholesky decomposition of ![]() becomes
becomes
![]()
Premultiplying ![]() to the earlier rearranged VAR(1) model, we obtain
to the earlier rearranged VAR(1) model, we obtain

where ![]() = Cov(
= Cov(![]() ). The second equation now gives
). The second equation now gives
![]()
Again this equation shows explicitly the concurrent linear dependence of r1t on r2t.
8.2.2 Stationarity Condition and Moments of a VAR(1) Model
Assume that the VAR(1) model in Eq. (8.8) is weakly stationary. Taking expectation of the model and using ![]() =
= ![]() , we obtain
, we obtain
![]()
Since ![]() is time invariant, we have
is time invariant, we have
![]()
provided that the matrix ![]() is nonsingular, where
is nonsingular, where ![]() is the k × k identity matrix.
is the k × k identity matrix.
Using ![]() , the VAR(1) model in Eq. (8.8) can be written as
, the VAR(1) model in Eq. (8.8) can be written as
![]()
Let ![]() be the mean-corrected time series. Then the VAR(1) model becomes
be the mean-corrected time series. Then the VAR(1) model becomes
This model can be used to derive properties of a VAR(1) model. By repeated substitutions, we can rewrite Eq. (8.11) as
![]()
This expression shows several characteristics of a VAR(1) process. First, since ![]() is serially uncorrelated, it follows that Cov(
is serially uncorrelated, it follows that Cov(![]() ) =
) = ![]() . In fact,
. In fact, ![]() is not correlated with
is not correlated with ![]() for all ℓ > 0. For this reason,
for all ℓ > 0. For this reason, ![]() is referred to as the shock or innovation of the series at time t. It turns out that, similar to the univariate case,
is referred to as the shock or innovation of the series at time t. It turns out that, similar to the univariate case, ![]() is uncorrelated with the past value
is uncorrelated with the past value ![]() (j > 0) for all time series models. Second, postmultiplying the expression by
(j > 0) for all time series models. Second, postmultiplying the expression by ![]() , taking expectation, and using the fact of no serial correlations in the
, taking expectation, and using the fact of no serial correlations in the ![]() process, we obtain Cov(
process, we obtain Cov(![]() ) =
) = ![]() . Third, for a VAR(1) model,
. Third, for a VAR(1) model, ![]() depends on the past innovation
depends on the past innovation ![]() with coefficient matrix
with coefficient matrix ![]() . For such dependence to be meaningful,
. For such dependence to be meaningful, ![]() must converge to zero as j → ∞. This means that the k eigenvalues of
must converge to zero as j → ∞. This means that the k eigenvalues of ![]() must be less than 1 in modulus; otherwise,
must be less than 1 in modulus; otherwise, ![]() will either explode or converge to a nonzero matrix as j → ∞. As a matter of fact, the requirement that all eigenvalues of
will either explode or converge to a nonzero matrix as j → ∞. As a matter of fact, the requirement that all eigenvalues of ![]() are less than 1 in modulus is the necessary and sufficient condition for weak stationarity of
are less than 1 in modulus is the necessary and sufficient condition for weak stationarity of ![]() provided that the covariance matrix of
provided that the covariance matrix of ![]()
exists. Notice that this stationarity condition reduces to that of the univariate AR(1) case in which the condition is |ϕ| < 1. Furthermore, because
![]()
the eigenvalues of ![]() are the inverses of the zeros of the determinant
are the inverses of the zeros of the determinant ![]() . Thus, an equivalent sufficient and necessary condition for stationarity of
. Thus, an equivalent sufficient and necessary condition for stationarity of ![]() is that all zeros of the determinant
is that all zeros of the determinant ![]()
are greater than one in modulus; that is, all zeros are outside the unit circle in the complex plane. Fourth, using the expression, we have
![]()
where it is understood that ![]() , the k × k identity matrix.
, the k × k identity matrix.
Postmultiplying ![]() to Eq. (8.11), taking expectation, and using the result Cov(
to Eq. (8.11), taking expectation, and using the result Cov(![]() ) =
) = ![]() for j > 0, we obtain
for j > 0, we obtain
![]()
Therefore,
where ![]() is the lag-j cross-covariance matrix of
is the lag-j cross-covariance matrix of ![]()
. Again this result is a generalization of that of a univariate AR(1) process. By repeated substitutions, Eq. (8.12) shows that
![]()
Pre- and postmultiplying Eq. (8.12) by ![]()
, we obtain
![]()
where ![]() . Consequently, the CCM of a VAR(1) model satisfies
. Consequently, the CCM of a VAR(1) model satisfies
![]()
8.2.3 Vector AR(p) Models
The generalization of VAR(1) to VAR(p) models is straightforward. The time series ![]() follows a VAR(p) model if it satisfies
follows a VAR(p) model if it satisfies
where ![]() and
and ![]() are defined as before, and
are defined as before, and ![]() are k × k matrices. Using the back-shift operator B, the VAR(p) model can be written as
are k × k matrices. Using the back-shift operator B, the VAR(p) model can be written as
![]()
where ![]() is the k × k identity matrix. This representation can be written in a compact form as
is the k × k identity matrix. This representation can be written in a compact form as
![]()
where ![]() is a matrix polynomial. If
is a matrix polynomial. If ![]() is weakly stationary, then we have
is weakly stationary, then we have
![]()
provided that the inverse exists. Let ![]() . The VAR(p) model becomes
. The VAR(p) model becomes
8.14 ![]()
Using this equation and the same techniques as those for VAR(1) models, we obtain that
- Cov(
 ) =
) =  , the covariance matrix of
, the covariance matrix of  .
. - Cov(
 ) =
) =  for ℓ > 0.
for ℓ > 0.  for ℓ > 0.
for ℓ > 0.
The last property is called the moment equations of a VAR(p) model. It is a multivariate version of the Yule–Walker equation of a univariate AR(p) model. In terms of CCM, the moment equations become
![]()
where ![]() .
.
A simple approach to understanding properties of the VAR(p) model in Eq. (8.13) is to make use of the results of the VAR(1) model in Eq. (8.8). This can be achieved by transforming the VAR(p) model of ![]() into a kp-dimensional VAR(1) model. Specifically, let
into a kp-dimensional VAR(1) model. Specifically, let ![]() and
and ![]() be two kp-dimensional processes. The mean of
be two kp-dimensional processes. The mean of ![]() is zero and the covariance matrix of
is zero and the covariance matrix of ![]() is a kp × kp matrix with zero everywhere except for the lower right corner, which is
is a kp × kp matrix with zero everywhere except for the lower right corner, which is ![]() . The VAR(p) model for
. The VAR(p) model for ![]() can then be written in the form
can then be written in the form
where ![]() is a kp × kp matrix given by
is a kp × kp matrix given by
where ![]() and
and ![]() are the k × k zero matrix and identity matrix, respectively. In the literature,
are the k × k zero matrix and identity matrix, respectively. In the literature, ![]() is called the companion matrix of the matrix polynomial
is called the companion matrix of the matrix polynomial ![]() .
.
Equation (8.15) is a VAR(1) model for ![]() , which contains
, which contains ![]() as its last k components. The results of a VAR(1) model shown in the previous section can now be used to derive properties of the VAR(p) model via Eq. (8.15). For example, from the definition,
as its last k components. The results of a VAR(1) model shown in the previous section can now be used to derive properties of the VAR(p) model via Eq. (8.15). For example, from the definition, ![]() is weakly stationary if and only if
is weakly stationary if and only if ![]() is weakly stationary. Therefore, the necessary and sufficient condition of weak stationarity for the VAR(p) model in Eq. (8.13) is that all eigenvalues of
is weakly stationary. Therefore, the necessary and sufficient condition of weak stationarity for the VAR(p) model in Eq. (8.13) is that all eigenvalues of ![]() in Eq. (8.15) are less than 1 in modulus. It is easy to show that
in Eq. (8.15) are less than 1 in modulus. It is easy to show that ![]() . Therefore, similar to the VAR(1) case, the necessary and sufficient condition is equivalent to all zeros of the determinant
. Therefore, similar to the VAR(1) case, the necessary and sufficient condition is equivalent to all zeros of the determinant ![]() being outside the unit circle.
being outside the unit circle.
Of particular relevance to financial time series analysis is the structure of the coefficient matrices ![]() of a VAR(p) model. For instance, if the (i, j)th element Φij(ℓ) of
of a VAR(p) model. For instance, if the (i, j)th element Φij(ℓ) of ![]() is zero for all ℓ, then rit does not depend on the past values of rjt. The structure of the coefficient matrices
is zero for all ℓ, then rit does not depend on the past values of rjt. The structure of the coefficient matrices ![]() thus provides information on the lead–lag relationship between the components of
thus provides information on the lead–lag relationship between the components of ![]() .
.
8.2.4 Building a VAR(p) Model
We continue to use the iterative procedure of order specification, estimation, and model checking to build a vector AR model for a given time series. The concept of partial autocorrelation function of a univariate series can be generalized to specify the order p of a vector series. Consider the following consecutive VAR models:
Parameters of these models can be estimated by the ordinary least-squares (OLS) method. This is called the multivariate linear regression estimation in multivariate statistical analysis; see Johnson and Wichern (1998).
For the ith equation in Eq. (8.16), let ![]() be the OLS estimate of
be the OLS estimate of ![]() and
and ![]() be the estimate of
be the estimate of ![]() , where the superscript (i) is used to denote that the estimates are for a VAR(i) model. Then the residual is
, where the superscript (i) is used to denote that the estimates are for a VAR(i) model. Then the residual is
![]()
For i = 0, the residual is defined as ![]() , where
, where ![]() is the sample mean of
is the sample mean of ![]() . The residual covariance matrix is defined as
. The residual covariance matrix is defined as
To specify the order p, one can test the hypothesis ![]() versus the alternative hypothesis
versus the alternative hypothesis ![]() sequentially for ℓ = 1, 2, … . For example, using the first equation in Eq. (8.16), we can test the hypothesis
sequentially for ℓ = 1, 2, … . For example, using the first equation in Eq. (8.16), we can test the hypothesis ![]() versus the alternative hypothesis
versus the alternative hypothesis ![]() . The test statistic is
. The test statistic is
![]()
where ![]() is defined in Eq. (8.17) and
is defined in Eq. (8.17) and ![]() denotes the determinant of the matrix
denotes the determinant of the matrix ![]() . Under some regularity conditions, the test statistic M(1) is asymptotically a chi-squared distribution with k2 degrees of freedom; see Tiao and Box (1981).
. Under some regularity conditions, the test statistic M(1) is asymptotically a chi-squared distribution with k2 degrees of freedom; see Tiao and Box (1981).
In general, we use the ith and (i − 1)th equations in Eq. (8.16) to test ![]() versus
versus ![]() ; that is, testing a VAR(i) model versus a VAR(i − 1) model. The test statistic is
; that is, testing a VAR(i) model versus a VAR(i − 1) model. The test statistic is
8.18 ![]()
Asymptotically, M(i) is distributed as a chi-squared distribution with k2 degrees of freedom.
Alternatively, one can use the Akaike information criterion (AIC) or its variants to select the order p. Assume that ![]() is multivariate normal and consider the ith equation in Eq. (8.16). One can estimate the model by the maximum-likelihood (ML) method. For AR models, the OLS estimates
is multivariate normal and consider the ith equation in Eq. (8.16). One can estimate the model by the maximum-likelihood (ML) method. For AR models, the OLS estimates ![]() and
and ![]() are equivalent to the (conditional) ML estimates. However, there are differences between the estimates of
are equivalent to the (conditional) ML estimates. However, there are differences between the estimates of ![]() . The ML estimate of
. The ML estimate of ![]() is
is
8.19 ![]()
The AIC of a VAR(i) model under the normality assumption is defined as
![]()
For a given vector time series, one selects the AR order p such that ![]() , where p0 is a prespecified positive integer.
, where p0 is a prespecified positive integer.
Other information criteria available for VAR(i) models are

The HQ criterion is proposed by Hannan and Quinn (1979).
Example 8.4
Assuming that the bivariate series of monthly log returns of IBM stock and the S&P 500 index discussed in Example 8.1 follows a VAR model, we apply the M(i) statistics and AIC to the data. Table 8.3 shows the results of these statistics. Both statistics indicate that a VAR(5) model might be adequate for the data. The M(i) statistics are marginally significant at lags 1, 3, and 5 at the 5% level. The minimum of AIC occurs at order 5. For this particular instance, the M(i) statistic is only marginally significant at the 1% level when i = 2, confirming the previous observation that the dynamic linear dependence between the two return series is weak.
Table 8.3 Order Specification Statistics for Monthly Log Returns of IBM Stock and S&P 500 Index from January 1926 to December 2008a

aThe 5% and 1% critical values of a chi-squared distribution with 4 degrees of freedom are 9.5 and 13.3.
8.2.4.1 Estimation and Model Checking
For a specified VAR model, one can estimate the parameters using either the OLS method or the ML method. The two methods are asymptotically equivalent. Under some regularity conditions, the estimates are asymptotically normal; see Reinsel (1993). A fitted model should then be checked carefully for any possible inadequacy. The Qk(m) statistic can be applied to the residual series to check the assumption that there are no serial or cross correlations in the residuals. For a fitted VAR(p) model, the Qk(m) statistic of the residuals is asymptotically a chi-squared distribution with k2m − g degrees of freedom, where g is the number of estimated parameters in the AR coefficient matrices; see Lütkepohl (2005).
Example 8.4(Continued)
Table 8.4(a) shows the estimation results of a VAR(5) model for the bivariate series of monthly log returns of IBM stock and the S&P 500 index. The specified model is in the form
8.20 ![]()
where the first component of ![]() denotes IBM stock returns. For this particular instance, we do not use AR coefficient matrix at lag 4 because of the weak serial dependence of the data. In general, when the M(i) statistics and the AIC criterion specify a VAR(5) model, all five AR lags should be used. Table 8.4(b) shows the estimation results after some statistically insignificant parameters are set to zero. The Qk(m) statistics of the residual series for the fitted model in Table 8.4(b) give Q2(4) = 16.64 and Q2(8) = 31.55. Since the fitted VAR(5) model has six parameters in the AR coefficient matrices, these two Qk(m) statistics are distributed asymptotically as a chi-squared distribution with degrees of freedom 10 and 26, respectively. The p-values of the test statistics are 0.083 and 0.208, and hence the fitted model is adequate at the 5% significance level. As shown by the univariate analysis, the return series are likely to have conditional heteroscedasticity. We discuss multivariate volatility in Chapter 10.
denotes IBM stock returns. For this particular instance, we do not use AR coefficient matrix at lag 4 because of the weak serial dependence of the data. In general, when the M(i) statistics and the AIC criterion specify a VAR(5) model, all five AR lags should be used. Table 8.4(b) shows the estimation results after some statistically insignificant parameters are set to zero. The Qk(m) statistics of the residual series for the fitted model in Table 8.4(b) give Q2(4) = 16.64 and Q2(8) = 31.55. Since the fitted VAR(5) model has six parameters in the AR coefficient matrices, these two Qk(m) statistics are distributed asymptotically as a chi-squared distribution with degrees of freedom 10 and 26, respectively. The p-values of the test statistics are 0.083 and 0.208, and hence the fitted model is adequate at the 5% significance level. As shown by the univariate analysis, the return series are likely to have conditional heteroscedasticity. We discuss multivariate volatility in Chapter 10.
Table 8.4 Estimation Results of a VAR(5) Model for the Monthly Log Returns, in Percentages, of IBM Stock and S&P 500 Index from January 1926 to December 2008
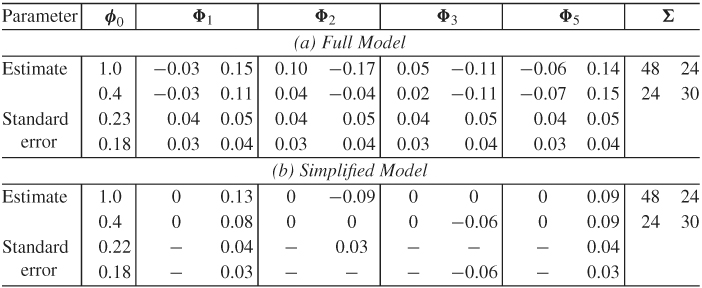
From the fitted model in Table 8.4(b), we make the following observations: (a) The concurrent correlation coefficient between the two innovational series is ![]() , which, as expected, is close to the sample correlation coefficient between r1t and r2t. (b) The two log return series have positive and significant means, implying that the log prices of the two series had an upward trend over the data span. (c) The model shows that
, which, as expected, is close to the sample correlation coefficient between r1t and r2t. (b) The two log return series have positive and significant means, implying that the log prices of the two series had an upward trend over the data span. (c) The model shows that
![]()
Consequently, at the 5% significance level, there is a unidirectional dynamic relationship from the monthly S&P 500 index return to the IBM return. If the S&P 500 index represents the U.S. stock market, then IBM return is affected by the past movements of the market. However, past movements of IBM stock returns do not significantly affect the U.S. market, even though the two returns have substantial concurrent correlation. Finally, the fitted model can be written as

indicating that SP5t is the driving factor of the bivariate series.
8.2.4.2 Forecasting
Treating a properly built model as the true model, one can apply the same techniques as those in the univariate analysis to produce forecasts and standard deviations of the associated forecast errors. For a VAR(p) model, the 1-step-ahead forecast at the time origin h is ![]() , and the associated forecast error is
, and the associated forecast error is ![]() =
= ![]() . The covariance matrix of the forecast error is
. The covariance matrix of the forecast error is ![]() . For 2-step-ahead forecasts, we substitute
. For 2-step-ahead forecasts, we substitute ![]() by its forecast to obtain
by its forecast to obtain
![]()
and the associated forecast error is
![]()
The covariance matrix of the forecast error is ![]() . If
. If ![]() is weakly stationary, then the ℓ-step-ahead forecast
is weakly stationary, then the ℓ-step-ahead forecast ![]() converges to its mean vector
converges to its mean vector ![]() as the forecast horizon ℓ increases and the covariance matrix of its forecast error converges to the covariance matrix of
as the forecast horizon ℓ increases and the covariance matrix of its forecast error converges to the covariance matrix of ![]() .
.
Table 8.5 provides 1-step- to 6-step-ahead forecasts of the monthly log returns, in percentages, of IBM stock and the S&P 500 index at the forecast origin h = 996. These forecasts are obtained by the refined VAR(5) model in Table 8.4(b). As expected, the standard errors of the forecasts converge to the sample standard errors 7.03 and 5.53, respectively, for the two log return series.
Table 8.5 Forecasts of a VAR(5) Model for Monthly Log Returns, in Percentages, of IBM Stock and S&P 500 Index: Forecast Origin Is December 2008

In summary, building a VAR model involves three steps: (a) Use the test statistic M(i) or some information criterion to identify the order, (b) estimate the specified model by using the least-squares method and, if necessary, reestimate the model by removing statistically insignificant parameters, and (c) use the Qk(m) statistic of the residuals to check the adequacy of a fitted model. Other characteristics of the residual series, such as conditional heteroscedasticity and outliers, can also be checked. If the fitted model is adequate, then it can be used to obtain forecasts and make inference concerning the dynamic relationship between the variables.
We used SCA to perform the analysis in this section. The commands used include miden, mtsm, mest, and mfore, where the prefix m stands for multivariate. Details of the commands and output are shown below.
8.2.4.3 SCA Demonstration
Output has been edited and % denotes explanation in the following:
input date, ibm, sp5. file ‘m-ibmsp2608.txt’.
--% compute percentage log returns.
ibm=ln(ibm+1)*100
--
sp5=ln(sp5+1)*100
--% model identification
miden ibm,sp5. arfits 1 to 12.
TIME PERIOD ANALYZED . . . . . . . . . . . . 1 TO 996
EFFECTIVE NUMBER OF OBSERVATIONS (NOBE). . . 996
SERIES NAME MEAN STD. ERROR
1 IBM 1.0891 7.0298
2 SP5 0.4301 5.5346
NOTE: THE APPROX. STD. ERROR FOR THE ESTIMATED CORRELATIONS BELOW
IS (1/NOBE**.5) = 0.03169
SAMPLE CORRELATION MATRIX OF THE SERIES
1.00
0.65 1.00
SUMMARIES OF CROSS CORRELATION MATRICES USING +,-,., WHERE
+ DENOTES A VALUE GREATER THAN 2/SQRT(NOBE)
- DENOTES A VALUE LESS THAN −2/SQRT(NOBE)
. DENOTES A NON-SIGNIFICANT VALUE BASED ON THE ABOVE
CRITERION
CROSS CORRELATION MATRICES IN TERMS OF +,-,.
LAGS 1 THROUGH 6
. + . - . . . . . + . .
. + . . . - . . . + . .
LAGS 7 THROUGH 12
. . + . . . . . . . . .
. . + . . + . . . . . .
======== STEPWISE AUTOREGRESSION SUMMARY ========
--------------------------------------------------------------
I RESIDUAL I EIGENVAL.I CHI-SQ I I SIGN.
LAG I VARIANCESI OF SIGMA I TEST I AIC I PAR. AR
----+----------+----------+---------+----------+--------------
1 I .492E+02 I .133E+02 I 10.76 I 6.795 I . +
I .306E+02 I .665E+02 I I I . +
----+----------+----------+---------+----------+--------------
2 I .486E+02 I .133E+02 I 13.41 I 6.789 I + -
I .306E+02 I .659E+02 I I I . .
----+----------+----------+---------+----------+--------------
3 I .484E+02 I .132E+02 I 10.34 I 6.786 I . .
I .303E+02 I .655E+02 I I I . .
-----+----------+----------+---------+----------+--------------
4 I .484E+02 I .131E+02 I 7.78 I 6.786 I . .
I .302E+02 I .655E+02 I I I . .
----+----------+----------+---------+----------+--------------
5 I .480E+02 I .131E+02 I 12.07 I 6.782 I . +
I .299E+02 I .648E+02 I I I - +
----+----------+----------+---------+----------+--------------
6 I .479E+02 I .131E+02 I 1.93 I 6.788 I . .
I .298E+02 I .647E+02 I I I . .
----+----------+----------+---------+----------+--------------
7 I .479E+02 I .130E+02 I 2.68 I 6.793 I . .
I .298E+02 I .647E+02 I I I . .
----+----------+----------+---------+----------+--------------
8 I .477E+02 I .130E+02 I 7.09 I 6.794 I . .
I .296E+02 I .643E+02 I I I . .
----+----------+----------+---------+----------+--------------
9 I .476E+02 I .130E+02 I 5.23 I 6.797 I . .
I .295E+02 I .642E+02 I I I . .
----+----------+----------+---------+----------+--------------
10 I .476E+02 I .130E+02 I 1.43 I 6.803 I . .
I .295E+02 I .641E+02 I I I . .
----+----------+----------+---------+----------+--------------
11 I .475E+02 I .130E+02 I 1.81 I 6.809 I . .
I .294E+02 I .640E+02 I I I . .
----+----------+----------+---------+----------+--------------
12 I .475E+02 I .129E+02 I 1.88 I 6.815 I . .
I .294E+02 I .640E+02 I I I . .
----+----------+----------+---------+----------+--------------
NOTE:CHI-SQUARED CRITICAL VALUES WITH 4 DEGREES OF FREEDOM ARE
5 PERCENT: 9.5 1 PERCENT: 13.3
-- % model specification of a VAR(5) model without lag 4.
mtsm m1. series ibm, sp5. model @
(i-p2*b-p2*b**2-p3*b**3-p5*b**5)series=c+noise.
-- % estimation
mestim m1. hold resi(r1,r2).
-- % demonstration of setting zero constraint
p2(2,2)=0
--
cp2(2,2)=1
--
p3(1,2)=0
--
cp3(1,2)=1
--
mestim m1. hold resi(r1,r2)
FINAL MODEL SUMMARY WITH CONDITIONAL LIKELIHOOD PAR. EST.
----- CONSTANT VECTOR (STD ERROR) -----
1.039 ( 0.223 )
0.390 ( 0.176 )
----- PHI MATRICES -----
ESTIMATES OF PHI( 1 ) MATRIX AND SIGNIFICANCE
.000 .129 . +
.000 .080 . +
STANDARD ERRORS
-- .040
-- .031
ESTIMATES OF PHI( 2 ) MATRIX AND SIGNIFICANCE
.000 −.090 . -
.000 .000 . .
STANDARD ERRORS
-- .031
-- --
ESTIMATES OF PHI( 3 ) MATRIX AND SIGNIFICANCE
.000 .000 . .
.000 −.061 . -
STANDARD ERRORS
-- --
-- .024
ESTIMATES OF PHI( 5 ) MATRIX AND SIGNIFICANCE
.000 .093 . +
.000 .087 . +
STANDARD ERRORS
-- .040
-- .032
------------------------
ERROR COVARIANCE MATRIX
------------------------
1 2
1 48.328570
2 24.361464 30.027406
---------------------------------------------------------------- % compute residual cross-correlation matrices
miden r1,r2. maxl 12.
-- % prediction
mfore m1. nofs 6.
--------------------------------------------------------------
6 FORECASTS, BEGINNING AT ORIGIN = 996
--------------------------------------------------------------
SERIES: IBM SP5
TIME FORECAST STD ERR FORECAST STD ERR
997 1.954 6.952 1.698 5.480
998 0.304 6.988 0.173 5.497
999 −0.815 7.001 −1.263 5.497
1000 0.138 7.001 −0.494 5.507
1001 1.162 7.002 0.408 5.508
1002 1.294 7.022 0.649 5.528
8.2.5 Impulse Response Function
Similar to the univariate case, a VAR(p) model can be written as a linear function of the past innovations, that is,
where ![]() =
= ![]() provided that the inverse exists, and the coefficient matrices
provided that the inverse exists, and the coefficient matrices ![]() can be obtained by equating the coefficients of Bi in the equation
can be obtained by equating the coefficients of Bi in the equation
![]()
where ![]() is the identity matrix. This is a moving-average representation of
is the identity matrix. This is a moving-average representation of ![]() with the coefficient matrix
with the coefficient matrix ![]() being the impact of the past innovation
being the impact of the past innovation ![]() on
on ![]() . Equivalently,
. Equivalently, ![]() is the effect of
is the effect of ![]() on the future observation
on the future observation ![]() . Therefore,
. Therefore, ![]() is often referred to as the impulse response function of
is often referred to as the impulse response function of ![]() . However, since the components of
. However, since the components of ![]() are often correlated, the interpretation of elements in
are often correlated, the interpretation of elements in ![]() of Eq. (8.21) is not straightforward. To aid interpretation, one can use the Cholesky decomposition mentioned earlier to transform the innovations so that the resulting components are uncorrelated. Specifically, there exists a lower triangular matrix
of Eq. (8.21) is not straightforward. To aid interpretation, one can use the Cholesky decomposition mentioned earlier to transform the innovations so that the resulting components are uncorrelated. Specifically, there exists a lower triangular matrix ![]() such that
such that ![]() , where
, where ![]() is a diagonal matrix and the diagonal elements of
is a diagonal matrix and the diagonal elements of ![]() are unity. See Eq. (8.9). Let
are unity. See Eq. (8.9). Let ![]() . Then, Cov(
. Then, Cov(![]() ) =
) = ![]() so that the elements bjt are uncorrelated. Rewrite Eq. (8.21) as
so that the elements bjt are uncorrelated. Rewrite Eq. (8.21) as
8.22 
where ![]() and
and ![]() . The coefficient matrices
. The coefficient matrices ![]() are called the impulse response function of
are called the impulse response function of ![]() with respect to the orthogonal innovations
with respect to the orthogonal innovations ![]() . Specifically, the (i, j)th element of
. Specifically, the (i, j)th element of ![]() ; that is,
; that is, ![]() , is the impact of bj, t on the future observation ri, t+ℓ. In practice, one can further normalize the orthogonal innovation
, is the impact of bj, t on the future observation ri, t+ℓ. In practice, one can further normalize the orthogonal innovation ![]() such that the variance of bit is one. A weakness of the above orthogonalization is that the result depends on the ordering of the components of
such that the variance of bit is one. A weakness of the above orthogonalization is that the result depends on the ordering of the components of ![]() . In particular, b1t = a1t so that a1t is not transformed. Different orderings of the components of
. In particular, b1t = a1t so that a1t is not transformed. Different orderings of the components of ![]() may lead to different impulse response functions. Interpretation of the impulse response function is, therefore, associated with the innovation series
may lead to different impulse response functions. Interpretation of the impulse response function is, therefore, associated with the innovation series ![]() .
.
Both SCA and S-Plus enable one to obtain the impulse response function of a fitted VAR model. To demonstrate analysis of VAR models in S-Plus, we again use the monthly log return series of IBM stock and the S&P 500 index of Example 8.1. For details of S-Plus commands, see Zivot and Wang (2003).
8.2.5.1 S-Plus Demonstration
The following output has been edited and % denotes explanation:
> module(finmetrics)
> da=read.table(“m-ibmsp2608.txt”,header=T) % Load data
> ibm=log(da[,2]+1)*100 % Compute percentage log returns
> sp5=log(da[,3]+1)*100
> y=cbind(ibm,sp5) % Create a vector series
> y1=data.frame(y) % Crate a data frame
> ord.choice=VAR(y1,max.ar=10) % Order selection using BIC
> names(ord.choice)
[1] “R” “coef” “fitted” “residuals” “Sigma” “df.resid”
[7] “rank” “call” “ar.order” “n.na” “terms” “Y0”
[13] “info”
> ord.choice$ar.order % selected order
[1] 1
> ord.choice$info
ar(1) ar(2) ar(3) ar(4) ar(5) ar(6)
BIC 12325.41 12339.42 12356.58 12376.28 12391.57 12417.2
ar(7) ar(8) ar(9) ar(10)
BIC 12442.03 12462.5212484.78 12510.91
> ord=VAR(y1,max.ar=10,criterion=‘AIC’) % Using AIC
> ord$ar.order
[1] 5
> ord$info
ar(1) ar(2) ar(3) ar(4) ar(5) ar(6)
AIC 12296.04 12290.48 12288.07 12288.2 12283.91 12289.96
ar(7) ar(8) ar(9) ar(10)
AIC 12295.22 12296.13 12298.82 12305.37
The AIC selects a VAR(5) model as before, but BIC selects a VAR(1) model. For simplicity, we shall use VAR(1) specification in the demonstration. Note that different normalizations are used between the two packages so that the values of information criteria appear to be different; see the AIC in Table 8.3. This is not important because normalization does not affect order selection. Turn to estimation.
> var1.fit=VAR(y∼ar(1)) % Estimate a VAR(1) model
> summary(var1.fit)
Call:
VAR(formula = y ∼ ar(1))
Coefficients:
ibm sp5
(Intercept) 1.0614 0.4087
(std.err) 0.2249 0.1773
(t.stat) 4.7198 2.3053
ibm.lag1 −0.0320 −0.0223
(std.err) 0.0413 0.0326
(t.stat) −0.7728 −0.6855
sp5.lag1 0.1503 0.1020
(std.err) 0.0525 0.0414
(t.stat) 2.8612 2.4637
Regression Diagnostics:
ibm sp5
R-squared 0.0101 0.0075
Adj. R-squared 0.0081 0.0055
Resid. Scale 7.0078 5.5247
Information Criteria:
logL AIC BIC HQ
−6193.988 12399.977 12429.393 12411.159
total residual
Degree of freedom: 995 992
> plot(var1.fit)
Make a plot selection (or 0 to exit):
1: plot: All
2: plot: Response and Fitted Values
3: plot: Residuals
....
8: plot: PACF of Squared Residuals
Selection: 3
The fitted model is
![]()
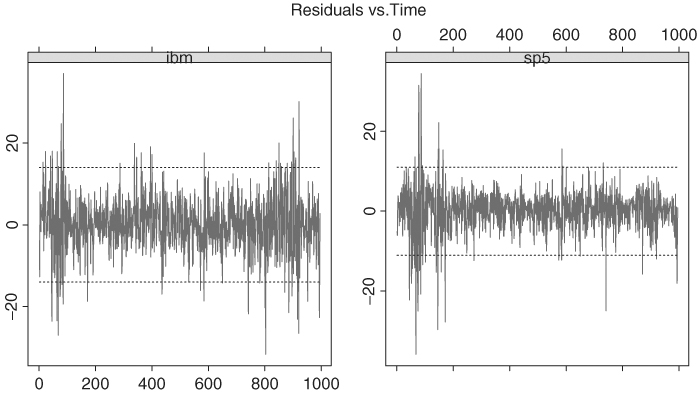
Based on t statistics of the coefficient estimates, only the lagged variable SP5t−1 is informative in both equations. Figure 8.5 shows the time plots of the two residual series, where the two horizontal lines indicate the two standard error limits. As expected, there exist clusters of outlying observations.
Figure 8.5 Residual plots of fitting a VAR(1) model to the monthly log returns, in percentages, of IBM stock and S&P 500 index. Sample period is from January 1926 to December 2008.
Next, we compute 1-step- to 6-step-ahead forecasts and the impulse response function of the fitted VAR(1) model when the IBM stock return is the first component of ![]() . Compared with those of a VAR(5) model in Table 8.5, the forecasts of the VAR(1) model converge faster to the sample mean of the series.
. Compared with those of a VAR(5) model in Table 8.5, the forecasts of the VAR(1) model converge faster to the sample mean of the series.
> var1.pred=predict(var1.fit,n.predict=6) % Compute forecasts
> summary(var1.pred)
Predicted Values with Standard Errors:
ibm sp5
1-step-ahead 1.0798 0.4192
(std.err) 7.0078 5.5247
2-step-ahead 1.0899 0.4274
(std.err) 7.0434 5.5453
3-step-ahead 1.0908 0.4280
(std.err) 7.0436 5.5454
...
6-step-ahead 1.0909 0.4280
(std.err) 7.0436 5.5454
> plot(var1.pred,y,n.old=12) % Obtain forecast plot
% Below is to compute the impulse response function
> var1.irf=impRes(var1.fit,period=6,std.err=′asymptotic′)
> summary(var1.irf)
Impulse Response Function:
(with responses in rows, and innovations in columns)
, , lag.0
ibm sp5
ibm 6.9973 0.0000
(std.err) 0.1569 0.0000
sp5 3.5432 4.2280
(std.err) 0.1558 0.0948
, , lag.1
ibm sp5
ibm 0.3088 0.6353
(std.err) 0.2217 0.2221
sp5 0.2050 0.4312
(std.err) 0.1746 0.1750
.....
> plot(var1.irf)
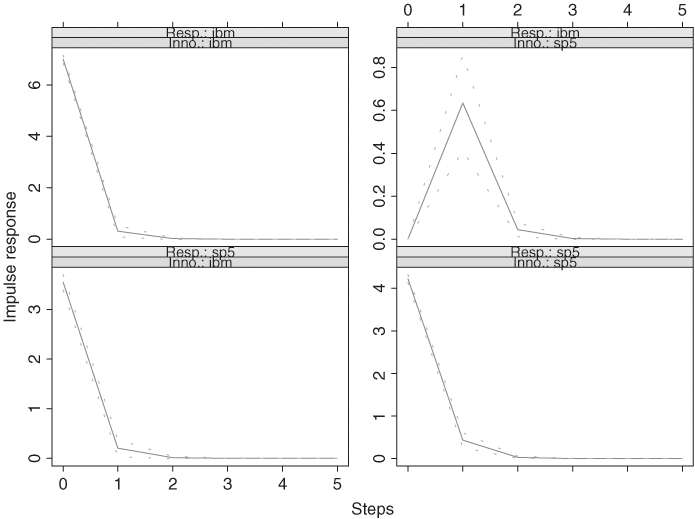
Figure 8.6 shows the forecasts and their pointwise 95% confidence intervals along with the last 12 data points of the series. Figure 8.7 shows the impulse response functions of the fitted VAR(1) model where the IBM stock return is the first component of ![]() . Since the dynamic dependence of the returns is weak, the impulse response functions exhibit simple patterns and decay quickly.
. Since the dynamic dependence of the returns is weak, the impulse response functions exhibit simple patterns and decay quickly.
Figure 8.6 Forecasting plots of fitted VAR(1) model to monthly log returns, in percentages, of IBM stock and S&P 500 index. Sample period is from January 1926 to December 2008.

Figure 8.7 Plots of impulse response functions of orthogonal innovations for fitted VAR(1) model to monthly log returns, in percentages, of IBM stock and S&P 500 index. Sample period is from January 1926 to December 2008.